





arXiv2019年12月上传的,发表在IEEE Transactions on Intelligent Transportation Systems,10月底有修改版: “Cooperative Perception for 3D Object Detection in Driving Scenarios using Infrastructure Sensors”。
单视角或者单智体的感知,比如3-D目标检测总有一些无法解决的问题,如有限视角、低点云密度和遮挡等。那么多个空间稀疏分布的传感器(即使是单模式)可以提供协同感知克服以上问题。
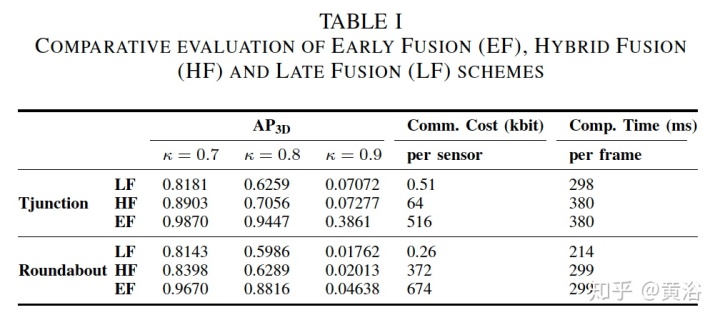
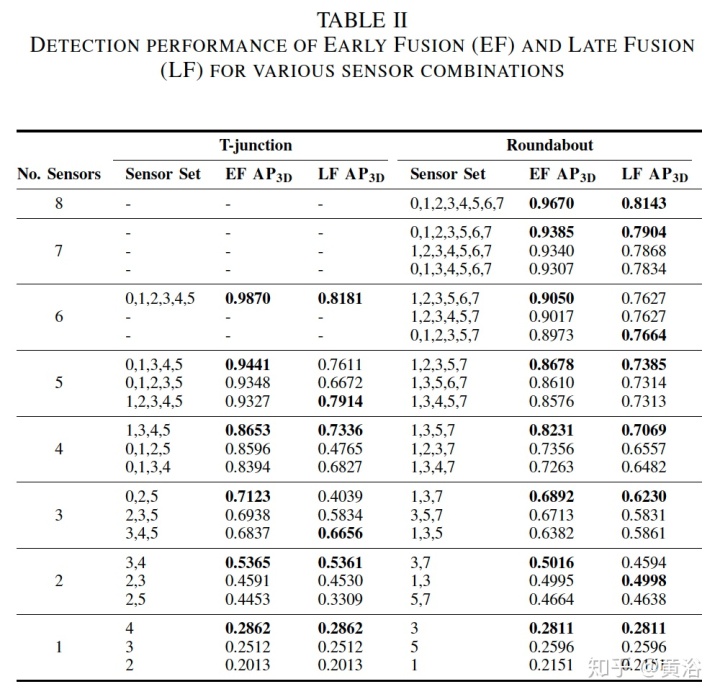
融合主要分早期和晚期两种(也有中期特征级别)。本文评估两种3-D点云目标检测的融合方法,主要采用一个合成数据集,模拟两种交通场景:环岛和T-型路口。结果表面,早期融合明显好于晚期融合。另外,融合的空间点也是一个因素。
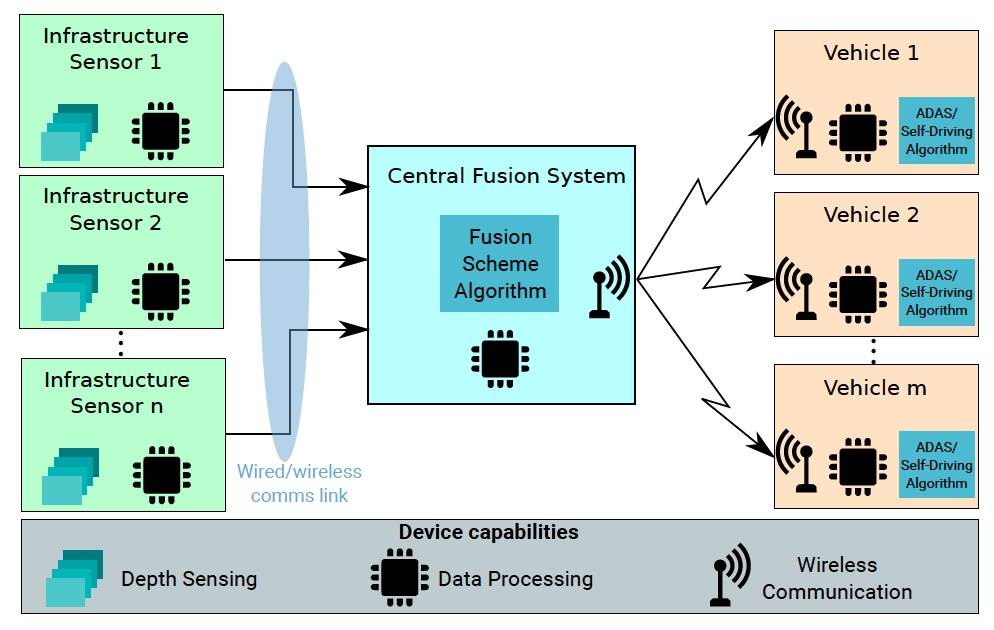
如图是系统模型:数据在中央融合系统汇总各个传感器的数据,形成周围车辆共享一个目标单的结果。
