







 本文总结了1973年Ludwig关于交叉极化定义的研究,探讨了三种不同的坐标系下交叉极化的定义方式及优缺点。重点介绍了被广泛应用的Ludwig′s3rd坐标系,并对比了其与其他两种定义的区别。
本文总结了1973年Ludwig关于交叉极化定义的研究,探讨了三种不同的坐标系下交叉极化的定义方式及优缺点。重点介绍了被广泛应用的Ludwig′s3rd坐标系,并对比了其与其他两种定义的区别。
交叉极化定义(Cross-Polarization)
交叉极化定义(Cross-Polarization)
本文是对Ludwig交叉极化定义的文章做出的学习总结和探讨,欢迎大家批评指正。首先贴出文章链接,大家也可以在IEEE搜索下载。
写在前面
文章发表于1973年论文当年(1973年)对交叉极化(Cross-polarization)没有统一定义,公认的定义较为含糊:与参考极化正交的极化方向。原文译文如下:
“利用正交极化为每个频带提供两个通信信道已经引起了对天线方向图的极化纯度的兴趣。令人惊讶的是,目前还没有普遍接受的关于‘交叉极化’的定义,并且至少有三种不同的定义在文献中被明确或隐含地使用。IEEE标准的定义是“与参考极化正交的极化”,对于圆极化这样的描述是足够的,但对于线性或椭圆极化,参考极化的方向很有必要重新定义。”
因此参考极化的定义不同,得到交叉极化的结果也不尽相同。在定义交叉极化之前,首先需要给出几个概念:
- Reference polarization:参考极化
- Cross-polarization:交叉极化(与参考极化垂直的极化)
- Co-polarization:共面极化,也称主极化(与参考极化平行的极化)
注:这里的极化通常指的是方向(或者说单位矢量)。在任意场点处,用极化方向(参考极化矢量和交叉极化矢量)与馈源的电场矢量相乘,即得到电场的交叉极化分量和共面极化分量。
三种坐标系及其主极化/交叉极化定义
- 定义1:
采用直角坐标,辐射场任意场点处的参考极化方向为 i y i_y iy,交叉极化方向为 i x i_x ix方向。 - 定义2:
采用球坐标系,参考极化方向定义为场点所在切面内的俯仰角方向,且 ,和传播方向满足左手系
(不知道是不是正确,根据图示总结) - 定义3:
采用球坐标系,具体数学描述较为复杂,测试步骤如下。
① 被测天线及其天线座设置在XOY平面内,被测天线可绕轴线转动,从0至360度遍历方位角 ϕ \phi ϕ ,天线座固定在源点。接收探针(天线)及其天线座设置在YOZ平面内,探针可绕天线座旋转,天线座可在YOZ平面绕源点旋转0至180度遍历俯仰角 θ \theta θ 。
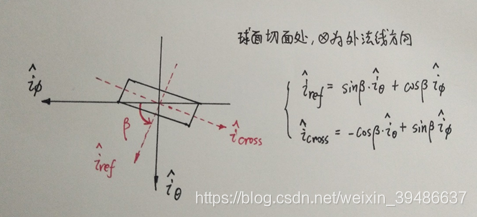
② 方向图测试从俯仰角为 θ = 0 \theta=0 θ=0 开始,当测试到任意俯仰角时,接收天线座固定在对应 θ \theta θ 处,被测天线围绕轴线旋转 ϕ \phi ϕ,同时接收天线也绕轴线旋转对应的偏角 β \beta β 。
③ 则对任意位置 ( θ , ϕ \theta,\phi θ,ϕ ) 处,接收天线测得与接收天线极化方向平行的分量为参考极化分量,垂直的为交叉极化分量。
④ 将水平方位角 ϕ \phi ϕ 遍历0到360度,俯仰角 θ \theta θ 遍历0到180度,则测试完毕,得到每个场点位置处的参考极化和交叉极化分量。
