






DI-单个数字输入信号
DO-单个数字输出信号
GI-组合输入信号,使用8421码
GO-组合输出信号,使用8421码
AI-模拟量输入信号
AO-模拟量输出信号
注:使用相应的输入输出信号必须配备相应的输入输出板

Cross Connenctions不允许循环
1、所有输入输出板与输入输出信号名称必须唯一,不允许重复;
2、模拟输入输出板上的信号,不能使用脉冲或延迟等功能;
3、每台机器人最多可配置40块输入输出板,每个总线上最多可配20块输入输出板;
4、包括组合输入输出信号,每台机器人最多可定义1024个输入输出信号名;
5、每个输入输出板上最多有64个Byte的输入和64个Byte的输出;
6、在一个Cross Connenctions中最多有5个Actor;
7、不允许将多个信号连接至单个具有信号保持功能的信号,避免造成系统混乱;
8、组合信号的长度最大为16;
9、定义输入输出信号,牵涉到更改系统参数的部分,更改完成后必须热启动机器人使其生效,系统将有提示。
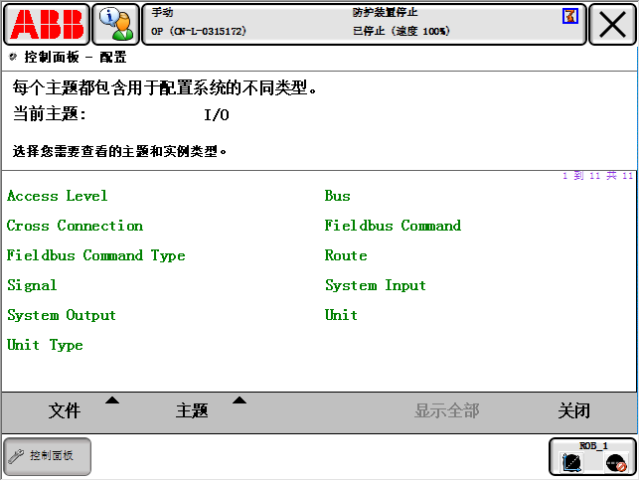
一、定义I/O总线步骤1:在ABB菜单中,单击控制面板打开控制面板窗口;
步骤2:单击配置打开配置窗口;
步骤3:双击BUS;

步骤4:单击添加增加总线;

步骤5:按住Type of Bus选择总线类型(如DeviceNet);

步骤6:按住connector ID选择总线实际安装的位置(如First Board);

步骤7:DeviceNet master address允许值为0-63的整数,用于DeviceNet网络中的其他设备通讯;
步骤8:完成所需配置后点击确定,并在弹出的重新启动对话框中点击是完成定义。
定义完毕需要热启动,否则更改不会生效

步骤1:在ABB菜单中,单击控制面板窗口;
步骤2:单击配置打开配置窗口;
步骤3:双击Unit;
步骤4:单击添加增加单元;

步骤5:单击Name定义输入输出单元名称;
在系统内名称不允许重复,第一位必须为字母,由字母、数字、下划线组成,最长16位字符。
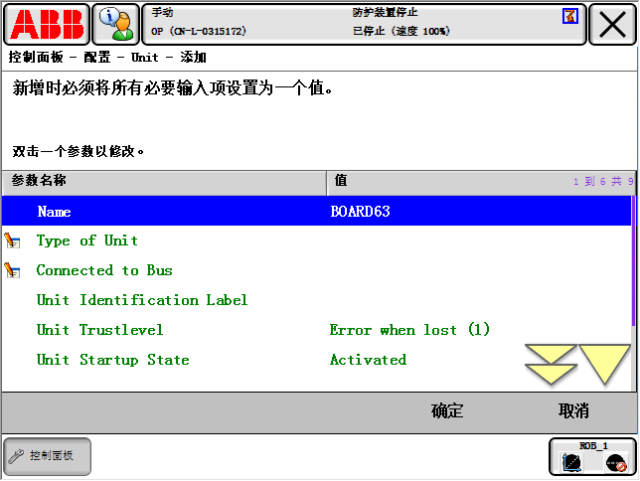
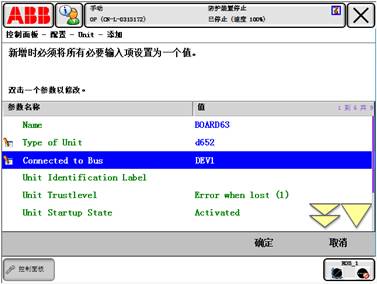
步骤6:按住Type of Unit选择所使用的输入输出板对应的单元类型(如d652);

