本文为摄测与CV系列概述文章第三章。
雪耕君:摄影测量概述zhuanlan.zhihu.com
第三章 共面方程,相对定向,绝对定向
目录
- 摄影测量共面方程
- 相对定向
- 绝对定向
- 由共面约束导出的对极几何
- 本质矩阵,基础矩阵,单应矩阵
摄测:
针对第二章中图七(前方交会)的情况,在我们没有
![]()
,
![]()
两像机的外方位元素的时候也并非无能为力。我们可以通过同名像点来确定两张像片的空间相对位置姿态,使得同名光线对对相交,即
相对定向(relative orientation)。同名像点指的是不同像片上对应同一物点的像点。而同名光线指的是由光心到同名像点的射线,两同名光线理论上交于物点。
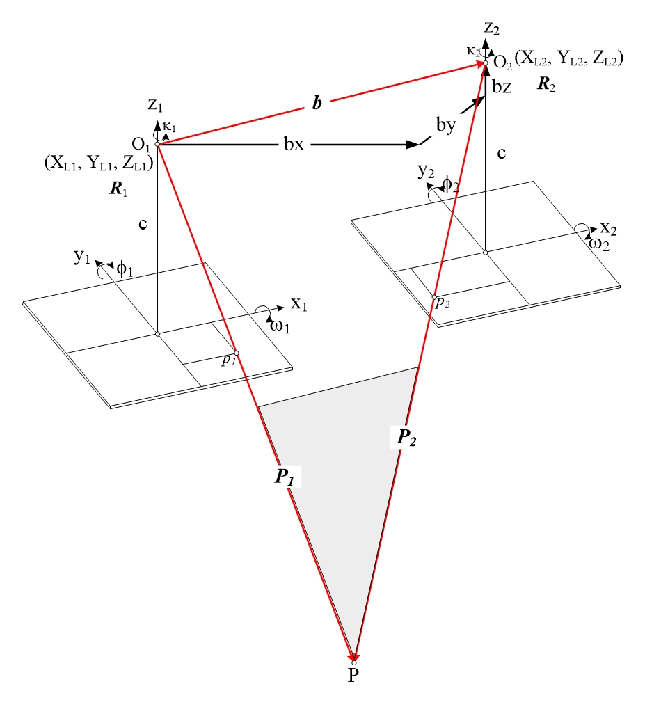
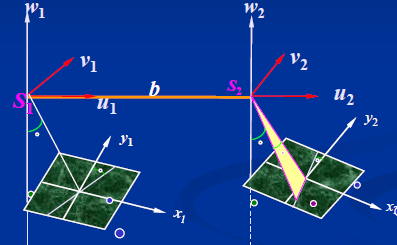
图九 共面约束示意
如图九所示,我们称两相机中心连线
![]()
为摄影基线(baseline),
![]()
,
![]()
,
![]()
共面(同名光线相交),亦即
![]()
,
![]()
,
![]()
共面, 故有向量混合积为0:
等价于以下行列式为零:
其中
![]()
为基线分量(即外参相对平移),而
![]()
为左像点在像空间辅助坐标系下坐标,
![]()
为右像点在像空间辅助坐标系下坐标。该式即称为
共面方程(coplanarity equation),可见,一对同名点可以列出一个共面方程式
。 共面方程是摄影测量又一大重要方程。
其中,
代入共面方程,可见当相机内参及同名像点坐标
![]()
已知时,共面方程可以用于解求相机外参。
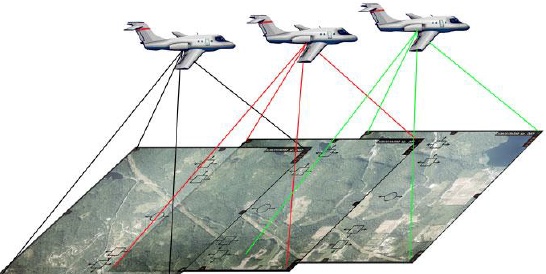
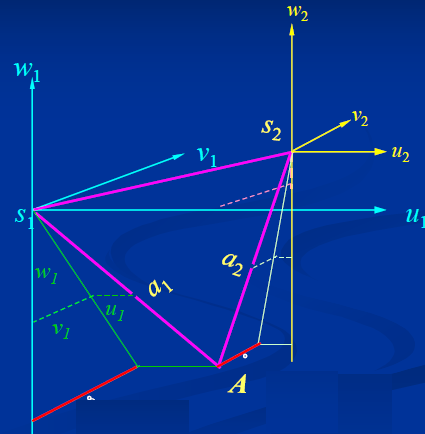
相对定向有两种方案,第一种是连续像对相对定向,如图十所示。
图十 连续像对相对定向示意
其思想是固定左像片,调整右片方位姿态使同名光线对对相交。左像点
![]()
已知或可以预设(比如全设为0),
![]()
可求。右像点
![]()
未知,
![]()
可由其确定。 于是共面方程与5个未知数相关
![]()
(若不考虑尺度则
![]()
确定两个就行了,以确定相互之间的比例,一般取
