






 本文介绍了如何进行ABB机器人工具坐标系的标定,包括选择默认方向、使用标定针进行四点对齐,以及记录和调整坐标值。此外,还详细讲解了工件坐标的标定过程,采用3点法选取关键点,确保工具在工件上的精确定位。
本文介绍了如何进行ABB机器人工具坐标系的标定,包括选择默认方向、使用标定针进行四点对齐,以及记录和调整坐标值。此外,还详细讲解了工件坐标的标定过程,采用3点法选取关键点,确保工具在工件上的精确定位。
工具标定
新建一个工具,打开示教器主面板
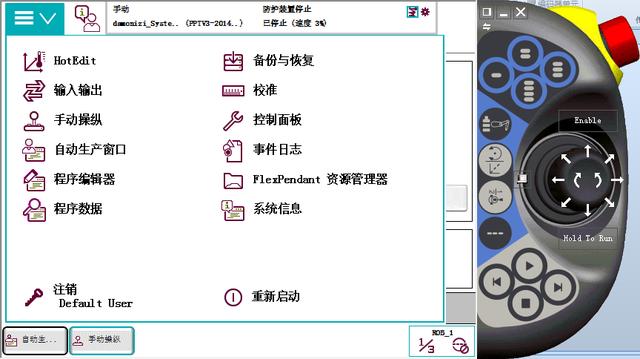
点击手动操作
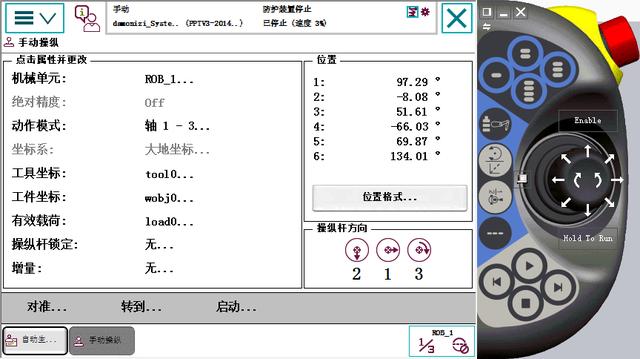
点击工具坐标

