






原文引自:
Frey, Patrick. "A timing model for real-time control-systems and its application on simulation and monitoring of AUTOSAR systems." (2010).
本文仅用于自学和交流使用,未经允许请勿转载~
4 Foundations
4.1 Control Theory
嵌入汽车电气/电子系统中的许多应用是控制应用。它们有助于车辆的常规操作(例如,发动机控制,变速器控制),辅助驾驶员(例如,自适应巡航控制,车道偏离控制)或执行其他自主操作。所有这些应用程序都具有一些固有属性,因为它们是控制应由于它们与实际物理过程的紧密交互,控制应用程序是实时应用程序。因此,控制理论中使用的方法和术语是开发这些车辆功能的基础。
在本节中,我们将回顾控制理论的基础。此外,随后导出了基于计算机系统的控制应用实现必须满足的时序要求。这构成了在AUTOSAR系统中实现的这种实时应用需要描述的各种时序要求的基础。
4.1.1 Physical Systems (Processes)
为了控制物理系统或过程,有必要捕获其结构和行为。这通常通过将物理系统的输入和输出描述为信号并通过描述这些信号之间的关系来完成。
图4.1描述了物理系统(也称为过程或工厂)的结构,如框图所示。
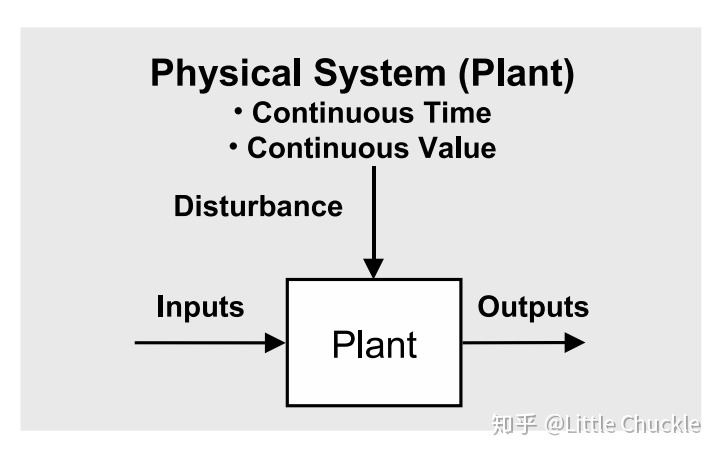
物理系统或过程通常表示为块以及它们的输入和输出信号。此外,可以根据系统的输入 - 输出传输行为的各种特征对系统进行分类。在下面讨论了两个重要的特征,线性和时间方差。
物理系统或过程通常表示为块以及它们的输入和输出信号。此外,可以根据系统的输入 - 输出传输行为的各种特征对系统进行分类。在下面讨论了两个重要的特征,线性和时间方差。
线性
系统可以分为线性系统或非线性系统。在线性系统中,系统输入和系统输出之间的关系可以用线性方程来描述,这意味着输入信号被放大或衰减以输出信号。形式上,线性可以定义如下:
Definition 1 (Linearity)
设
1.
2.
属性可加性和缩放被包含在叠加原理中。
图4.2(a)和4.2(b)分别描述了线性系统和非线性系统中输入和输出信号的关系。

在线性系统示例中,输入信号按比例衰减到输出信号。在非线性系统示例中,输入信号也被衰减到输出信号,然而,缩放不是均匀的。
时间差异
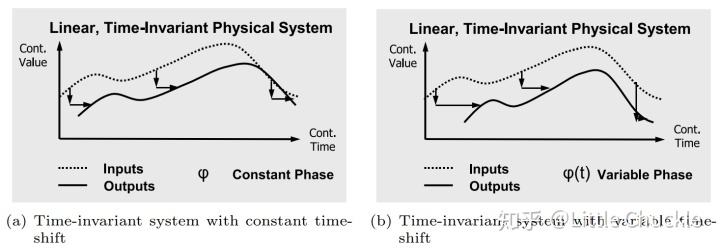
系统可以分为时变(TV)或时不变(TIV)系统。如果时移输入信号导致时移输出信号,则系统是时不变的。如果此属性不成立,则系统是时变的。
形式上,时间不变性可以定义如下:
Definition 2 (Time-Invariance)
设
图4.3描述了恒定和可变时不变系统中输入和输出信号的关系。
可以对系统进行分类的其他特征包括稳定性,因果关系和参数分布等。
控制理论侧重于系统的数学描述。在下文中,仅考虑线性系统,并且仅考虑具有恒定相位的时不变系统,因为这类系统可以通过具有可管理复杂性的数学模型来描述(即,没有时间相关参数)。此外,我们关注因果系统,因为系统输入和系统输出之间的关系是清晰的,并且与自然界中物理系统的属性相匹配。动态系统的数学模型在4.1.3节中讨论。对于非线性系统的情况,我们假设可以找到合适的线性模型,其充分近似于感兴趣的操作点周围的非线性系统。
4.1.2时域和价值域的信号表示/ Signal Representation in Time and Value Domain
系统描述中的另一个重要方面是时间和价值域中的信号的描述。系统信号可以根据它们在时间和值域中的表示来分类为连续的或离散的。在4.1.1节的例子中,输入和输出信号表示为连续时间,连续值信号。图4.4描绘了连续和离散时间和值域中信号表示可能的四种组合。
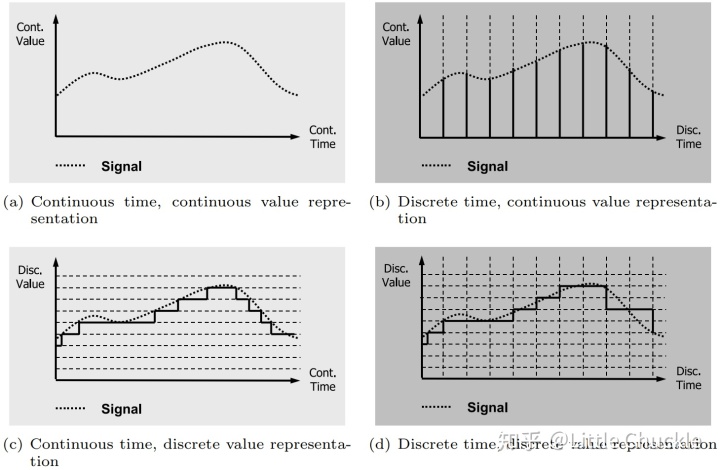
虽然大多数物理系统是连续时间系统,其中信号可以表示为连续时间,连续值信号,但数字计算机系统中的实现要求它们在离散时域中表示。将连续时间转换为离散时间表示称为离散化。通过在等距时刻对其值进行采样,可以使连续时间信号离散化。
4.1.3动态系统的数学模型/Mathematical Models for Dynamic Systems
为了描述系统的动态行为,使用数学模型。通过分析系统的输入和输出之间的关系来获得模型。目标是通过各种分析技术或基于测量或模拟的观察来研究它们的行为。
基于动态系统的输入 - 输出数据,动态系统可以通过确定与模型的特定形式相关联的参数的数值来以所选择的数学形式建模。识别和建模系统动力学的过程称为系统识别或过程识别。系统识别是控制工程领域的一门学科,本文不再进一步讨论。
在下文中,简要讨论了用于控制工程理论的动态系统的一种突出的数学建模技术:状态空间描述。我们还讨论了如何在数学模型中充分表示时间延迟并得出第一时序要求。其他数学建模技术例如是微分方程模型或传递函数模型。这些没有进一步描述。
状态空间描述模型
状态空间描述模型通过根据状态变量捕获系统状态来描述系统的结构。然后系统动力学由一组方程表示,这些方程描述了如何根据当前状态
在下文中,描述了没有时间延迟和时间延迟的连续时间,时不变线性系统的状态空间描述模型。
没有延迟的系统
连续时间,时不变线性系统可以用一阶微分方程系统[3]来描述:

