






 本文介绍了一种高效地构建连续帕累托前沿的方法,包括离散帕累托求解和连续帕累托解构建两个步骤。通过梯度下降等算法求解帕累托平稳点,并利用Krylov子空间方法构建连续帕累托前沿。
本文介绍了一种高效地构建连续帕累托前沿的方法,包括离散帕累托求解和连续帕累托解构建两个步骤。通过梯度下降等算法求解帕累托平稳点,并利用Krylov子空间方法构建连续帕累托前沿。
八. 连续帕累托解
参考文献:Ma, Pingchuan, Tao Du, and Wojciech Matusik. "Efficient Continuous Pareto Exploration in Multi-Task Learning." arXiv preprint arXiv:2006.16434 (2020).
1. 主要思想
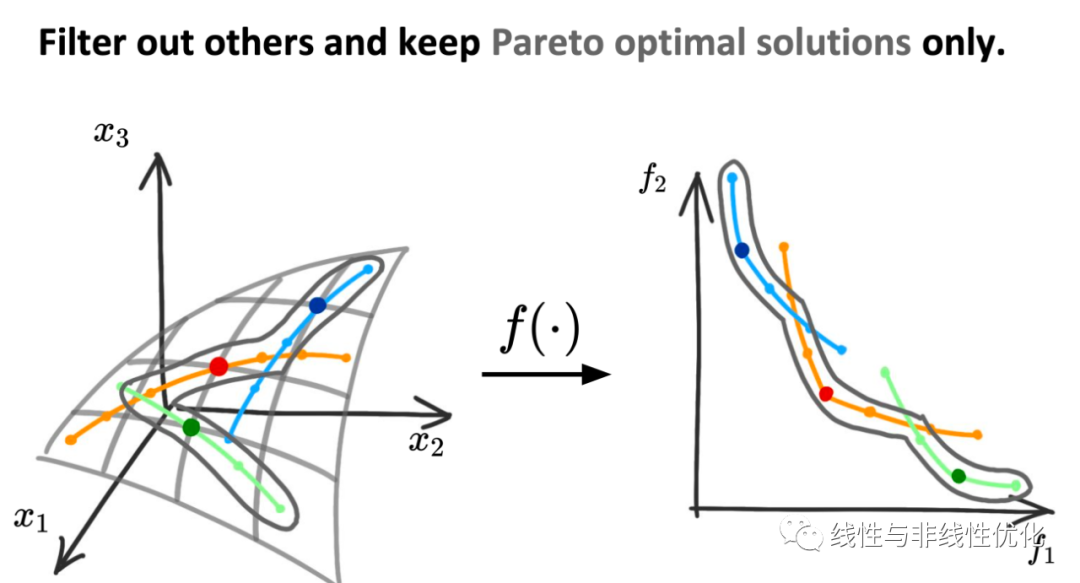
前面我们介绍了单个帕累托解和多个帕累托的求解方法,接下来我们介绍一种能够输出局部连续帕累托解,进一步构建帕累托前沿(Pareto Front)的方法[11]。分如下的两步:
- 离散帕累托求解(本文第4部分): 给定初始点,在求出一个帕累托平稳点后,从过点的平滑曲线切线出发,进行次搜索:计算搜索方向,扩展出平稳点;
- 连续帕累托解(前沿)构建(本文第5部分):由初始点及 扩展出的平稳点集,构建出连续帕累托前沿。
为表述方便,这里引用论文中关于多任务学习的定义:
设光滑,
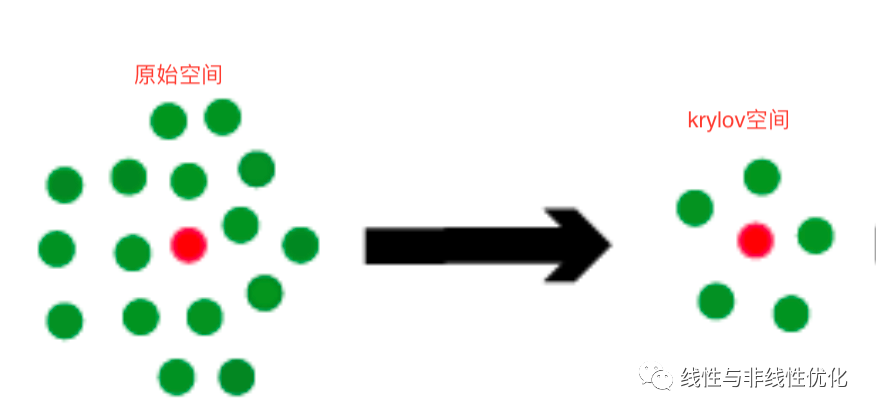
2. 预备知识:Krylov子空间[12]
这一节内容参考潘建瑜老师《线性方程组迭代方法》课程,第四讲 《Krylov 子空间方法 》[12]
大规模稀疏线性方程组 求解的首选方法是Krylov 子空间方法,其基本思想是在一个维数较小的子空间 中寻找近似解.
