





头条号私信回复1,可免费获取海量资源下载链接
本文任务:掌握台达B2/B2L系列伺服的应用
目录
1.伺服各部分及主电源配线
2.位置、速度、扭矩模式接线图
3.伺服的DI/DO针脚规划
4.相关参数设置
5.报警一览表
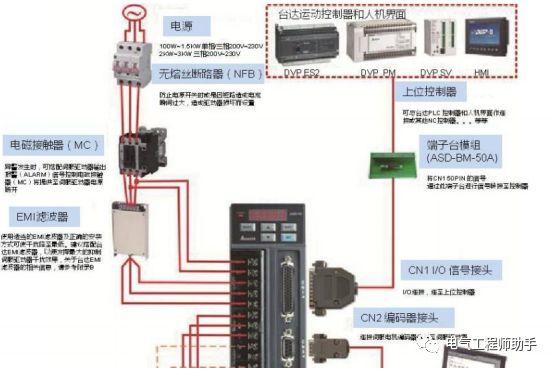
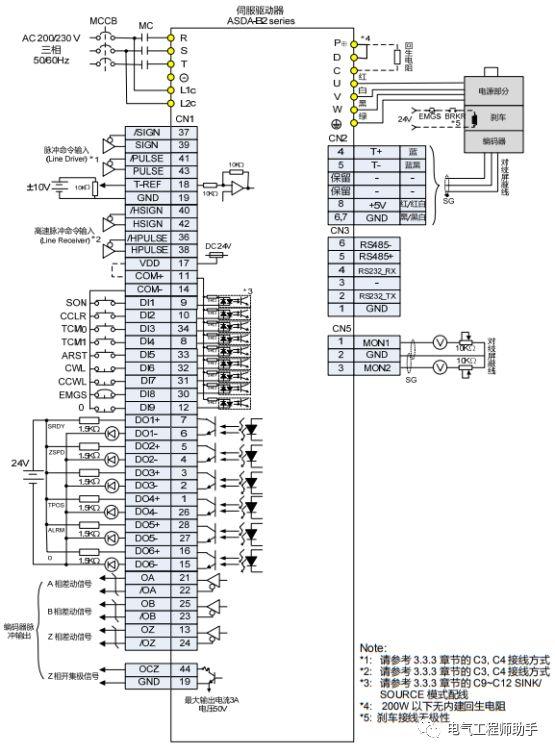
1.伺服各部分及主电源配线
伺服驱动器各部名称

外围设备与主电源环连接

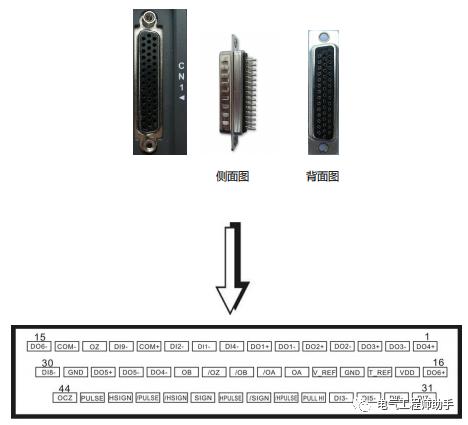
CN1 I/O信号接线
CN1 I/O连接器端子
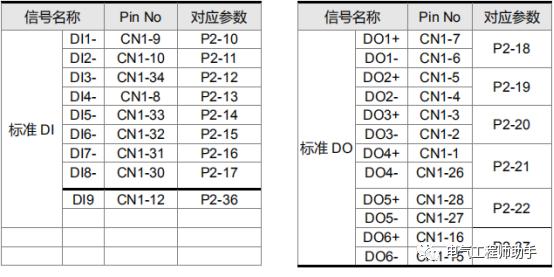
为了更有弹性与上位控制器互相沟通,我们提供可任意规划的6组输出及9组输入。控制器提供的9个输入设定与6个输出分别为参数P2-10 ~ P2-17、P2-36与参数P2-18 ~ P2-22、P2-37。除此之外,还提供差动输出的编码器A+,A-,B+,B-,Z+,Z-信号,以及模拟转矩命令输入和模拟速度/位置命令输入及脉冲位置命令输入。其接脚图如下:

