







一, PointNet存在的问题和作者的改进
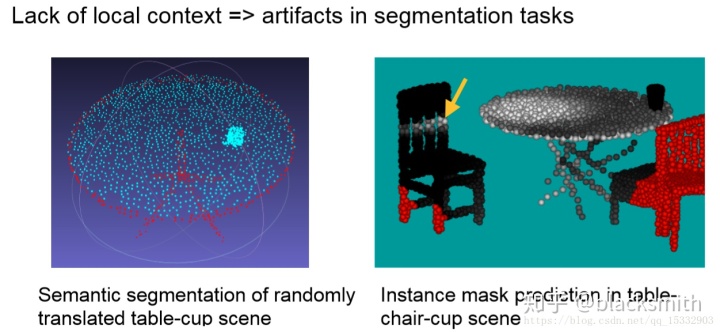
pointnet只是简单的将所有点连接起来,只考虑了全局特征,但丢失了每个点的局部信息,如下图(以点云分割为例):
改进方法:
1)利用空间距离(metric space distances),使用PointNet对点集局部区域进行特征迭代提取,使其能够学到局部尺度越来越大的特征。
2)由于点集分布很多时候是不均匀的,如果默认是均匀的,会使得网络性能变差,所以作者提出了一种自适应密度的特征提取方法
二.网络结构:
2.1 针对局部特征提取的设计思路:
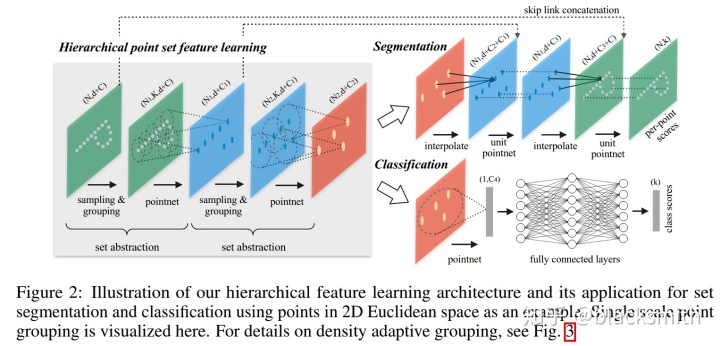
PointNet++需要解决两个关键的问题:第一,如何将点集划分为不同的区域;第二,如何利用特征提取器获取不同区域的局部特征。pointnet++使用了分层抽取特征的思想,把每一次叫做set abstraction。分为三部分:采样层、分组层、特征提取层。 其中采样层和分组层解决第一个问题, 特征提取层解决第二个问题
1). 采样层(Sample layer)
首先来看采样层,为了从稠密的点云中抽取出一些相对较为重要的中心点,采用FPS(farthest point sampling)最远点采样法,这些点并不一定具有语义信息。当然也可以随机采样;文中提到相比于随机采样,这种方法能更好的的覆盖整个点集。具体选择多少个中心点,数量怎么确定,是由人来指定的。
2).组合层(Grouping layer)
在上一层提取出的中心点的某个范围内寻找最近个k近邻点组成patch;这一层使用Ball
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 810
810











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









