







无人机或机器人中常用的传感器主要有:加速度计、陀螺仪、磁力计、气压计、测距仪(超声波或者激光)、GPS。
1、加速度计
加速度计测量的是扣除重力以外的其他力的和。故地面上加速度敏感到的力即为支持力,其方向向上,大小为g(9.80665)。
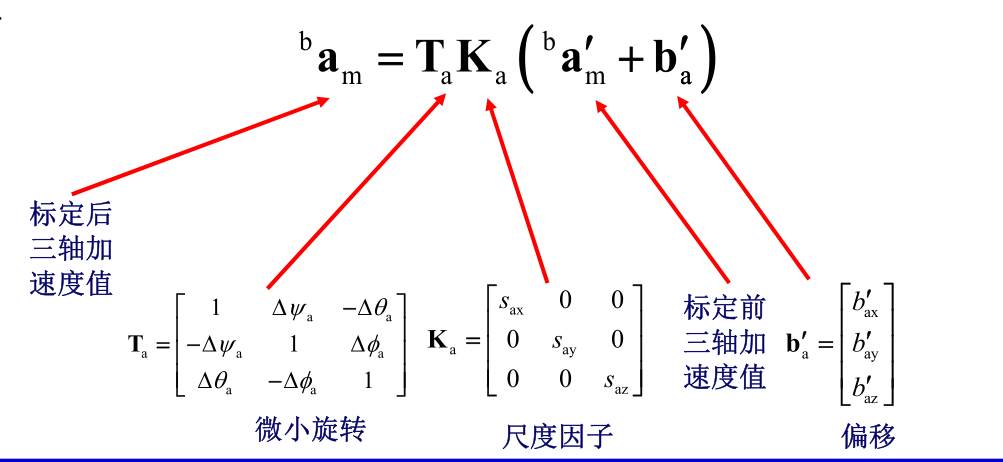
常用标定手段:
1、利用静止状态的加速度计向量的模值始终等于g,可以采取处于静止状态下各个方向的加速度计矢量,利用最小二乘获取上述图片中的9个变量。
2、将加速度各个轴分别向上、向下采集其数据,然后求解上述的模型参数。
- Reference vectors
- accel_corr_ref[6][3] = [ g 0 0 ] // nose up
-
| -g 0 0 | // nose down -
| 0 g 0 | // left side down -
| 0 -g 0 | // right side down -
| 0 0 g | // on back -
[ 0 0 -g ] // level - accel_raw_ref[6][3]
- accel_corr_ref[i] = accel_T * (accel_raw_ref[i] - accel_offs), i = 0…5
- 6 reference vectors * 3 axes = 18 equations
- 9 (accel_T) + 3 (accel_offs) = 12 unknown constants
- Find accel_offs
- accel_offs[i] = (accel_raw_ref[i2][i] + accel_raw_ref[i2+1][i]) / 2
- Find accel_T
- 9 unknown constants
- need 9 equations -> use 3 of 6 measurements -> 3 * 3 = 9 equations
- accel_corr_ref[i2] = accel_T * (accel_raw_ref[i2] - accel_offs), i = 0…2
- Solve separate system for each row of accel_T:
- accel_corr_ref[j2][i] = accel_T[i] * (accel_raw_ref[j2] - accel_offs), j = 0…2
- A * x = b
- x = [ accel_T[0][i] ]
-
| accel_T[1][i] | -
[ accel_T[2][i] ] - b = [ accel_corr_ref[0][i] ] // One measurement per side is enough
-
| accel_corr_ref[2][i] | -
[ accel_corr_ref[4][i] ] - a[i][j] = accel_raw_ref[i][j] - accel_offs[j], i = 0;2;4, j = 0…2
- Matrix A is common for all three systems:
- A = [ a[0][0] a[0][1] a[0][2] ]
-
| a[2][0] a[2][1] a[2][2] | -
[ a[4][0] a[4][1] a[4][2] ] - x = A^-1 * b
- accel_T = A^-1 * g
2、陀螺仪
陀螺仪主要用来敏感各个轴的角速度运动,其模型如下:
其精密校准方法同加速度计,首先利用转台获取其各个时刻的角度信息,然后利用单子样或双子样算法获取其解算的表达式,然后利用最小二乘得到其参数解。
但真实场景下我们常采用的是低精度MEMS,也很难有转台设备。通常下普通校准方法如下:
