





(建议阅读原文) 预备知识 空间旋转矩阵,圆周运动的速度
直角坐标系中,某点
其中
其中
事实上, 数学上更规范的做法是用四元数表示该矩阵.
推导
推导的思路是用
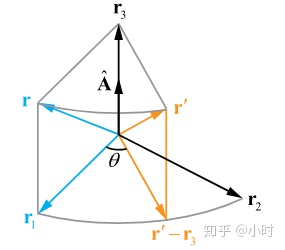
如图,
在与
为了构成一组正交基底,令
则
即
将式 4 式 5 式 6 代入式 8 , 即可求出
由旋转矩阵推导出匀速圆周运动的线速度
我们可以用旋转矩阵得到
在无穷小的时间
下面
两边除以
(建议阅读原文) 预备知识 空间旋转矩阵,圆周运动的速度
直角坐标系中,某点
推导
推导的思路是用
如图,
由旋转矩阵推导出匀速圆周运动的线速度
我们可以用旋转矩阵得到
 1370
2267
1370
2267











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