CN1 I/O连接器信号说明
前一节所列的信号,在此详细说明
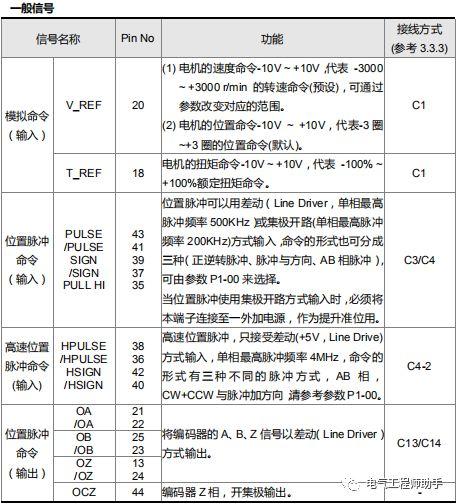

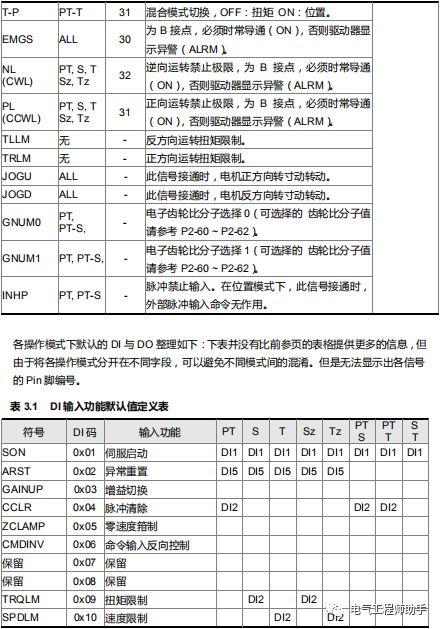
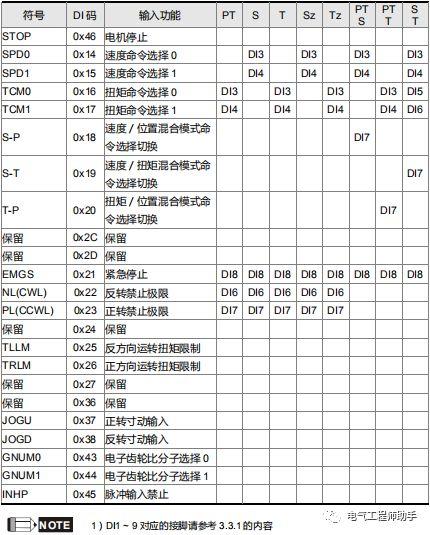
由于本驱动器的操作模式繁多(请参考6.1节),而各种操作模式所需用到的I/O信号不尽相同,为了更有效率的利用端子,因此 I/O 信号的选择必须采用可规划的方式,换言之,使用者可自由选择DI/DO的信号功能,以符合自己的需求。然而,默认的DI/DO信号根据选用的操作模式,已选择了适当的信号功能,可以符合一般应用的需求。
用户必须先根据自己的需要,选择操作模式(各种模式简介请参考6.1节),然后对照下列DI/DO 表,即可知在该模式之下,默认的 DI/DO 信号以及其 Pin No 以利进行接线。
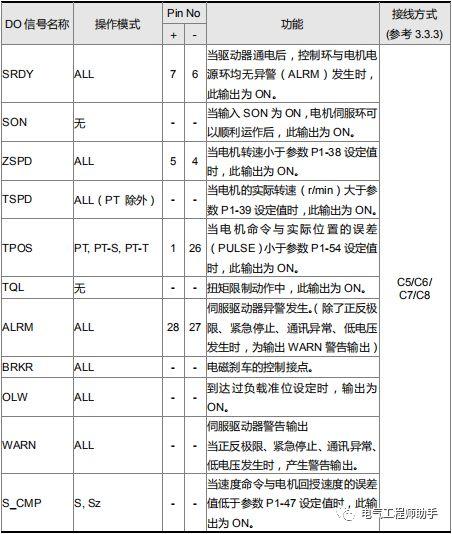
下表列出默认的DI/DO信号功能与接脚编号:
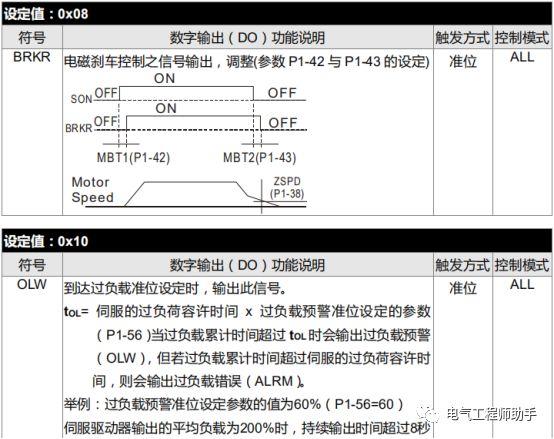
