





本文内容:状态反馈与状态观测器
操作环境:matlab2019b
一、状态反馈与极点配置
无论是经典控制理论还是现代控制理论,反馈都是系统设计的主要手段。在现代控制理论中首先用的是将状态变量作为反馈的这种方式
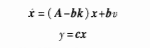
一个系统的动态方程为:

引入状态反馈:

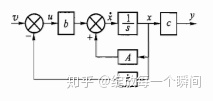
得到闭环系统的状态空间表示式为(其中A-bk为闭环系统矩阵):
状况反馈K阵的影响:
1.状态反馈不影响可控性,但有可能改变客观性
2.状态反馈影响闭环特征根
闭环系统矩阵A-bk的特征值,一般称为闭环的极点,闭环系统的品质主要由闭环的极点所决定,特别是稳定性完全由极点决定。所以通过k阵配置合适的极点,对改善系统的稳定性和品质方面尤为重要
并且,如果一个系统是可控的,闭环系统矩阵A-bk的特征值可以由k阵配置到复平面的任意位置。
matlab求状况反馈K阵
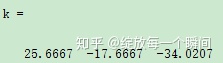
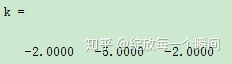
matlab求状况反馈K阵非常的方便,可以用place函数直接求解
例如:

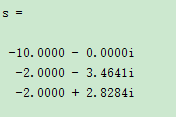
z输出k阵和配置好的闭环特征根:
二、状态观测器
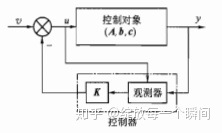
为了实现状态反馈,需要对状态变量的n个分量进行测量。但是在实际系统中,并不是所有的状态变量都能够测量到,所以为了实现状态反馈控制律设计,就要设法利用已知的信息(输出量y和输入量u),通过一个模型来对状态变量进行估计。比如用计算机模拟一个与实际系统具有相同动态方程的模拟系统,用模拟系统的状态向量作为实际系统状态向量的估值。
一般系统的输出量y(t)与控制输入量均为已知u(t),再利用偏差信号来修正输出的估值,就形成了闭环估计方案:
得到状态方程式为:

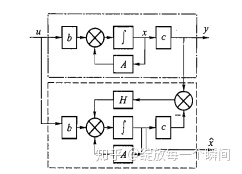
由观测器、状态反馈构成的闭环系统
通常把反馈增益矩阵k和观测器一起称为控制器,并且反馈控制系统的动态特征和观测器的动态特征是相互独立的:
分离定理:
若系统(A,b,c)是可控、可观的,可以先按极点配置选择反馈增益阵k,然后按观测器动态要求选择H,H的选择并不影响配置好的闭环传递函数的极点。因此,系统的极点配置和观测器的配置可以分开进行
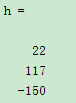
例如:

a运行结果为:


本文为小编自行编程,如有错误还请大家批评指出~
待更新~下一篇为“matlab中控制系统的状态空间分析3”















 3745
3745











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