Krylov 子空间定义:设 , ,我们称
是由 和 生成的 Krylov 子空间, 通常简记为 。Krylov 子空间有如下的3个性质:
- Krylov 子空间嵌套性:;
- 的维数不超过m;
- 为次数小于m的多项式。
简单来说,通过求解Krylov 子空间的解来近似原始线性方程组的解。
3. 基本概念
定义1:帕累托平稳点(Pareto Stationary) : 设连续可微,点称为帕累托平稳点,如果存在, 使得下式成立:
引理2 :帕累托点都是帕累托平稳点。
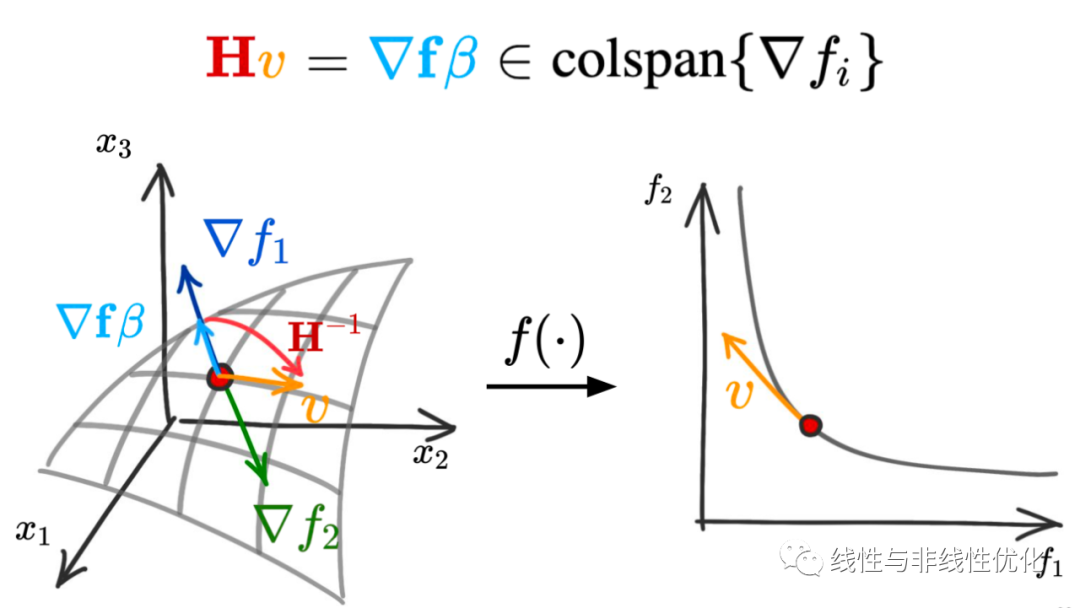
引理3 :设是光滑且是帕累托点,是过点的曲线:
则存在 使得:
其中,为切线上式表明,算子将点处的切向量变换为由扩张成的子空间(Krylov子空间)的向量。
4. 离散帕累托求解
给定初始点,光滑,可以从如下三步来获取连续帕累托解:
- 求解帕累托平稳点: 从初始点出发,通过梯度下降的方法求解帕累托平稳点
- 扩展帕累托平稳点:在点处光滑,如果帕累托前沿存在,则在点处的某个邻域内存在着帕累托平稳点。由此出发,可以求得一系列的帕累托平稳点;
- 将上述的平稳点所在的局部帕累托前沿进行连接合并,扩充成更大的连续帕累托前沿。
我们先来看下如何获取一系列的帕累托平稳点。
4.1 梯度求解方法
这里可以通过前面介绍的梯度求解算法,参考笔者往期文章:
多目标优化(四): 梯度下降算法
多目标优化(七): 多任务之多个帕累托解
4.2 一阶方法扩张
通过梯度求解方法求解出帕累托平稳点后,可以基于该点扩展出局部帕累托集(目标函数光滑)。这一过程可以分解为两步:
- 1).计算:计算式中的;
- 2).求解搜索方向: 估计梯度迭代的搜索方向。
有了搜索方向,可以通过如下更新公式求解:
我们先来看第一步。
1).计算
计算可以归结为求解如下的约束问题:
上述问题规模为,量级较小,可以很方便的求解出来。
2).求解搜索方向
求解得到后,由引理3,我们可以给出待求解的线性方程组:
其中为待求解的变量。上述问题求解有两个难点:
- 不一定是帕累托平稳点
- 问题的复杂度是 ,当n非常大时,求解起来非常困难。
为此引入校正向量(correction vector),将改写为:
式引入了校正向量(correction vector) ,用近似,将会是帕累托平稳点。
引理4:设是问题的解,则问题的解是:
在计算出、帕累托平稳点、校正向量,可以计算出。现在考虑如下的稀疏线性方程组:
为随机生成的向量,为待求解的变量。式可以通过krylov子空间,MINERS方法进行求解。详细MINERS算法可以参考潘建瑜老师《线性方程组迭代方法》课程,第四讲 《Krylov 子空间方法 》[12]
