







 本文详细解析了基于PyTorch的SSD模型,从eval_ssd.py的测试角度出发,介绍了网络构建、模型读取、数据集构建、图片预处理、检测、后处理等步骤。涉及的文件和函数包括logger.py、vgg_ssd.py、ssd.py、prior_box.py、box_utils.py、multibox_loss.py、inference.py、voc_dataset.py、predictor.py和post_processor.py等,阐述了每个部分在SSD检测流程中的作用。
本文详细解析了基于PyTorch的SSD模型,从eval_ssd.py的测试角度出发,介绍了网络构建、模型读取、数据集构建、图片预处理、检测、后处理等步骤。涉及的文件和函数包括logger.py、vgg_ssd.py、ssd.py、prior_box.py、box_utils.py、multibox_loss.py、inference.py、voc_dataset.py、predictor.py和post_processor.py等,阐述了每个部分在SSD检测流程中的作用。
本文所使用的SSD-master基于PyTorch 1.0,源码地址:lufficc/SSD
这篇文章写给渴望跑通自己第一个深度学习模型的小白们,可做入门参考。
在上手代码之前阅读SSD :Single Shot MultiBox Detector论文是必要的,对于原理的理解很重要。
写在前面:接下来将从test的角度出发将整个流程进行一次(包括网络构建、模型读取、数据集构建、图片预处理、检测、后处理、计算AP和mAP等等)。代码中注释标为#*num则表明此处调用了别的文件中的函数或者类,在该段代码后将会紧接着介绍所调用内容的功能。行文顺序基本上按着程序执行顺序展开。
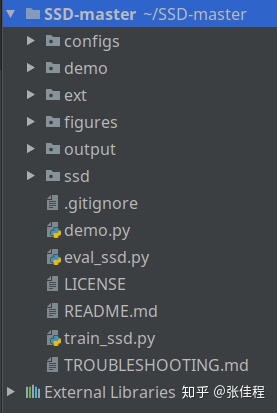
整个工程如图所示:
首先强调一下ssd/config/defaults.py和configs/*.yaml的重要性,做为整个工程的配置文件,其内参数具有全局性,可能在工程中不同的地方用到,参数的意义会在其使用的地方说明。
eval_ssd.py相当于test文件,直接从它入手看起:
import argparse
import logging
import os
import torch
import torch.utils.data
from ssd.config import cfg
from ssd.engine.inference import do_evaluation
from ssd.modeling.vgg_ssd import build_ssd_model
from ssd.utils import distributed_util
from ssd.utils.logger import setup_logger
def main():
# argparse是python标准库里面用来处理命令行参数的库
# import argparse导入模块;parser = argparse.ArgumentParser()创建一个解析对象
# parser.add_argument()向该对象中添加你要关注的命令行参数和选项; parser.parse_args()进行解析
parser = argparse.ArgumentParser(description='SSD Evaluation on VOC and COCO dataset.')
parser.add_argument(
"--config-file",
default="configs/ssd512_voc0712.yaml",
metavar="FILE", #metavar - 参数在帮助信息中的名字。
help="path to config file", # help中的内容说明了参数的意义
type=str,
)
parser.add_argument("--local_rank", type=int, default=0)
parser.add_argument("--weights", type=str, help="Trained weights.")
parser.add_argument("--output_dir", default="eval_results", type=str, help="The directory to store evaluation results.")
parser.add_argument(
"opts",
help="Modify config options using the command-line",
default=None,
nargs=argparse.REMAINDER, # argparse.REMAINDER 命令行参数保存到一个list中
)
args = parser.parse_args()
# gpu数量,若大于一个可启用分布式训练
num_gpus = int(os.environ["WORLD_SIZE"]) if "WORLD_SIZE" in os.environ else 1
distributed = num_gpus > 1
if torch.cuda.is_available():
# This flag allows you to enable the inbuilt cudnn auto-tuner to
# find the best algorithm to use for your hardware.
torch.backends.cudnn.benchmark = True
if distributed:
torch.cuda.set_device(args.local_rank)
torch.distributed.init_process_group(backend="nccl", init_method="env://")
# update the config options with the config file
cfg.merge_from_file(args.config_file)
# manual override some options
cfg.merge_from_list(args.opts)
cfg.freeze()
# 设置日志。 logger.info向屏幕打印信息。
logger = setup_logger("SSD", distributed_util.get_rank()) #*1
logger.info("Using {} GPUs".format(num_gpus))
logger.info(args)
logger.info("Loaded configuration file {}".format(args.config_file))
# 打开配置文件,读取、打印其内容
with open(args.config_file, "r") as cf:
config_str = "n" + cf.read()
logger.info(config_str)
logger.info("Running with config:n{}".format(cfg))
evaluation(cfg, weights_file=args.weights, output_dir=args.output_dir, distributed=distributed) #*调用evaluation()函数
def evaluation(cfg, weights_file, output_dir, distributed):
if not os.path.exists(output_dir): #The directory to store evaluation results.