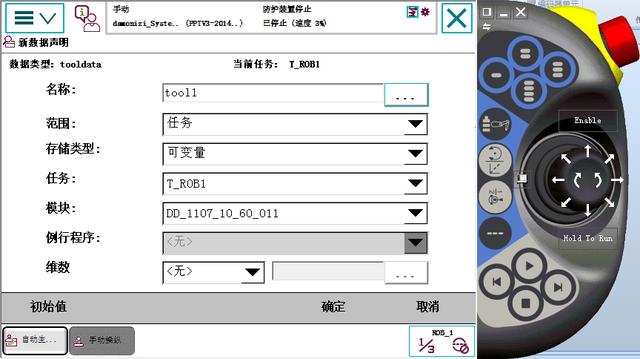
点击新建
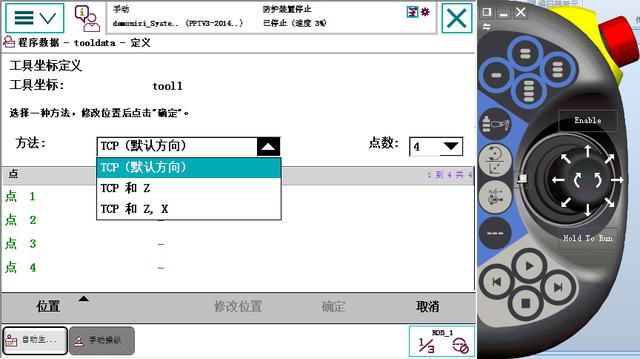
选中tool点击编辑,选择定义
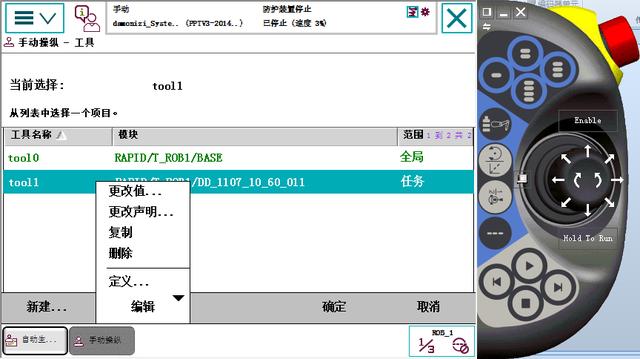
一般工具选择默认方向,点数4
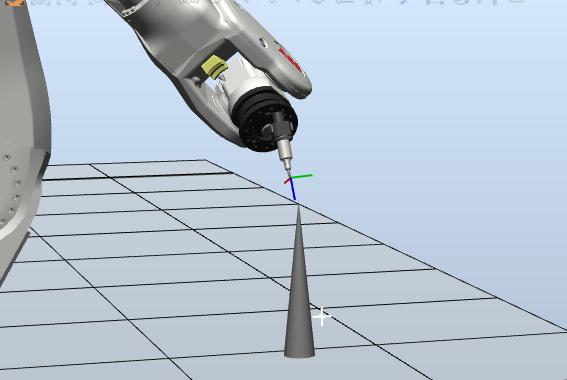
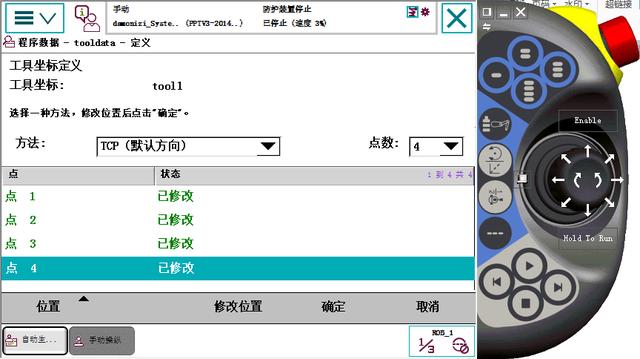
一般是在工具上放一个标定针,然后地上放一个标定针,机器人以四种不同的姿态使针尖对齐,每对准一次就修改位置,直到四个点位置修改完,然后确定
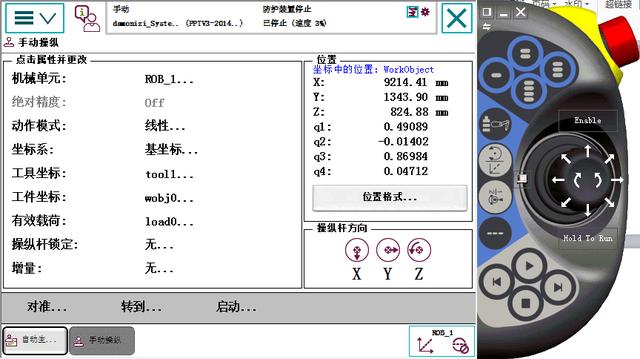
确定出来后,选定当前工具(注意不要移动机器人,保持两个针尖还碰在一起),然后回到手动操作界面,在线性模式下读取X,Y,Z的数值并记录下来
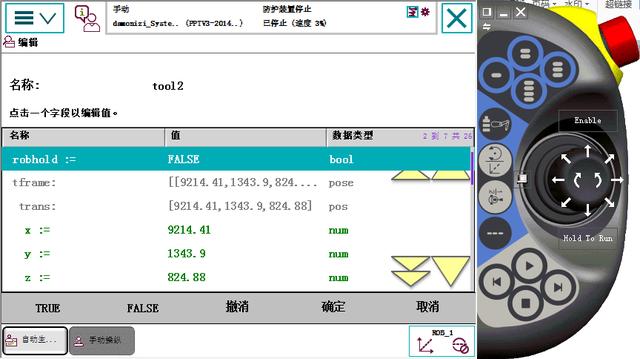
再新建一个tool2,把这个tool2的X,Y,Z值改成刚才记录下数值,然后把robhold改成FALSE,点击确定
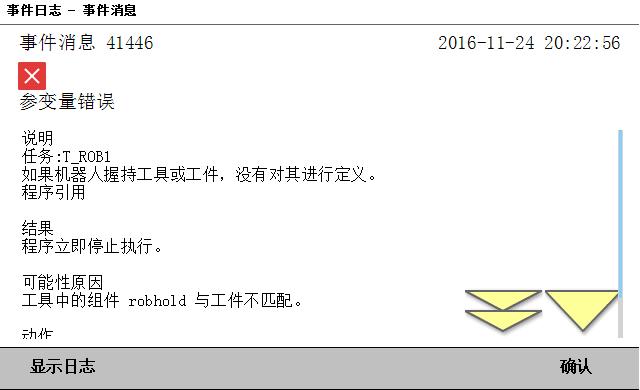
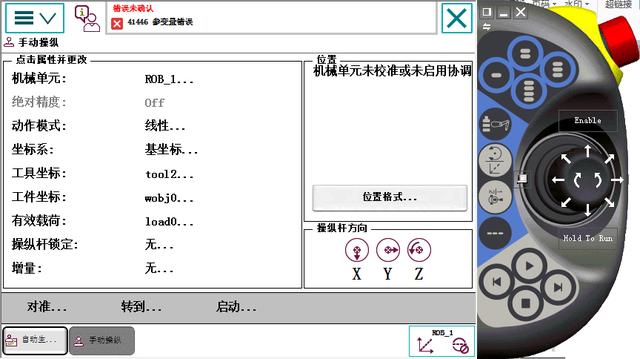
这时会报错,不用管点击确定,然后回到手动操作,点击工件坐标
新建一个工件坐标系,其他都不用改,只改robhold,将其改为TRUE,然后确定

