







本节要点
- 掌握Label 和 GOTO 指令的使用 -
要点解析
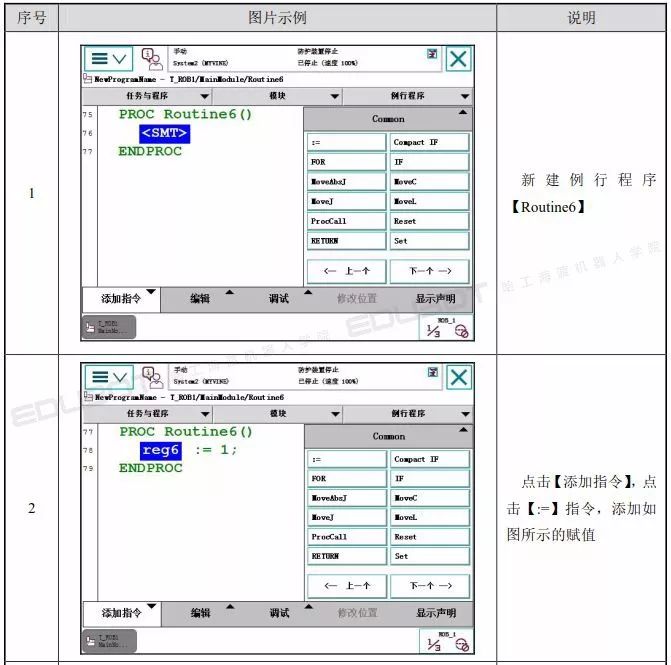
(1)Label 指令。
Label 指令——标签指令,Label 指令和GOTO 指令搭配使用,Label 只是跳转指令的
一个位置标签,通过跳转指令跳转到当前标签位置后继续向下执行。
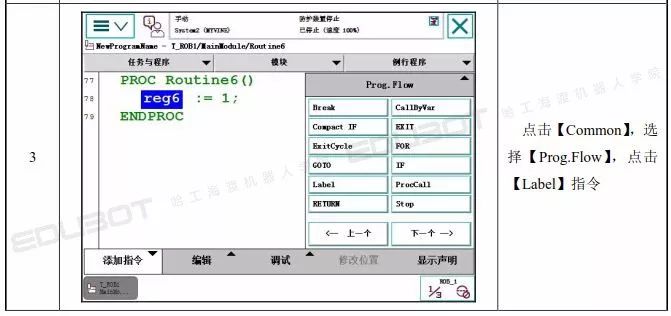
(2)GOTO 指令。
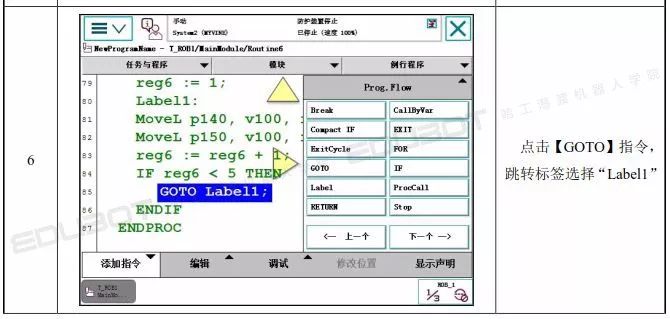
GOTO 指令——跳转指令,即当程序执行到 GOTO 指令时跳转到对应 label 标签下面
程序执行。
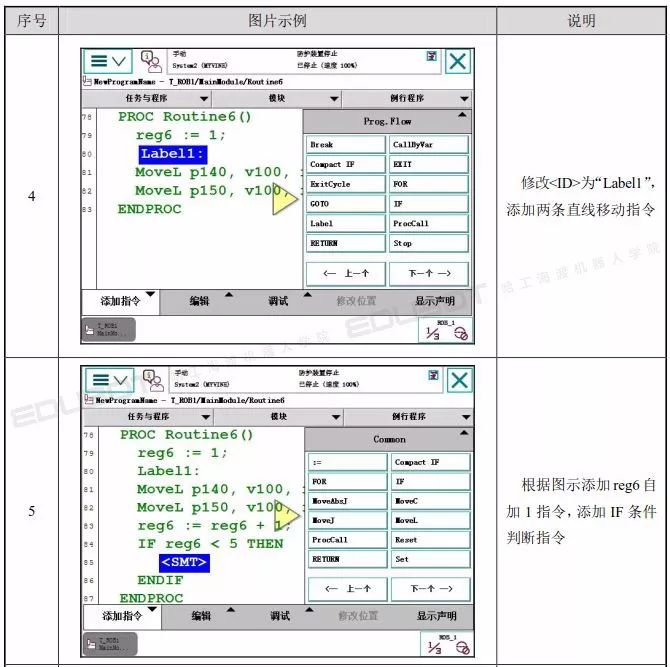
操作步骤
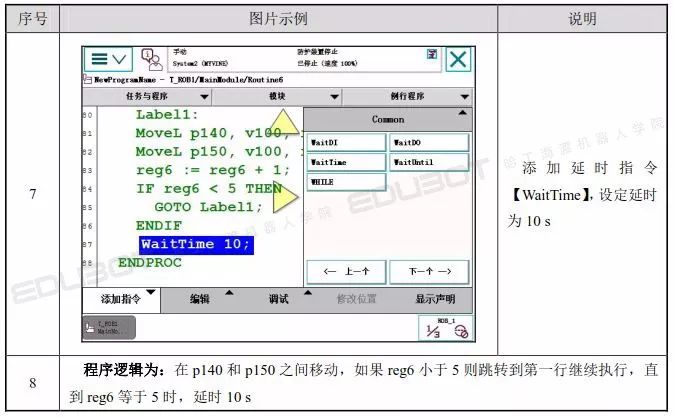
程序编辑的操作步骤见下表。
程序调试
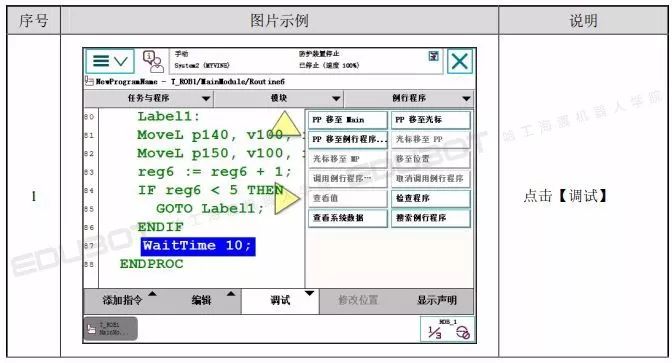
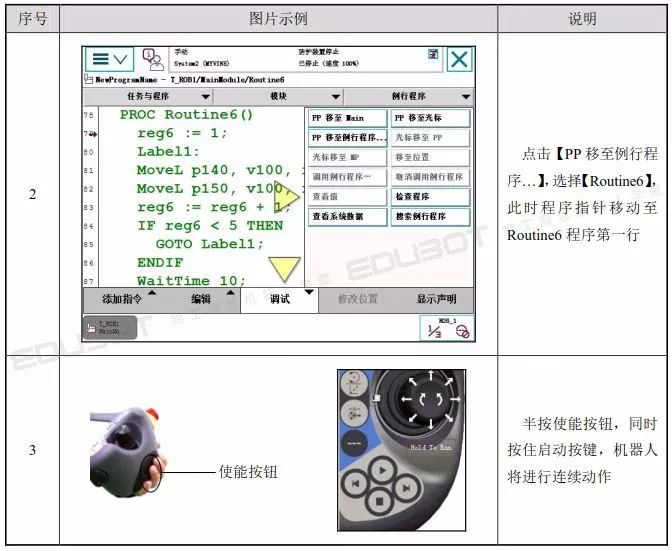
程序调试的操作步骤见下表。