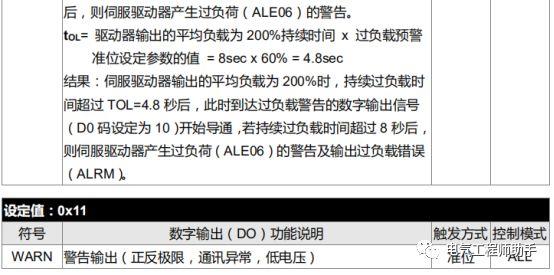
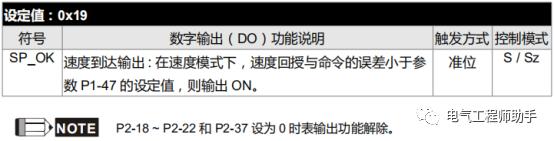
默认DO信号说明如下


用户指定DI与DO信号
如果默认的DI/DO信号无法满足需求,自行设定DI/DO信号的方法也很简单,DI1 ~ 9 与DO1 ~ 6的信号功能是根据参数 P2-10 ~ P2-17、P2-36与参数 P2-18 ~ P2-22、P2-37 来决定的。请参考7.2章节如下表所示,在对应参数中输入DI码或DO码,即可设定此DI/DO的功能。
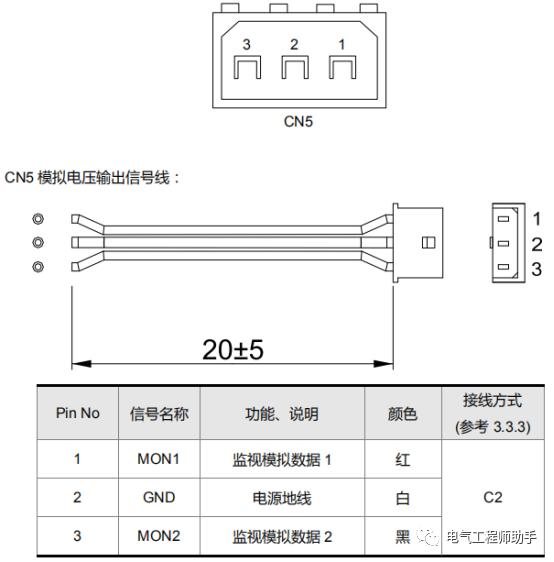
CN5模拟电压输出端子
CN5输出端子提供监视模拟数据,例如电机的运转状态;电机的转速与电流可以用模拟电压的方式来表现。本驱动器提供两个Channel的输出,使用者可以利用参数P0-03来选择所欲监视的数据。本信号是以电源的地(GND)为基准。驱动器CN5输出端子:
伺服驱动器操作模式简介
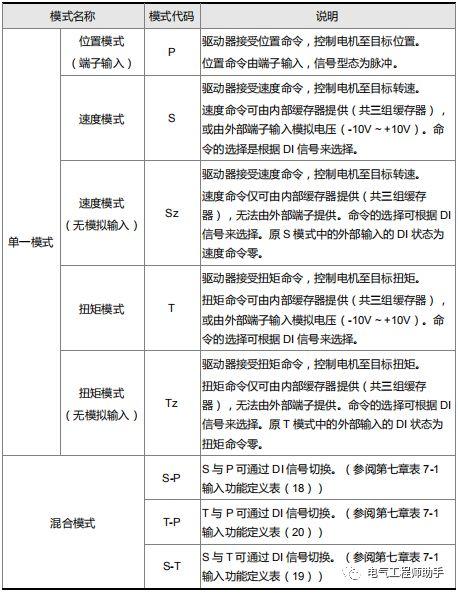
模式的选择可通过参数P1-01来达成,当新模式设定后,必须将驱动器重新送电,新模式即可生效!