回到手动操作界面,工具坐标系是tool2,工件坐标系是wobj1
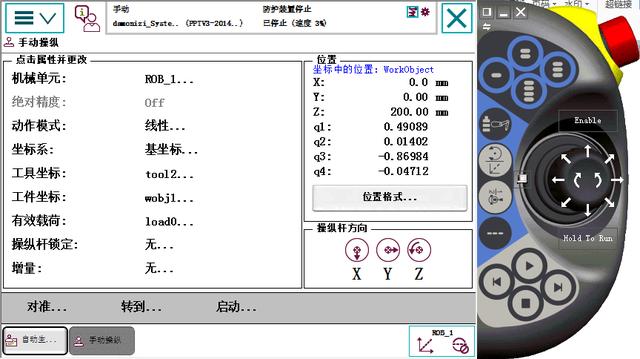
在这个状态下,用你打磨工具想打磨地去碰地上那个标定针,然后读取示教器上的X,Y,Z值,这个值就是你的工具坐标系,最后再新建一个工具,把值输进去就行了,对于对称的工具则只要沿着Z方向偏移就可以。
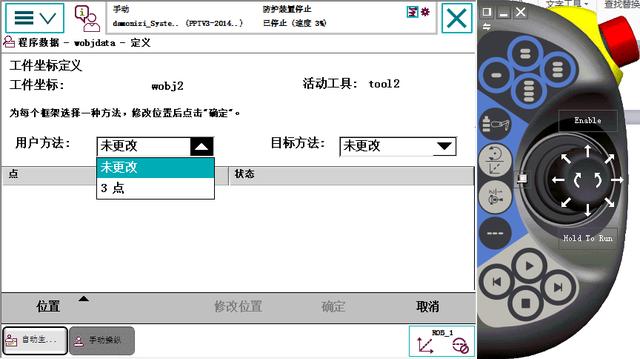
工件标定
先新建一个工件坐标系,选择定义,用户方法选择3点法
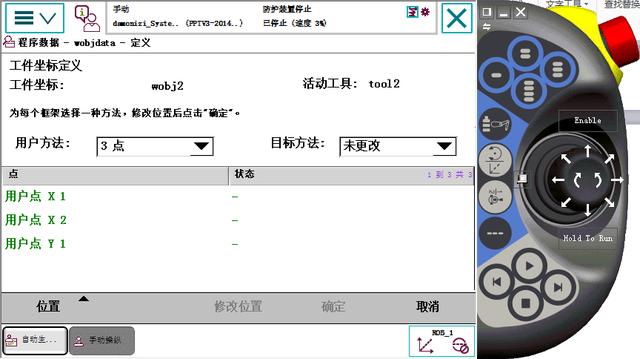
X1和X2就是你的工件X方向上的两个点(一般是沿着工件的边缘)
Y1是工件的Y方向上的一个点
这三个点是用工具标定时,机器人上的标定针选取的,也就是说标定工件时,必须标出一个TOOL,及机器人上的标定针。

















 3989
3989

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