往期内容 ABB机器人
ABB机器人知识点01| IRB 120介绍
ABB机器人知识点02|IRB 120安装
ABB机器人知识点03|示教器概述
ABB机器人知识点04|零点校准
ABB机器人知识点05|动作模式——单轴运动
ABB机器人知识点06|动作模式——线性运动
ABB机器人知识点07|动作模式——重定位运动
ABB机器人知识点08|动作模式小结
ABB机器人知识点09|工作空间
ABB机器人知识点10|运动坐标系
ABB机器人知识点11|工具坐标系定义—— TCP(默认方向)
ABB机器人知识点12|工具坐标系定义——TCP和Z
ABB机器人知识点13|工具坐标系定义—— TCP 和 Z,X
ABB机器人知识点14|工件坐标系定义
ABB机器人知识点15|快捷操作菜单
ABB机器人知识点16 | I/O 硬件介绍
ABB机器人知识点17 | I/O 信号配置
ABB机器人知识点18 |系统I/O配置
ABB机器人知识点19 | 安全信号
ABB机器人知识点20 | 创建模块及程序
ABB机器人知识点21 | 程序数据
ABB机器人知识点22 | 运动指令——MoveJ
ABB知识点23 | 运动指令—— MoveL
ABB知识点24|运动指令——MoveC
ABB知识点25|运动指令——MoveAbsJ
ABB知识点26|速度设置指令
ABB知识点27 | I/O控制指令
ABB知识点28 | 条件指令
ABB知识点29:条件指令——Test
ABB知识点30:循环指令—— WHILE
ABB知识点 31:循环指令——FOR
















 1422
1422











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