我们来看下寻找离散帕累托解集合的求解算法,如下图所示:
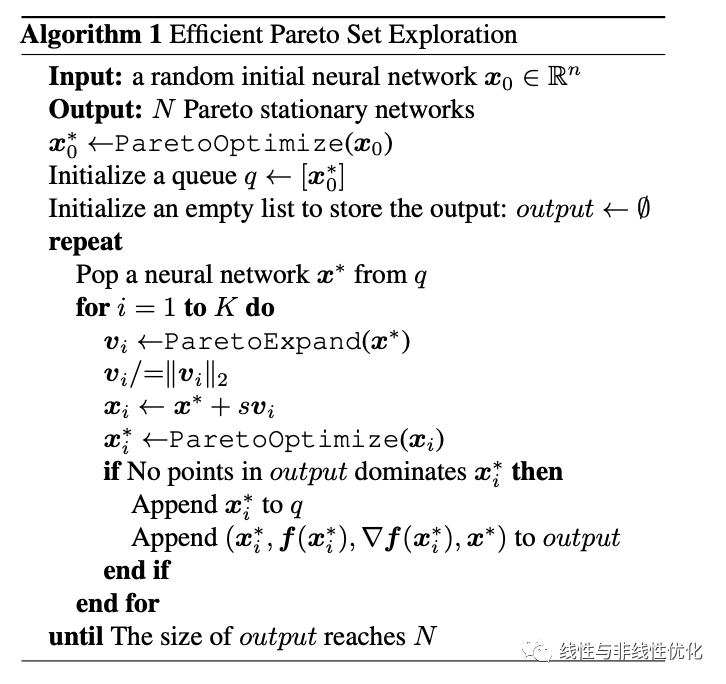
随机初始化网络,输出N个帕累托平稳网络。
- 输入:随机初始化网络
- 生成点的个搜索方向;由个搜索方向扩展出个子网络;
- 更新子网络节点:;
- 输出帕累托平稳点。
- 输出:N个帕累托平稳网络
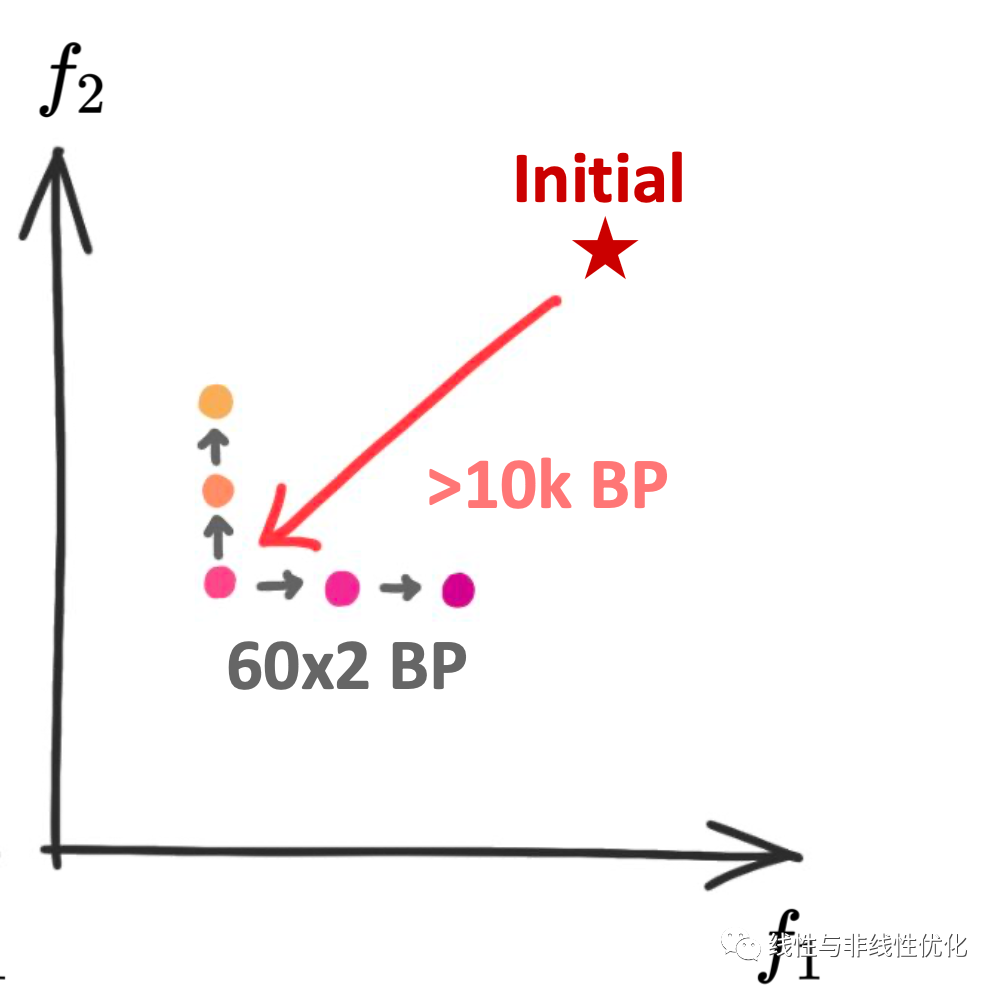
5. 连续帕累托解(前沿)构建
通过前面的Algorithm 1求解出来N个帕累托平稳网络(父节点及K个子网络);接下来介绍如何由离散的帕累托点合并成更大的连续帕累托前沿(Front)。
给定及其对应的K个子节点,定义连续变量 以及搜索方向:
点处的局部帕累托集可以通过下式进行构建:
是由点及对应的K个子节点构成的凸包;切平面中切向量的线性组合仍然在切平面。
对于N个局部帕累托集:
可以将两两接壤处合并成一个更大的局部帕累托集合,全部合并完后,就可以生成多个的连续帕累托前沿(Front)。
参考文献
- [1] [贺莉,刘庆怀 著。《多目标优化理论与连续化方法》。2015-06。科学出版社 ]
- [2] [陈宝林 著。《最优化理论与算法》(第2版)。2005-10。清华大学出版社 ]
- [3] [KKT条件,Karush–Kuhn–Tucker conditions,https://en.wikipedia.org/wiki/Karush%E2%80%93Kuhn%E2%80%93Tucker_conditions ]
- [4] [约束规格,constraint qualifications ,https://en.wikipedia.org/wiki/Karush%E2%80%93Kuhn%E2%80%93Tucker_conditions#Regularity_conditions_(or_constraint_qualifications) ]
- [5] [S.D. Sudhoff. Lecture 9:Multi-Objective Optimization,https://engineering.purdue.edu/~sudhoff/ee630/Lecture09.pdf ]
- [6] [Fliege, J., Svaiter, B. Steepest descent methods for multicriteria optimization. Mathematical Methods of OR 51, 479–494 (2000). https://doi.org/10.1007/s001860000043 ]