2.位置、速度、扭矩模式接线图
位置模式(PT)标准接线图
速度模式标准接线图
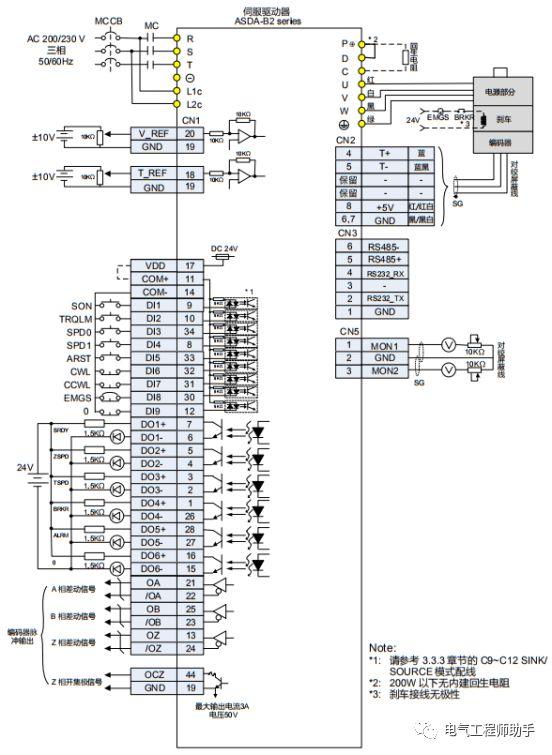
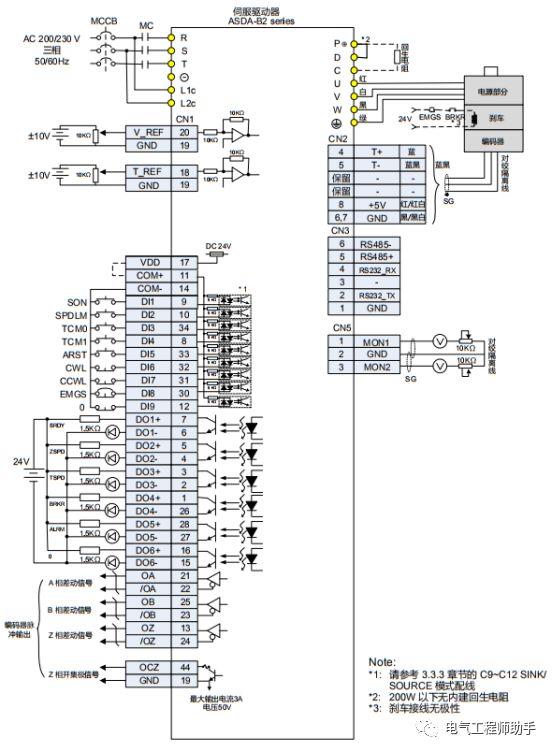
扭矩模式标准接线图
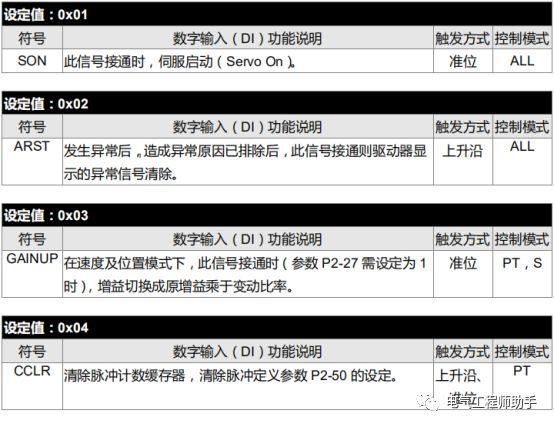
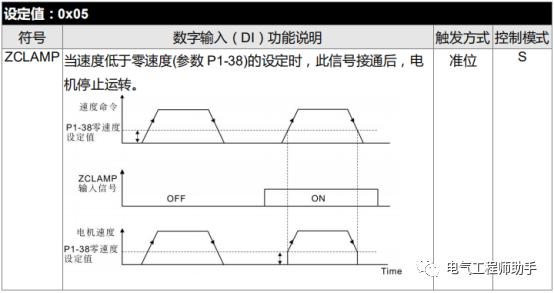
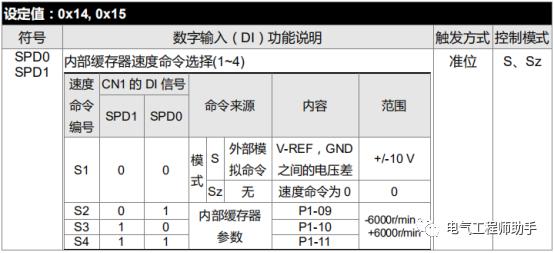
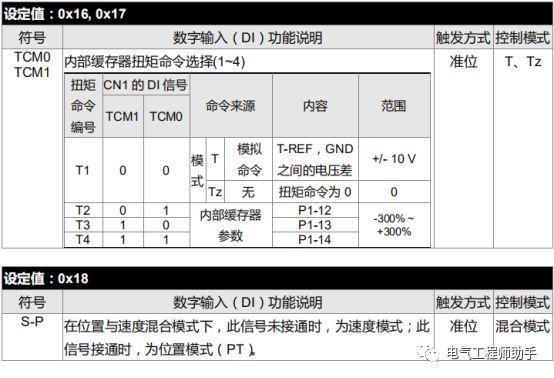
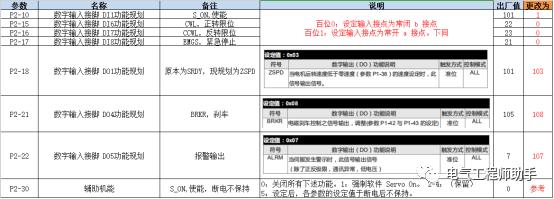
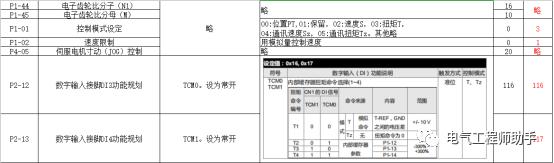
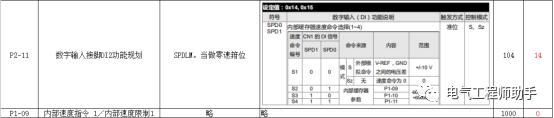
3.伺服的DI/DO针脚规划
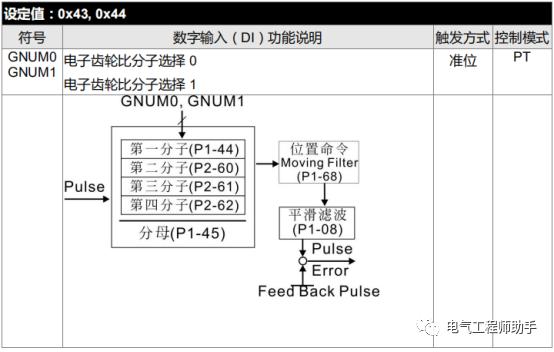
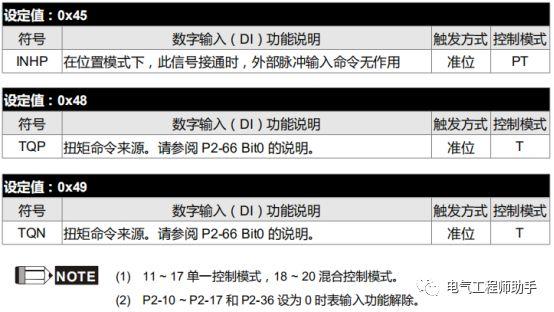
数字输入(DI)功能定义表