![]()
为固定值,
![]()
为未知数)。这五个未知数可构成
相对定向参数。相对定向构建的是一个空间无尺度的三角形,自由度(待求独立参数个数)为5。
进一步想,对于一条满足重叠要求的航带,利用连续像对相对定向,我们可以连续地恢复像片们与第一张像片的相对关系,把航带像片统一到第一个像空间辅助坐标系里,可形象理解为把许多张像片拼接成一张大像片。这也被称为航带法空中三角测量。注意到各模型之间的比例尺是不同的(由
![]()
确定),故在连续像对模型连接过程中要统一比例尺,称为
比例尺归化,通过三度重叠连接点(连续三张像片上都出现的同名点)完成。
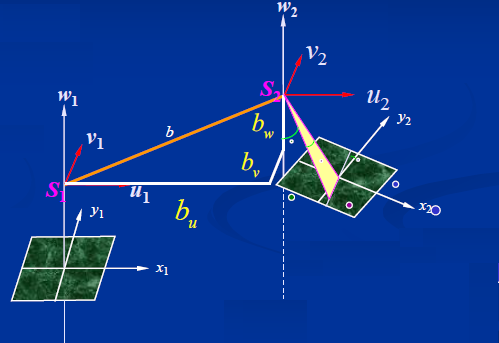
另一种是单独像对相对定向,如图十一所示:
图十一 单独像对相对定向示意
这种方案的思想是通过左右像片相对运动使同名光线对对相交。以摄影基线为基础建立像空间辅助坐标系即
![]()
,
![]()
(实际操作中会取
![]()
为某对同名点x坐标之差),固定左片摄影主轴不绕基线旋转即








 本文为摄测与CV系列概述文章第三章。雪耕君:摄影测量概述zhuanlan.zhihu.com第三章 共面方程,相对定向,绝对定向目录摄影测量共面方程相对定向绝对定向由共面约束导出的对极几何本质矩阵,基础矩阵,单应矩阵摄测:针对第二章中图七(前方交会)的情况,在我们没有 , 两像机的外方位元素的时候也并非无能为力。我们可以通过同名像点来确定两张像片的空间相对位置姿态,使得同名光线对对相交,...
本文为摄测与CV系列概述文章第三章。雪耕君:摄影测量概述zhuanlan.zhihu.com第三章 共面方程,相对定向,绝对定向目录摄影测量共面方程相对定向绝对定向由共面约束导出的对极几何本质矩阵,基础矩阵,单应矩阵摄测:针对第二章中图七(前方交会)的情况,在我们没有 , 两像机的外方位元素的时候也并非无能为力。我们可以通过同名像点来确定两张像片的空间相对位置姿态,使得同名光线对对相交,...
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 5943
5943











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









