





从生产车间到自主无人机,采用快速、高分辨率、更小电机的机器人无处不在。这种快速旋转的微型电机需要微型集成电路封装尺寸级别的微型编码器。
但所有这些设计规范似乎是相互排斥的;例如,更快的信号编码转换通常会损害分辨率。这种系统的设计对设计者来说是一个挑战,因为快速旋转的电机不断要求提高采样速率。机器人执行的基本要求是运动和传感,编码器中具有高分辨率和快速转换速率的模数转换器(ADC)是其功能的核心。

图1. 旋转电机编码器感应转子上的槽口。
本文简要地讨论了在更快旋转的电机上实现小型,高精度电机编码器有关的问题。介绍了一种采用双同步采样、逐次逼近寄存器模数转换器(SAR-ADC)的编码器,以及如何利用内部基准和双同步采样输入级的优点。
电机编码器
增量式编码器是一种机电运动检测器。它有两个输出信号,A和B,指示运动方向和行驶距离。这些信号一起决定方向和速度。来自编码器的第三个信号确定电机的位置。
增量编码器有两种类型:线性和旋转。线性编码器在单个维度或方向上移动,并将线性位置转换为电子信号。旋转编码器围绕轴移动,并将旋转位置或角度转换为电子信号。其输出信号对应于轴的恒定角度变化。电机通常使用增量旋转编码器来执行方向、速度和位置跟踪(图2)。

图2. 电机有效地利用了旋转编码器,它量化了电机的旋转方向、速度和转子位置。
两种常见的增量旋转编码器具有数字或正弦信号输出。数字增量旋转编码器在码盘上有一定序列,输出50%的占空比,高或低数字信号。
数字编码器
光学数字编码器通过电机转子的槽传送光。当光线出现时,光接收器记录高数字输出,当光线被阻断时记录低数字输出(图3)。

图3. 光学数字编码器示出信道A和信道B,其中信道B复制信道A信号。
在电机转子的另一侧,光电二极管(图3)和跨阻放大器检测数字光脉冲。跨阻放大器的接口以低输入0.5pA的输入偏置电流和低噪声5nV/√Hz@1kHz来配合光电二极管。信道A和B中的信号通过各自的比较器到达微控制器,微控制器捕获最终的数字信号。信道A和B设置的关键在于微控制器能同时锁定这两个信号。
重要的是要在图3中创建一个稳定的TIA电路,以消除不确定性。反馈电阻(RF)和反馈电容(CF)与放大器输入电容(CDifferential+CCommon-Mode=CAMP)和光电二极管寄生电容(CPD)相互作用。最有效的TIA电路是相位裕度为65°的巴特沃斯响应电路。这个相位裕度对应5%的阶跃响应超调。方程式1显示了模拟巴特沃斯响应的TIA计算。