将陀螺仪处于静止状态时,其测量信息的均值及为零偏;将其旋转10圈,其解算得到的角度* 比例因子 = 10*360,即获取其估计的比例因子参数。安装角度信息则不考虑。
3、磁力计
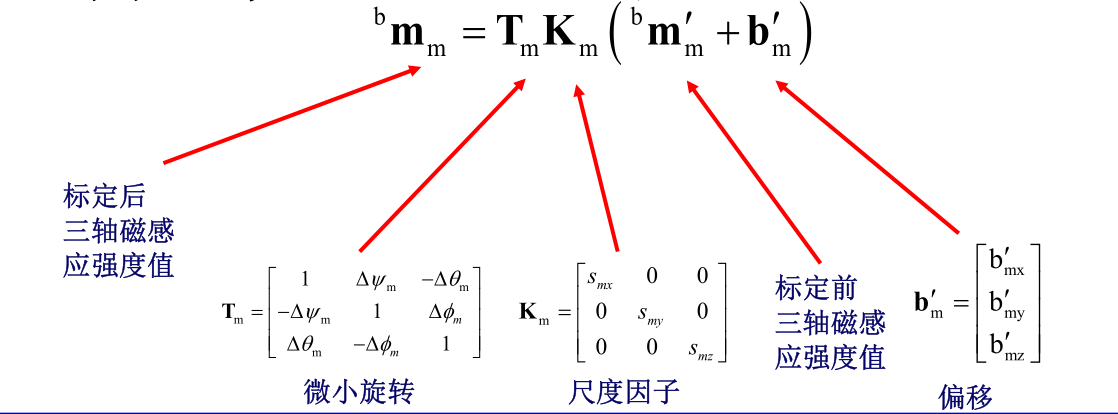
根据采集的充足磁力计数据,将其拟合成球形或者椭球形。然后带入上述公式获取其对应系数。
4、气压计
气压计是根据采集到的气压,然后利用下述公式可以转换为高度信息。利用气压计进行高度估计时可以代入下述公式。
最低绝对零度 T 0 = − 273.15 ∘ {{T}_{0}}=-{{273.15}^{\circ }} T0=−273.15∘,海平面温度 T s = 15 ∘ {{T}_{s}}={{15}^{\circ }} Ts=15∘,温度高度梯度 a = − 6.5 1000 ∘ / m a={{\frac{-6.5}{1000}}^{\circ }}/m a=1000−6.5∘/m,海平面气压为 p 1 {p_1} p1 kPa,当前气压计测量的气压为 p {p} pkPa,重力加速度为 g {g} g m/s2,气体常数 R = 287.1 ( J / k g . K ) R=287.1(J/kg.K) R=287.1(J/kg.K)。 T s {{T}_{s}} Ts换至开氏温度 T 1 {{T}_{1}} T1: T 1 = T s − T 0 {{T}_{1}}={{T}_{s}}-{{T}_{0}} T1=Ts−T0
h = ( T 1 ( p p 1 ) − a R / g − T 1 ) / a h=\left( {{T}_{1}}{{\left( \frac{p}{{{p}_{1}}} \right)}^{-aR/g}}-{{T}_{1}} \right)/a h=(T1(p1p)−aR/g−T1)/a
T s {{T}_{s}} Ts摄氏温度下的大气密度计算公式如下:
ρ = p R ( T s − T 0 ) \rho =\frac{p}{R({{T}_{s}}-{{T}_{0}})} ρ=R(Ts−T0)p
5、空速管
空速管主要是获取当前的动压,利用动压数据可以获取当前的指示空速和真实空速。还可以利用该数据结合气动数据在线估计当前的风速。
空速计温度为摄氏度 T T T,压差为$dP k P a , 15 摄 氏 度 的 海 平 面 参 考 大 气 密 度 kPa,15摄氏度的海平面参考大气密度 kPa,15摄氏度的海平面参考大气密度{{\rho }_{r}}=1.225Kg/{{m}^{3}}$。其转换至指示空速公式如下:
I A S = s i g n ( d p ) 2 ∗ d p / ρ r IAS=sign(dp)\sqrt{2*dp/{{\rho }_{r}}} IAS=sign(dp)2∗dp/ρr
真实空速计算如下:
ρ = p R ( T − T 0 ) \rho =\frac{p}{R(T-{{T}_{0}})} ρ=R(T−T0)p
$$TAS=IAS*\sqrt{\frac{{{\rho }_{r}}}{\rho }}$$
6、GPS
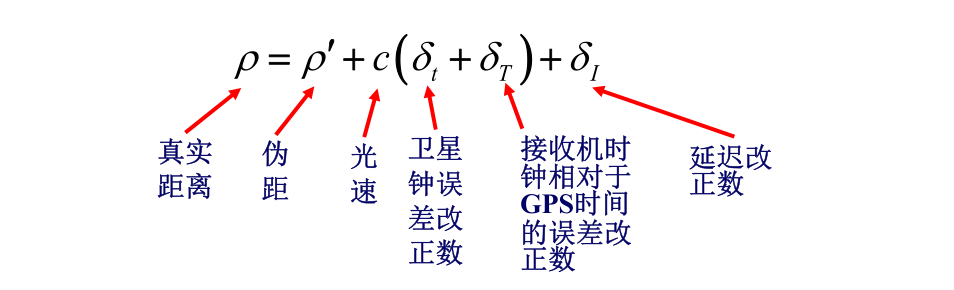
做紧耦合定位时可以利用上述公式作为测量方程。
7、matlab 编程
上述各个传感器模型在matlab中均可以找到,其加速度计、磁力计和陀螺仪封装在imuSensor,GPS传感器模型则集成在gpsSensor。
其imu解算主要有单子样(毕卡)、双子样和四阶龙格库塔法。
关注公众号,获取惯导解算代码、传感器模型代码以及imu的allan方差分析代码
❤️ 扫一扫,添加我的公众号或者搜索【无人机开发】
















 1198
1198











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