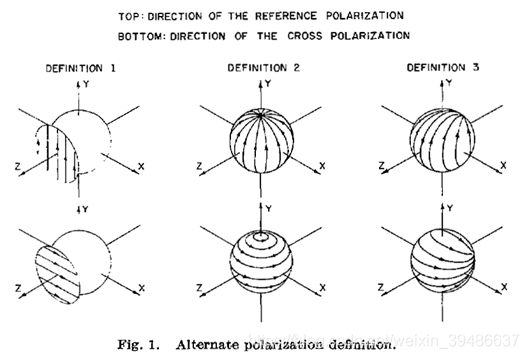
三种主极化/交叉极化示意图
三种坐标系下,主极化/交叉极化方向的示意图如下图所示。
三种主极化/交叉极化的数学表达式
原文中对交叉极化方向矢量的定义,三种坐标系下的具体表达式如下表所示。
| 定义类型 | 表达式 |
|---|---|
| 定义1 |  |
| 定义2 | 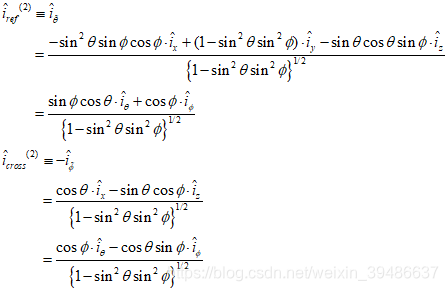 |
| 定义3 | 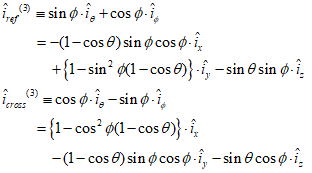 |
注:笔者发现定义二中,公式表示的参考极化和主极化方向,与示意图结果不同,两者方向相反但手性相同。不知道为什么(╥╯^╰╥)。
三种主极化/交叉极化的优缺点
定义1:
适用于源电流分布,理解较为简单,参考方向和交叉极化方向是绝对的,不随角度变化而变化。但是对于复杂天线不实用。
定义2:
比较容易理解,对于单极化天线适用,但是不用于双极化天线,次级方向图很差,并且馈电效率不相容。
定义3:
最为严谨,适用最广。综合定义1和2的优点,适用于多极化天线,面天线等情况,天线孔径效率高(文中提到,不是很理解)。但是表达式和源电流的极化分量没有完全对应。
选取定义3的理由
本文的第3种交叉极化定义被后人广泛运用,也成 L u d w i g ′ s 3 r d Ludwig's 3^{rd} Ludwig′s3rd 坐标系。之所以选用它,相比前两种定义它有如下优点。
- 远区场分布都是球面波,定义1的直角坐标并不处处适用,非常麻烦。而定义2和定义3是球坐标系定义,处处与球面相切。
- 当测试天线为双极化天线时,需要提供两个正交的信道。对定义2而言,围绕z轴旋转90度前后得到的两个参考方向并不正交。换言之,定义2仅对单极化有用,双极化天线时接收天线将无法分辨出两个独立信道的方向图。而定义3和定义1满足旋转90度正交性,适用于双极化天线。
其他名词
- 天线座 Positioner
文中出现的是"elevation-over-azimuth",抬升方位角天线座,也称俯仰-方位型天线座。天线座只控制天线在方位角内旋转,方位轴与地面垂直,俯仰轴与方位轴垂直。此外,还有其他的天线座和坐标系,如对应的"azimuth-over-elevation"则刚好相反,可以参考论坛和CST等软件的辅助信息。 - 探针偏角 β
1.定义:
文中没有明确定义,个人认为不妨理解为接收天线极化方向与测试水平面的夹角。
2.设定的意义:
避免探针偏角失调,误差可控。文中给出了定量分析,当偏角产生误差角 ϵ \epsilon ϵ 时,对应的结果为

3.设定值
原文指出在定义3中,探针偏角满足以下设定:
对参考极化满足 β = ϕ \beta=\phi β=ϕ。
对交叉极化满足 β = ϕ \beta=\phi β=ϕ ± 90°。
也正是因为满足偏角 β \beta β 与测试方位角 ϕ \phi ϕ 相关,所以测试天线转动一定方位角时,接收探针的偏角都会转动相同角度。纯依靠数学模型理解较为复杂。
参考文献
[1] https://blog.csdn.net/pys123abc/article/details/89183271

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