其中fGBW是单位增益稳定放大器的增益带宽积,CRF是寄生RF电容。方程式1允许电路设计者改变放大器带宽/输入电容以及反馈电阻值。有关TIA稳定性的更多信息,请参阅“TIA基础:噪声传递函数第4部分”。
在图3中,两个光通道A和B采集电机的旋转方向和速度数据。为了测量旋转方向,光学元件的位置和每个光轮窗口之间的距离在A和B方波之间建立90度相位差。电动机的方向与相角的符号有关。若A通道的上升沿先于B通道的上升沿,则相位差为正(图4a)。
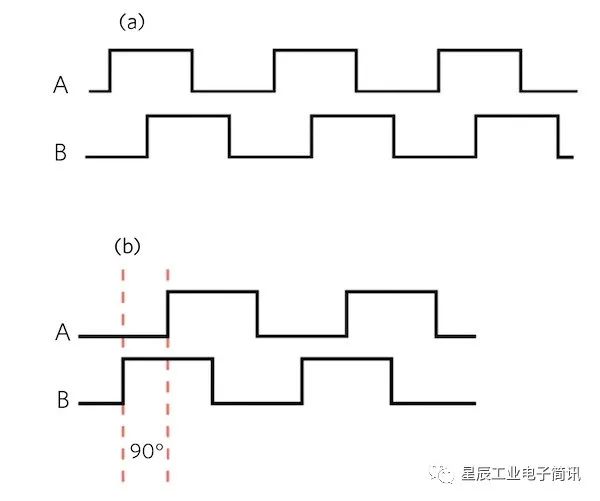
图4. 编码器同时捕获数字通道A和通道B信号。
如图4.b所示,若A通道的上升沿在B通道的上升沿之后,则相位差为负。A或B方波的频率决定了电机的速度。
图3的机械装置在一次电机轴旋转中产生多个周期。编码器制造商生产的增量数字旋转编码器(和增量正弦/余弦旋转编码器),每转50至5000周期。
除了数字信号,转子上还有一个参考标记,用于确定电机的旋转位置。设计工程师将参考标记称为360度电机转子旋转的0°角。数字脉冲参考标记计数值确定电机转子的准确旋转位置。
正弦编码器
增量式正弦编码器还提供一对正交正弦和余弦信号表示旋转方向和行驶距离。这种编码器的输出不是数字输出,而是正弦波和余弦波,可在更高的速度下为运动和距离提供更高的分辨率。这种编码器有三种信号:正弦、余弦和参考脉冲(图5)。
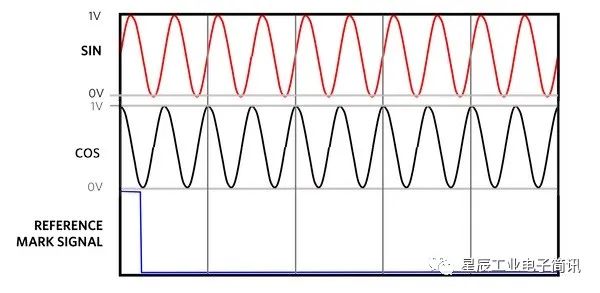
图5. 由正弦波和余弦波组成的正弦信号,编码器同时对两个信号进行采样。
模拟正弦编码器需要一个全模拟的信号链。从正弦编码器信号中提取可靠的位置和速度信息需要一定的模拟信号预处理。在ADC的第一个输入级,SIN和COS信号(通常输入信号范围为1Vpp)转换为差分信号。差分信号确保了最大的抗扰度,并提供了适当放大和电平偏移的单端SIN和COS信号,为模数转换器(ADC)输入级做准备。
每转有多个信号周期。产生的正弦/余弦频率取决于信号周期数和每分钟转数。例如,下面的方程式显示了编码器的正弦/余弦频率,该编码器的周期为4096个周期,电机转速为每分钟1400转(方程式2):
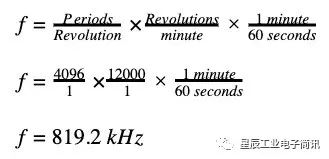
对于本例,信号链解决方案带宽至少需要为1600kHz。这种闭环控制系统需要极低的零延迟,这是由双同步采样ADC提供的。编码器输出为1VP-P(典型),为差分正弦和余弦输出信号。
模拟信号链的要求如下:
两个同时采样的ADC: ADC1提供正弦输出,ADC2提供余弦输出。
无系统延迟:最好是SAR(逐次逼近寄存器)转换器(其它包括ΔƩ或Pipeline转换器)
超过800kHz的带宽,因此ADC以大于1600ksps/通道的最小速率转换以满足Nyquist定理。
1-VP-P差分输入。
最佳解决方案是双同步采样SAR ADC(图5)。

图6. 输入频率为800kHz的2Msps ADC双同步采样,用电机线圈正弦信号确定电机的旋转方向和速度。
在图6中,两个单电源运算放大器将输入信号转换为差分信号,以驱动全差分ADC。ADC的外部1.2V电压基准为16位转换提供了一个良好控制的参考点。在两个同步采样通道的条件下,ADC每通道2Msps的输出数据速率满足规定的要求。
在本例中,2mm x 3mmTDFN MAX11198是一个16位ADC,正弦增量旋转编码器一圈有4096个周期。测量总步数的计算公式为(方程式3):
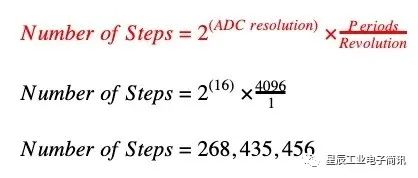
这种方法为设计者提供16位ADC分辨率和4096周期(4096=212),16+12或28位分辨率或旋转位置精度在1.341×μ度范围内。
结论
本文简要地讨论了实现用于更快旋转电机的小型,高精度电机编码器有关的问题。介绍了一种采用双同步采样SAR-ADC的编码器,并探讨了如何利用内部基准和双同步采样输入的优点。
在电机控制反馈路径中有两种典型的编码器实现方式:线性和旋转。我们从模拟信号链的角度评估了增量数字和正弦输出的输出信号特性,以确保信号完整性和最佳性能。
光学数字编码器提供高分辨率。然而,光学正弦编码器提供了更高的分辨率和更高的速度。















 8031
8031











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