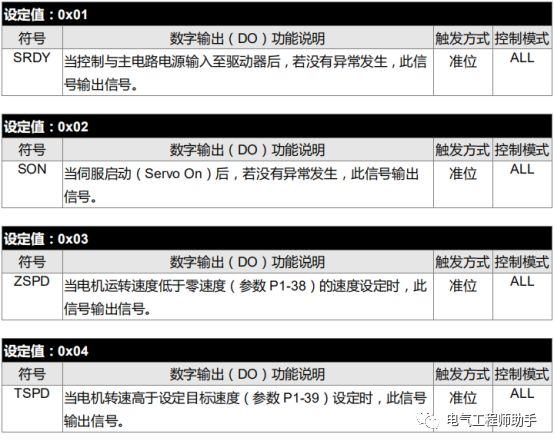
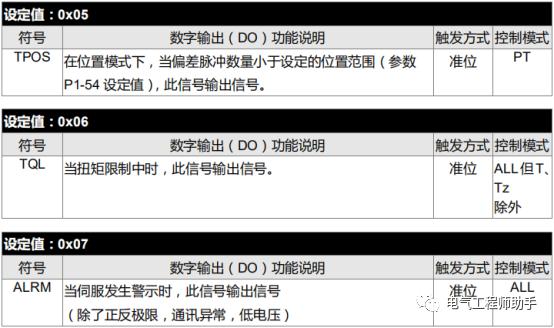
数字输出(DO)功能定义表
4.相关参数设置
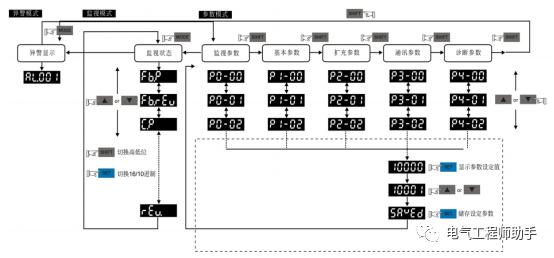
参数设置流程
B2/B2L常用参数设置。
扭矩模式:
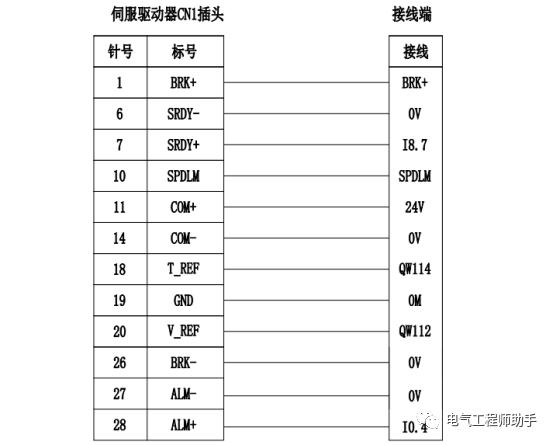
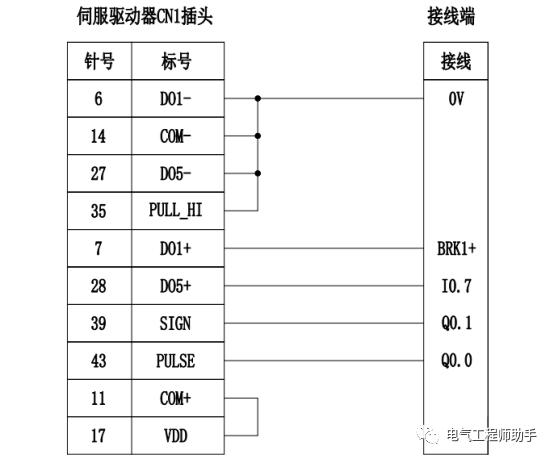
在此规划下,CN1插头做线接线图如图所示
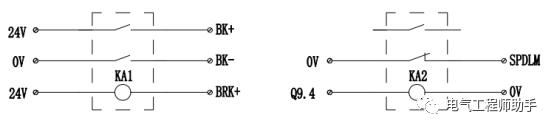
继电器接线图如图所示
位置模式:
需设置的参数为
P2-10(DI1功能规划为使能常闭,参数设为1)、
P2-15(DI6功能规划为正转限位常闭,参数设为0)、
P2-16(DI7功能规划为反转限位常闭,参数设为0)、
P2-18(DO0功能规划为刹车常开,参数设为108)、
P2-22(DO5功能规划为报警常开,参数设为107)、
P1-01(控制模式设定,参数设为0)、
P1-44(电子齿轮比分子N1)、
P1-45(电子齿轮比分母M)、
P4-05(点动JOG)
