






川崎机器人故障排除参考方法
首先,第一时间做好系统数据备份工作。了解故障现象,通过现场一些设备的基本现象和现场技术人员的描述进行判断,会比较有效率,。
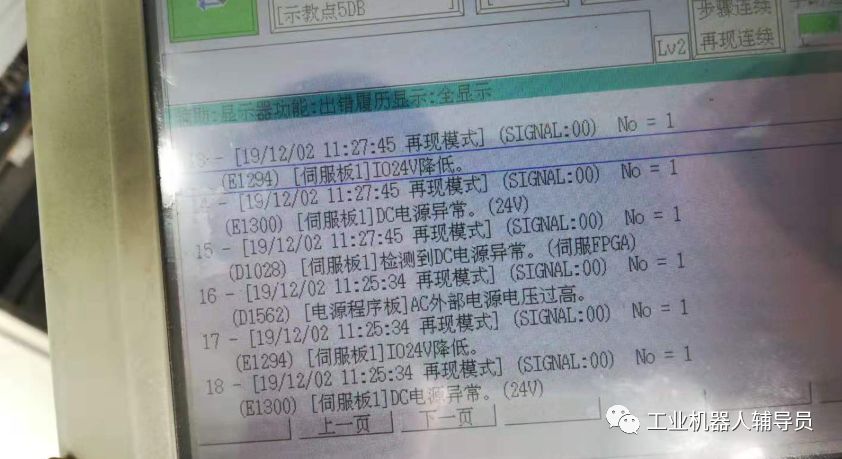
例如,根据一位现场工程师的描述 “ 川崎控制器偶发会产生自动重启现象,这个重启过程中会看到快要启动时,又关了机。经过反复重启后,终于有一次成功启动 ” 。根据系统日志履历信息我们可以看到一些蛛丝马迹。系统一般会报出比较的多故障代码时,我们首先要判断哪个是直接的和间接的故障提示信息,找出真因。比如下图的一些故障信息。
如果现场要判断这些信息需要对故障代码有一些常识,方便判断。
当发生预设的错误时,该错误的代码及其提示信息就会显示在TP屏幕上,并按其状态和严重程度可分为以下四种类型。
错误代码通常以 P、W、E、或 D开头(代表错误类型) ,后面接 4为数字编号。 比如图中的E1294,下面是每个字母对应的严重程度分类。
1. P:操作错误
由操作错误而引起,该类错误不影响机器人的运动。
例如: “P0126 非法的开关名称。 ”
2. W:警告
这不算是出错,但不解决会引起错误。
例如: “W1013 编码器电压低。 ”
3. E:微小故障
此类微小故障,如果引起错误的原因已被清除,可以通过错误复位功能就能恢复,无需开/关控制器电源。
例如: “E1082超出运动范围的绝对下限值。”
4. D:严重故障
这种严重故障涉及硬件、软件或周边装置,不能通过错误复位功能来恢复;它的恢复需要关断并重新开启控制器电源。
例如:“D1528 控制器温度超限。”
返回头看下故障图中故障级别最高的是D字开头的1028和1562,而E字开头则为间接性故障信息提示,E字开头大部分都可以复位。
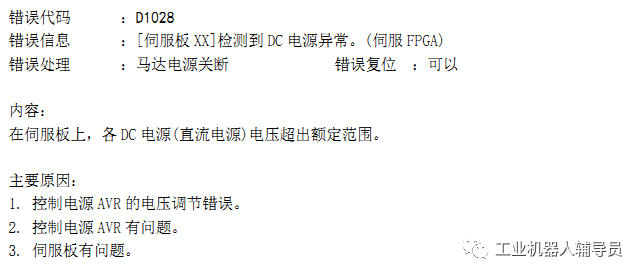
重点检查故障代码D1028和1562,找到故障信息手册中D1028
再看下D1562
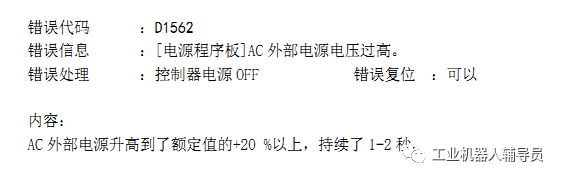
通过这些信息基本可以判断为AVR稳定电源电压问题。AVR(自动电压调节器)是一种密封电子装置,他自身附有并联补偿电源功能。两种情况:一是自身电源板路稳压电路部分出了问题;二是外部(工厂电压不稳定)电源电压异常;
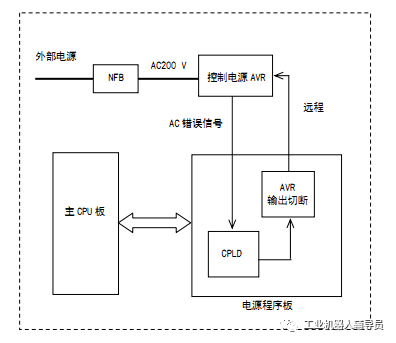
经过测量外部电压约228伏,在98~235.4V范围之内,属于正常现象。由此可以判断为AVR偶发输出了不稳定电压。
注意:需要进行更换AVR的前提是连接器线路口都是正常的。
更多信息
关于ABB机器人系统参数– MOC.cfg
ABB IRC5P涂装示教器功能详解
两台机器人干涉区的工作流程参考
ABB机器人视觉抓取程序案例参考
工业机器人故障管理与预防性工作
ABB机器人码垛包位置调整参考
KUKA程序写法案例分享(专业版)
川崎码垛主程序案例1—左右侧条件判断
库卡程序案例参考
关于安川机器人平衡气缸故障现象
关于安川机器人平衡气缸维护要点参考
FANUC机器人故障 SRVO-062解除方法
FANUC机器人电机编码器分析(图解)
FANUC机器人负载手动设置方法参考
安川机器人并行IO分配 (查询)
工业机器人电气设计元件选取规则参考
安川电机与伺服放大器电路接线图
ABB机器人减速机漏油检漏测试
ABB机器人紧凑型控制柜内部结构(图)
KUKA机器人CCU板信号指示灯(从颜色判断状态)
工业机器人伺服电机故障分析
工业机器人电气设计元件选取规则参考
FANUC机器人抓取程序案例
FANUC机器人伺服放大器LED故障诊断(图文)
库卡机器人蓄电池在线检测方法
FANUC机器人主板启动加载过程状态(故障分析)
工业机器人可靠性功能测试与分析
工业机器人撞人事故的真因背后
kuka机器人平衡缸异常噪音消除方法
谐波减速机更换所需工具
如果我是销售,坚决不卖给这样的客户!
库卡机器人 CCU板卡接口功能与保险丝作用(图文)
UR机器人如何释放抱闸的
ABB机器人紧凑型控制柜内部结构(图)
FANUC机器人零点快速校准流程
感谢关注,有问题请留言!

















 3935
3935

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









