






视觉SLAM根据传感器硬件可以分为不同的流派,如单目,双目,深度相机等。其中,单目SLAM的难度较其它传感器实现的SLAM要困难许多,原因在于纯粹的单目相机缺乏真实的深度信息,会出现尺度等价性问题。
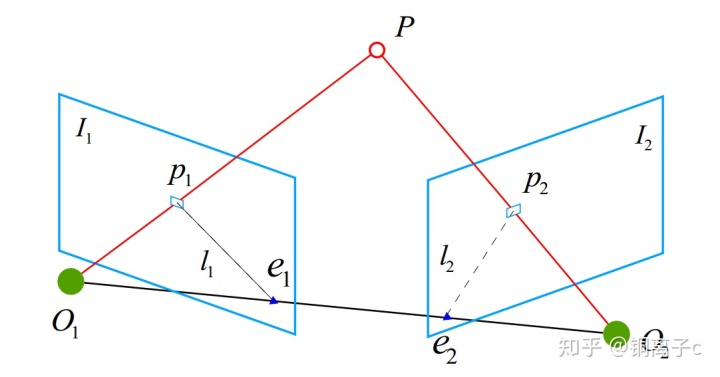
单目相机的初始化往往由对极几何约束完成。对极几何约束应用的场景是已知两幅图像之间若干匹配点,求解两幅图像之间的相机运动,是一个2D-2D的问题。详细的推导过程可以参考《视觉SLAM14讲》中的过程,其核心求解是一个本质矩阵E(或者带有内参矩阵的基础矩阵),本质矩阵E的特点是具有尺度等价性。位姿R和t是由E通过奇异值分解得到的,其中R是正交矩阵,其逆等于自身的转置,相当于自身的约束可以克服掉尺度等价性;但是t没有办法克服尺度等价性,即这个t乘上任意一个非零的正数,都能满足对极几何约束。
通常的初始化做法是,将t归一化,让其长度等于1,并作为单位计算相机的运动和图像特征点对应的3D点位置。初始化之后,便可以利用3D-2D的PnP方法,求解后续相邻帧的运动位姿。
至于这个长度1对应到真实世界中的长度可能是5cm,也可能是40m,这就需要额外的深度信息介入进行确定,这个以t的长度作为单位的尺度世界只和真实世界之间相差一个尺度因子。















 2157
2157











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