os.makedirs(output_dir)
# torch.device代表将torch.Tensor分配到的设备的对象,包含一个设备类型('cpu'或'cuda')和可选的设备的序号
device = torch.device(cfg.MODEL.DEVICE)
model = build_ssd_model(cfg) #*2
model.load(weights_file) # 读取权重文件
logger = logging.getLogger("SSD.inference") # logger:日志对象,logging模块中最基础的对象,用logging.getLogger(name)方法进行初始化
logger.info('Loaded weights from {}.'.format(weights_file))
model.to(device) # 模型加载
do_evaluation(cfg, model, output_dir, distributed) #*9
if __name__ == '__main__':
main()eval_ssd.py的#*1处调用了 ssd/utils/logger.py 中的 setup_logger函数,主要用于设置日志,如下:
import logging
import sys
# logging是python的一个日志模块
def setup_logger(name, distributed_rank):
logger = logging.getLogger(name) # 设置日志名字
logger.setLevel(logging.DEBUG) # 设置日志级别,日志级别大小关系为:CRITICAL > ERROR > WARNING > INFO > DEBUG > NOTSET,也可以自己定义日志级别。
# don't log results for the non-master process
if distributed_rank > 0:
return logger
# print函数是对sys.stdout的高级封装,在python中调用print时,事实上调用了sys.stdout.write(obj+'n')
# 如果需要更好的控制输出,而print不能满足需求,可以使用sys.stdout,sys.stdin,sys.stderr
# logging.StreamHandler: 日志输出到流,可以是sys.stderr、sys.stdout或者文件
stream_handler = logging.StreamHandler(stream=sys.stdout)
stream_handler.setLevel(logging.DEBUG)
# format: 指定输出的格式和内容, %(asctime)s: 打印日志的时间,%(name)s:打印日志名字,%(levelname)s: 打印日志级别名称,%(message)s: 打印日志信息
formatter = logging.Formatter("%(asctime)s %(name)s %(levelname)s: %(message)s")
stream_handler.setFormatter(formatter)
# logging有一个日志处理的主对象,其它处理方式都是通过addHandler添加进去的
logger.addHandler(stream_handler)
return loggereval_ssd.py的#*2处调用了ssd/modeling/vgg_ssd.py中的build_ssd_model函数,完成SSD网络的搭建,如下:
import torch.nn as nn
from ssd.modeling.ssd import SSD
# borrowed from https://github.com/amdegroot/ssd.pytorch/blob/master/ssd.py
# 定义主干网VGG
def add_vgg(cfg, batch_norm=False):
layers = [] # 用于存放vgg网络的list
in_channels = 3 # 默认RGB图像,因此通道数=3
for v in cfg: # 多层循环,数据信息存放在字典vgg_base中
if v == 'M': # maxpooling,
layers += [nn.MaxPool2d(kernel_size=2, stride=2)]
elif v == 'C': # maxpooling,边缘补NAN
layers += [nn.MaxPool2d(kernel_size=2, stride=2, ceil_mode=True)]
else: # 卷积前后维度读取字典中数据
conv2d = nn.Conv2d(in_channels, v, kernel_size=3, padding=1)
if batch_norm: #BN层
layers += [conv2d, nn.BatchNorm2d(v), nn.ReLU(inplace=True)]
else: #ReLU层
layers += [conv2d, nn.ReLU(inplace=True)]
in_channels = v
pool5 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
conv6 = nn.Conv2d(512, 1024, kernel_size=3, padding=6, dilation=6) # 空洞卷积,扩张率为6(可以扩大卷积感受野的范围,但没有增加卷积size)
conv7 = nn.Conv2d(1024, 1024, kernel_size=1)
layers += [pool5, conv6,
nn.ReLU(inplace=True), conv7, nn.ReLU(inplace=True)]
return layers
# 定义新添加的特征层
def add_extras(cfg, i, size=300):
# Extra layers added to VGG for feature scaling
layers = []
in_channels = i
flag = False
for k, v in enumerate(cfg): # 多层循环,数据信息存放在字典extras_base中
if in_channels != 'S': # S代表stride,为2时候就相当于缩小feature map
if v == 'S':
layers += [nn.Conv2d(in_channels, cfg[k + 1], kernel_size=(1, 3)[flag], stride=2, padding=1)]
else:
layers += [nn.Conv2d(in_channels, v, kernel_size=(1, 3)[flag])]
flag = not flag
in_channels = v
if size == 512: # 对于SSD512额外添加的层
layers.append(nn.Conv2d(in_channels, 128, kernel_size=1, stride=1))
layers.append(nn.Conv2d(128, 256, kernel_size=4, stride=1, padding=1))
return layers
# regression_headers的输出维度是default box的种类(4or6)*4
# classification_headers的输出维度是default box的种类(4or6)*num_class
# 定义需要进行位置回归和输出置信分数的层
def add_header(vgg, extra_layers, boxes_per_location, num_classes):
regression_headers = []
classification_headers = []
vgg_source = [21, -2]
# 预测分支是全卷积的,4对应bbox坐标,num_classes对应预测目标类别,如VOC = 21
for k, v in enumerate(vgg_source): # 第21层和倒数第二层
regression_headers += [nn.Conv2d(vgg[v].out_channels,
boxes_per_location[k] * 4, kernel_size=3, padding=1)]
classification_headers += [nn.Conv2d(vgg[v].out_channels,
boxes_per_location[k] * num_classes, kernel_size=3, padding=1)]
# 对应的参与检测的分支数
for k, v in enumerate(extra_layers[1::2], 2): # 找到对应的层
regression_headers += [nn.Conv2d(v.out_channels, boxes_per_location[k]
* 4, kernel_size=3, padding=1)]
classification_headers += [nn.Conv2d(v.out_channels, boxes_per_location[k]
* 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 137
137











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









