








1.摘要
近年来,深度学习技术,作为一把利剑,广泛地应用于计算机视觉等人工智能领域。如今时常见诸报端的“人工智能时代”,从技术角度看,是“深度学习时代”。光流估计是计算机视觉研究中的一个重要方向,然而,因为其不容易在应用中“显式”地呈现,而未被大众熟知。随着计算机视觉学界从图像理解转向视频理解,互联网用户从发布图片朋友圈转向发布短视频,人们对视频的研究和应用的关注不断增强。光流估计作为视频理解的隐形战士,等着我们去寻找其踪迹。 本文首先介绍了什么是视频光流估计;再介绍光流估计的算法原理,包括最为经典的Lucas-Kanade算法和深度学习时代光流估计算法代表FlowNet/FlowNet2;最后,介绍了视频光流估计的若干应用。希望对光流估计的算法和应用有个较为全面的介绍。
2.介绍
光流,顾名思义,光的流动。比如人眼感受到的夜空中划过的流星。在计算机视觉中,定义图像中对象的移动,这个移动可以是相机移动或者物体移动引起的。具体是指,视频图像的一帧中的代表同一对象(物体)像素点移动到下一帧的移动量,使用二维向量表示。如图2-1。
根据是否选取图像稀疏点进行光流估计,可以将光流估计分为稀疏光流和稠密光流,如图2,左图选取了一些特征明显(梯度较大)的点进行光流估计和跟踪,右图为连续帧稠密光流示意图。
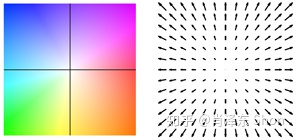
稠密光流描述图像每个像素向下一帧运动的光流,为了方便表示,使用不同的颜色和亮度表示光流的大小和方向,如图2-2右图的不同颜色。图2-3展示了一种光流和颜色的映射关系,使用颜色表示光流的方向,亮度表示光流的大小。
3.算法
最为常用的视觉算法库OpenCV中,提供光流估计算法接口,包括稀疏光流估计算法cv2.calcOpticalFlowPyrLK(),和稠密光流估计cv2.calcOpticalFlowFarneback()。其中稀疏光流估计算法为Lucas-Kanade算法,该算法为1981年由Lucas和Kanade两位科学家提出的,最为经典也较容易理解的算法,下文将以此为例介绍传统光流算法。 对于最新的深度学习光流估计算法,FlowNet的作者于2015年首先使用CNN解决光流估计问题,取得了较好的结果,并且在CVPR2017上发表改进版本FlowNet2.0,成为当时State-of-the-art的方法。截止到现在,FlowNet和FlowNet2.0依然和深度学习光流估计算法中引用率最高的论文,分别引用790次和552次。因此,深度学习光流估计算法将以FlowNet/FlowNet2.0为例介绍。
3.1 传统算法 Lucas-Kanade
为了将光流估计进行建模,Lucas-Kanade做了两个重要的假设,分别是亮度不变假设和邻域光流相似假设。
3.1.1 亮度不变假设
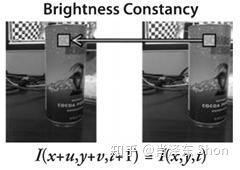
亮度不变假设如图3-1-1,假设待估计光流的两帧图像的同一物体的亮度不变
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1136
1136











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