在此规划下,CN1插头做线接线图如图所示
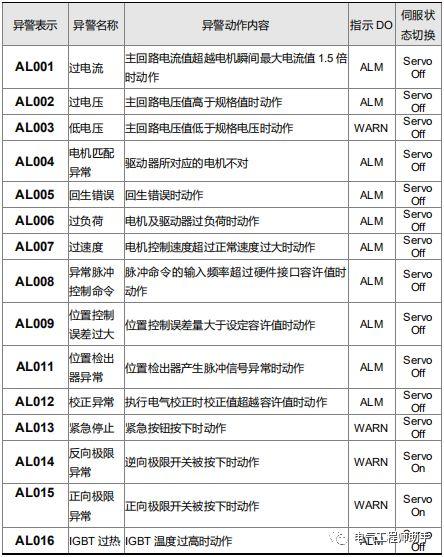
5.报警一览表

The End.
往期文章:
【西门子1200PLC教程】20.PLC变量表的使用
【西门子1200PLC教程】19.S7-1200入门实例
【西门子1200PLC教程】18.使用Portal视图
【西门子1200PLC教程】17.硬件的组态
【西门子1200PLC教程】16.编程软件界面介绍
【西门子1200PLC教程】15.编程软件的安装及设置中文界面
【西门子1200PLC教程】14.程序结构
【西门子1200PLC教程】13.不同存储区的寻址
【西门子1200PLC教程】12.数据的存取方式
【西门子1200PLC教程】11.S7-1200支持的数据类型
【西门子1200PLC教程】10.PLC的工作原理
【西门子1200PLC教程】9.KTP系列HMI面板介绍
【西门子1200PLC教程】8.S7-1200的选型案例
【西门子1200PLC教程】7.CPU的扩展能力
【西门子1200PLC教程】6.CPU面板介绍
【西门子1200PLC教程】5.S7-1200与S7-300的比较
【西门子1200PLC教程】4.S7-1200与S7-200的比较
【西门子1200PLC教程】3.模块的安装
【西门子1200PLC教程】2.CPU家族及模块
【西门子1200PLC教程】1.功能与特点
【笔记】信捷plc应用,通讯篇
【笔记】信捷plc应用,指令篇
【笔记】信捷plc应用,编程前奏篇
【笔记】信捷plc应用,硬件篇
【笔记】三菱FX5U PLC基于ModbusTCP协议与视觉通讯
【笔记】网线制作图文详解
【笔记】两台PLC进行无线通讯
【笔记】西门子S7-200Smart与读卡器、温湿度传感器、扫码枪等设备通讯
【笔记】多台西门子S7-200 Smart通过以太网实现通信
【笔记】ABB机器人零基础编程步骤详解
【机器人篇】ABB、库卡、安川、发那科等工业机器人资源汇总
【电工基础篇】电工电子技术、常用仪器、维修等资源汇总
【触摸屏篇】Proface、威纶、三菱、松下、组态王等资源汇总
【PLC篇】西门子、三菱、松下、欧姆龙等品牌的软件、视频、资料下载
【相关软件篇】485参数配置软件、USB转485模块驱动程序等资源下载
头条号私信回复1,可免费获取海量资源下载链接














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









