






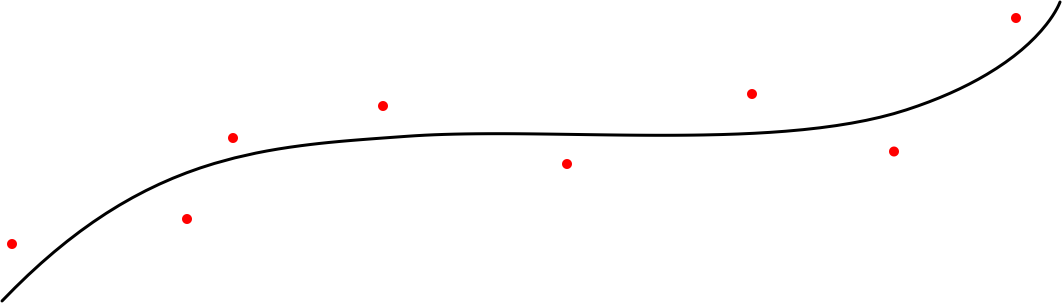
场地自动驾驶一般需要录入地图,地图在采样的过程中难免会存在噪声,不宜直接作为路径输入到自动驾驶控制器中。怎么样将一堆离散的不平滑的采样点转化成平滑的路径是值得研究的问题。
首先我们做出如下建模,假设x和y分别满足下列方程,其中s为路径路径长度和
柳梦璃:MATLAB路径规划算法中提到的FrenetSerretSystem坐标系是一回事。
下面定义一下优化的目标如下,其中l为待优化路径长度,
假设我们采样到到的点坐标为
场地自动驾驶一般需要录入地图,地图在采样的过程中难免会存在噪声,不宜直接作为路径输入到自动驾驶控制器中。怎么样将一堆离散的不平滑的采样点转化成平滑的路径是值得研究的问题。
首先我们做出如下建模,假设x和y分别满足下列方程,其中s为路径路径长度和
柳梦璃:MATLAB路径规划算法中提到的FrenetSerretSystem坐标系是一回事。
下面定义一下优化的目标如下,其中l为待优化路径长度,
假设我们采样到到的点坐标为
 3209
1844
3209
1844











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















