







前言
上一篇围绕卡尔曼滤波算法的参数选取问题展开,针对非线性对象的状态估计问题,阐述扩展卡尔曼滤波(EKF)与卡尔曼滤波的区别以及扩展卡尔曼滤波算法的核心步骤。本篇将结合实际案例进行详解,同时,提供一种扩展卡尔曼滤波算法的C++代码实现方案。
扩展卡尔曼滤波实例
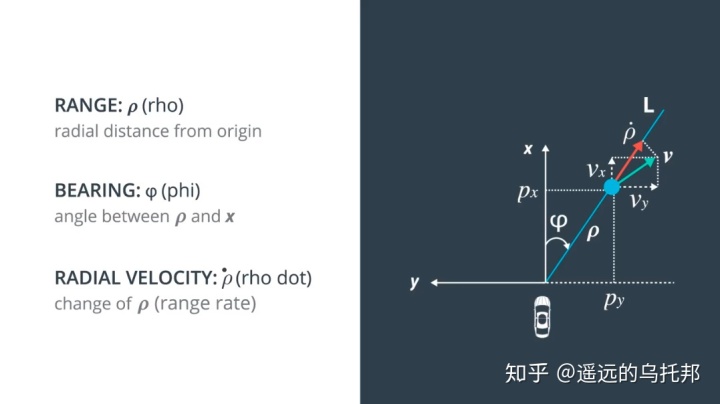
这里以无人驾驶的测量障碍物的实际案例为例子展开,如下图所示,毫米波雷达能够测量障碍物在极坐标下离雷达的距离
- 预测更新
以二维匀速运动为例,这里的状态量
根据牛顿运动定理,经过
对于二维的匀速运动模型,加速度为0,并不会对预测后的状态造成影响,因此令
由此可得状态转移矩阵为
毫米波雷达测量障碍物在径向上的位置和速度相对准确,不确定度较低,因此可以对状态协方差矩阵P进行如下初始化:
由于Q对整个系统存在影响,但又不能太确定对系统的影响有多大。对于简单的模型来说&#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









