






1.ORB-SLAM3
body pose

陀螺仪偏置

加速度计偏置

状态向量

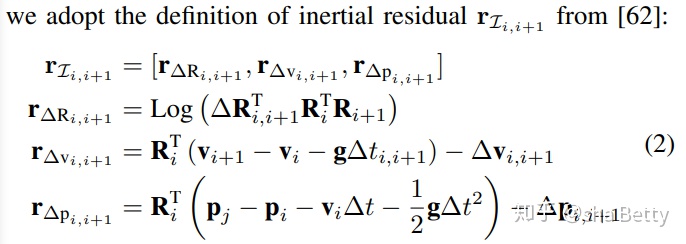
对预积分得到选择,速度和位置:



1.ORB-SLAM3
body pose
陀螺仪偏置
加速度计偏置
状态向量
对预积分得到选择,速度和位置:
 803
2102
9439
2691
803
2102
9439
2691











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