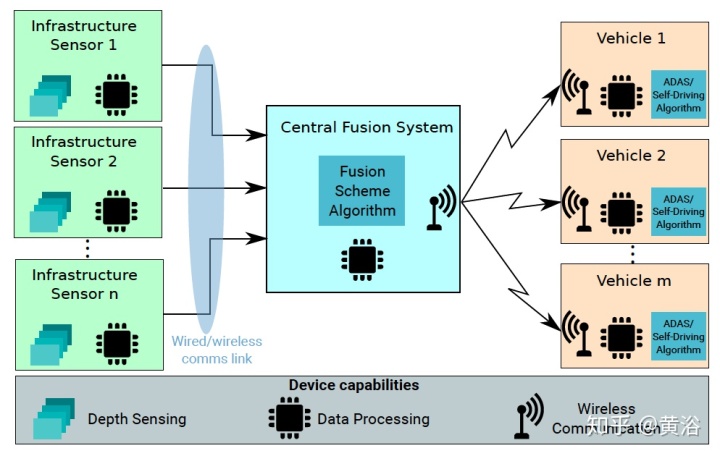
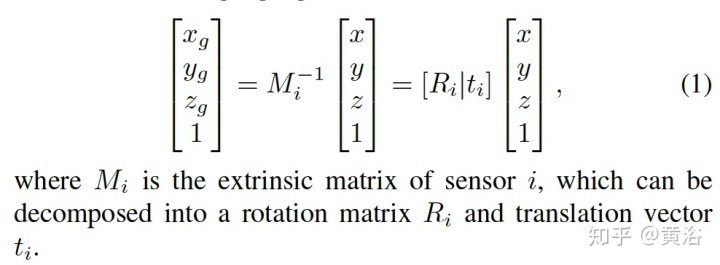
这里所有传感器的数据要转换成一个统一的坐标系下
如下图是早期(a-)和晚期(b-)融合的协同目标检测的示意图:
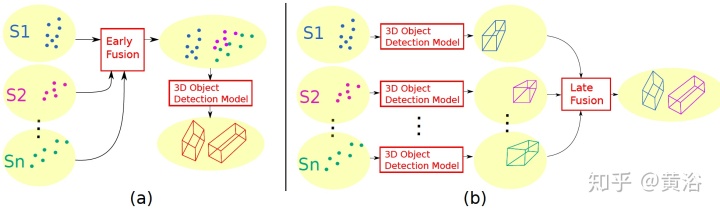
还有一种混合方案:与晚期融合相比,早期融合方案可以提高检测目标的可能性,归因于检测之前的汇聚信息,但需要原始传感器数据共享,这增加了通信成本;作为中间解决方案,混合融合方案使用这两种方案,在不显著增加通信成本的情况下提升检测的可能性;关键点是在传感器可见度较高的情况下共享高级信息(晚期融合),可见度较低的情况下共享低级信息(早期融合);靠近传感器的目标将具有较高的点密度,因此更可能使用单个传感器的观测值来检测;因此,不需要将传感器附近的点传输到中心融合系统,可减少通信带宽。
首先,在每个传感器节点采用晚期融合方案,并将检测到的目标框共享给中心融合系统;接着,每个传感器节点选择其在水平面投影在半径R的圆之外的点,与中心融合系统共享;半径R数值用来调节早期融合和晚期融合之间的权衡;随着R减少,中心融合系统共享更多原始数据;然后,中心融合系统对输入的点云使用早期融合方案,并将检测到的边框与每个传感器节点的晚期融合结果进一步融合。