- [7] [Désidéri, Jean-Antoine. "Multiple-gradient descent algorithm (MGDA) for multiobjective optimization." Comptes Rendus Mathematique 350.5-6 (2012): 313-318. ]
- [8] [ Gebken, Bennet, Sebastian Peitz, and Michael Dellnitz. A descent method for equality and inequality constrained multiobjective optimization problems. Numerical and Evolutionary Optimization. Springer, Cham, 2017.]
- [9] Sener, O. and Koltun, V. Multi-task learning as multi- objective optimization. In Advances in Neural Informa- tion Processing Systems, pp. 527–538, 2018.
[10] Lin, X., Zhen, H.-L., Li, Z., Zhang, Q.-F., and Kwong, S. Pareto multi-task learning. In Advances in Neural Information Processing Systems, pp. 12037–12047, 2019.
[11] Ma, Pingchuan, Tao Du, and Wojciech Matusik. "Efficient Continuous Pareto Exploration in Multi-Task Learning." arXiv preprint arXiv:2006.16434 (2020).
[12] 潘建瑜《线性方程组迭代方法》课程,第四讲 《Krylov 子空间方法 》http://math.ecnu.edu.cn/~jypan/Teaching/MatrixIter/lect04_Krylov_ssm.pdf

















 1287
1287

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