步骤7:按住connected to Bus选择所使用的输入输出连接的总线名称(如DEV1);
步骤8:按住DeviceNet Lean Address,输入根据输出板上跳线确定的地址;

步骤9:点击Trust Level,选择不同的Trust Level;
步骤10:点击Unit startup state,选择是否使用当前输入输出板;
步骤11:完成所需配置后点击确定,并在弹出的重新启动对话框中点击是完成定义。
定义完毕需要热启动,否则更改不会生效
步骤1:在ABB菜单中,单击控制面板窗口;
步骤2:单击配置打开配置窗口;
步骤3:双击Signal;
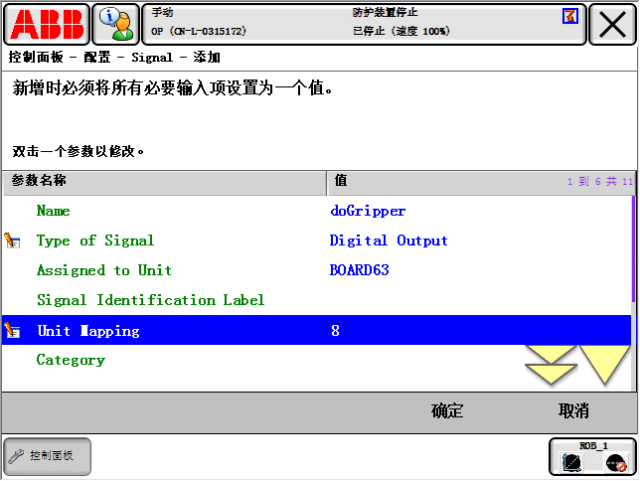
步骤4:单击添加增加输入输出信号;

步骤5:单击Name定义输入输出单元名称;
在系统内名称不允许重复,第一位必须为字母,由字母、数字、下划线组成,最长16位字符;
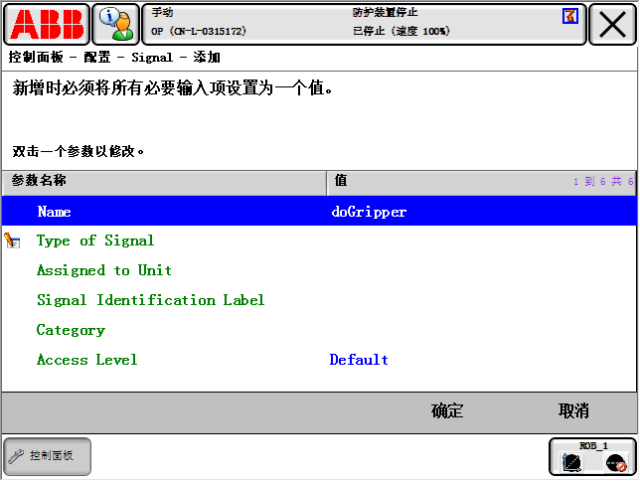
步骤6:按住Type of Signal,根据实际情况来选择输入输出信号的类型;

步骤7:按住 Assigned to Unit ,选择所使用的输入输出信号连接的单元名称(如 BOARD63);

步骤8:按住 Unit Mapping ,根据实际情况来定义信号相应的物理映射端口(与输入输出板的特性相关);
步骤9:按住 Access level,在列表中选择相应的Access level;
步骤10:完成所需配置后点击 确定 ,并在弹出的重新启动对话框中点击 是 完成定义。
DI/GIFilter time passive-低电平保持时间。
按住该选项进入输入窗口,输入相应值。在机器人运动前,输入值 0 必须保持相应时间,单位毫秒,最小10毫秒 ( 默认 ),最大 32 秒。
Filter time active-高电平保持时间。
按住该选项进入输入窗口,输入相应值。在机器人运动前,输入值 1 必须保持相应时间,单位毫秒,最小 10毫秒 ( 默认 ),最大 32 秒。
DO/GOStore value at System Failure and Power fail-信号保持。
YES-开关机热启动后,保持原输出信号值。
NO -开关机热启动后,输出信号值为 0。
Store signal value at Power fail-信号保持。
YES-热启动后,保持原输出信号值。
NO -热启动后,输出信号值为 0。

(文章来源网络,仅供参考。评论处大家可以补充文章解释不对或欠缺的部分)
 Te end
Te end

 免费学习福利
免费学习福利
近期后台收到一些同学的留言,希望小编能分享一些机器人方面相关的资料,今天给大家带来了:三菱、库卡、发那科、安川、ABB以及hlcon视觉等系列机器人学习资料,内容干货满满 。

希望能帮帮助到大家,有需要的同学可直接扫描下方二维码免费领取!!
▼▼
















 3806
3806











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