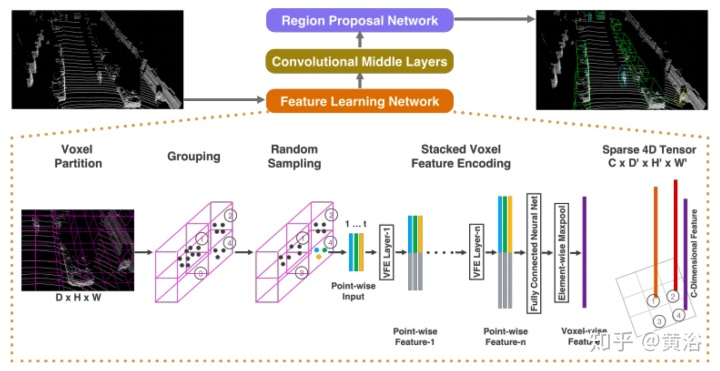
目标检测方法基于VoxelNet【19】:即Apple以前提出的方法,如图(方法不是问题重点)
模拟器采用Carla,对环岛和丁字口的模型场景如图所示:因为目前没有做这个的数据可用吧,只有自动驾驶公司才会收集实际的传感器数据。
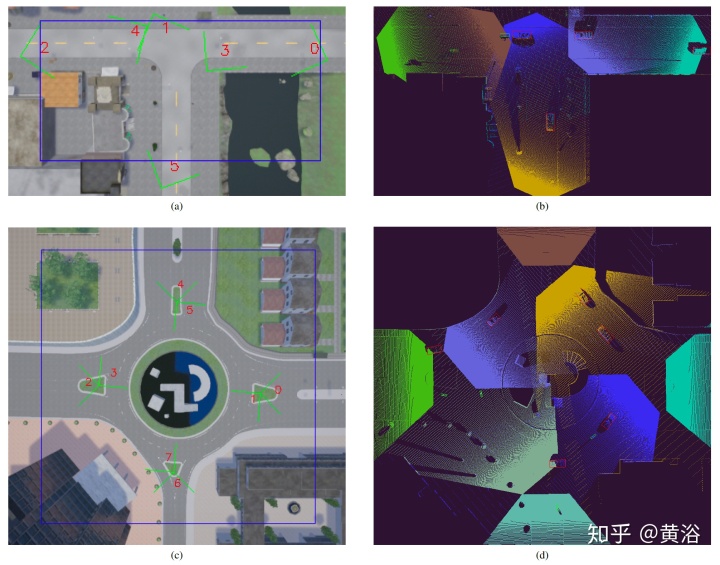
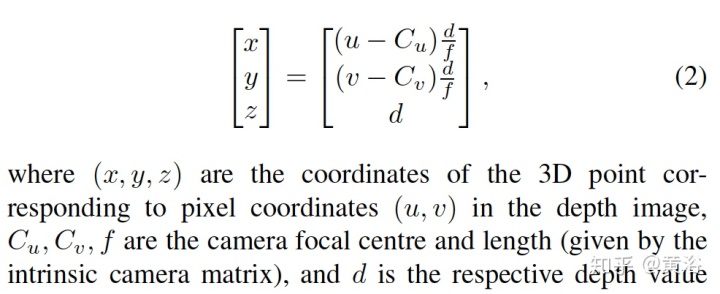
这里采用的传感器是RGB-D,丁字口用了6个摄像头,环岛用了8个摄像头,结果depth图像会转换为点云,即
这里给出一些结果:
注:这里没有考虑车路协同,只有路端融合结果共享给车辆,而不是运动的车辆传感器和道路传感器的融合,这样会面临道路传感器数据转换到动态车辆坐标系的复杂问题。















 1030
1030

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









