





在计算机视觉中,尽管目前深度学习已经成为主流,但作为初学入门,掌握特征点这一思想还是很有用的,所谓特征点就是图像中特征比较明显的点,往往由关键点和其描述子组成,比较经典的关键点如sift, surf和orb等在众多场合都有应用,比如做视觉匹配或者导航SLAM等方面用到的ORB-SLAM,就是基于orb特征点做的,如果有感兴趣的读者可以私信,笔者会在后续章节详细剖析各类好玩的算法。
今天主要是实战,在ubuntu环境下基于第三节介绍的opencv-python安装方法,安装完opencv后:
1.找到你opencv源码的文件夹,找到其中simples文件夹中python文件夹。
2.找到文件find_obj.py(笔者所用版本为opencv4.0.1)。
3.在这个文件夹内打开你的终端,并进入anaconda配置的子环境,也就是安装了对应版本opencv的那个环境
4.执行这个文件($python find_obj.py)就可以看到例程匹配效果如下:
Opencv例程匹配效果
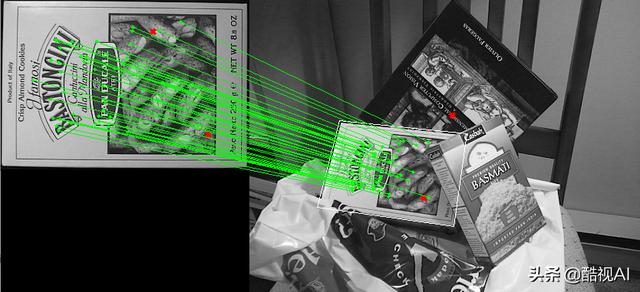
5.可以在命令后加-feature=sift或orb或surf来改变特征点提取的方法,也可以改变代码中img1和img2的imread函数路径为自己的图片路径,用自己的图片来做匹配,效果如下:

自己图片做匹配的效果
基于这段例程,你就可以实现一些自己的应用场景了,例如产品分类识别之类的,是不是很有趣呢。














 227
227











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









