







欢迎FPGA工程师加入官方微信技术群
卡尔曼滤波器是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。而且由于观测包含系统的噪声和干扰的影响,所以最优估计也可看做是滤波过程。
1 卡尔曼滤波的原理与理解
1.1 预测
假设有一辆小车,其在t时刻的位置为  (假设其在一维直线上运动,则位置可以用数轴上的点表示),速度为
(假设其在一维直线上运动,则位置可以用数轴上的点表示),速度为  。
。
因此在t时刻小车的状态可用向量表示为  。
。
但是我们并没有捕捉到一切信息,可能存在外部因素会对系统进行控制,带来一些与系统自身状态没有相关性的改变。如汽车司机可能会操纵油门,让汽车加速。
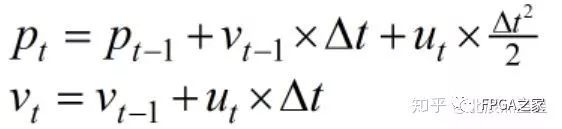
假设由于油门的设置或控制命令,我们知道了期望的加速度为  (加速度理解为外部的控制量),则可由运动学公式从t-1时刻推出其在t时刻的速度与位置如下:
(加速度理解为外部的控制量),则可由运动学公式从t-1时刻推出其在t时刻的速度与位置如下:
进一步的可以将其写成向量形式:
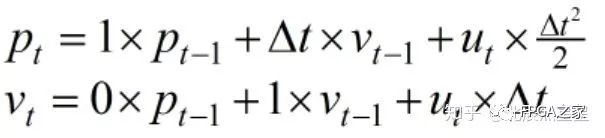
即:
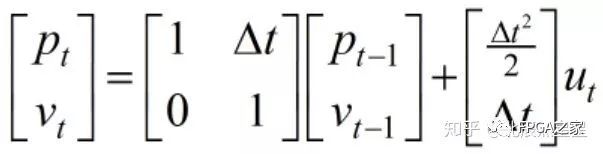
令
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 24万+
24万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