x(t)状态向量/State vector
x˙(t)状态向量更新/Update of state vector
u(t)输入信号向量/Input signal vector
y(t)输出信号向量/Output signal vector
A连续时间系统矩阵/Continuous time system matrix
B连续时间输入矩阵/Continuous time input matrix
C连续时间输出矩阵/Continuous time output matrix
D连续时间直接(或前馈/馈通矩阵)/Continuous time direct (or feedforward/feedthrough) matrix
由等式4.1和4.2描述的数学模型也称为连续时间系统的状态空间描述。
连续时间,时不变线性系统的状态空间模型可以通过在等距时刻采样系统输入,即以恒定采样率
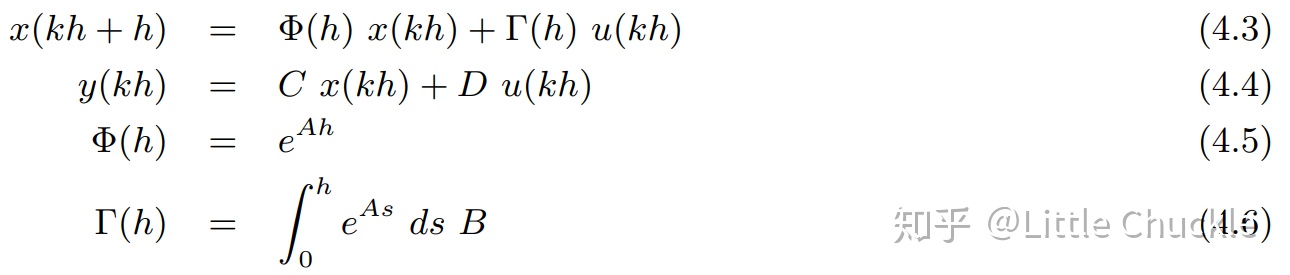
k = 0, 1, 2, ... Discrete-time sampling instant sequence number /离散时间采样即时序列号h恒定采样间隔
h Constant sampling interval /恒定采样间隔
x(kh) State vector at instant kh /时刻的状态向量kh
u(kh) Input signal vector at instant kh /瞬时输入信号矢量kh
y(kh) Output signal vector at instant kh /瞬时输出信号矢量kh
A, B, C, D System / Input / Output / Direct matrix /系统/输入/输出/直接矩阵
Φ(h) Discrete time system matrix /离散时间系统矩阵
Γ(h) Discrete time input matrix /离散时间输入矩阵
用于离散时间状态空间描述模型的系统和输入矩阵的精确推导可以在标准教科书中找到,例如, [73]和[87]。
由于连续时间信号的离散时间采样,必须通过离散时间实现满足以下时序要求:
时序要求1(等距输入采样)
在连续时间过程的离散时间实现中,连续时间信号的采样必须在等距时刻进行。为此,必须保持恒定的输入采样间隔h。
如果满足该时序要求,则输出信号也在等距时刻产生。一般来说,这是隐含的假设。然而,后者不能被系统的离散时间实现视为理所当然,例如,在可能发生可变计算延迟的计算机系统中。为此,我们制定以下相应的时间要求:
时间要求2(等距输出生产)
在连续时间过程的离散时间实现中,必须在等距时刻产生输出信号。由此,必须保持恒定的输出生产间隔h。
Systems with Constant Delay /具有恒定延迟的系统
在具有恒定时间延迟τ,0 <τ≤h的系统的情况下,可以将延迟包括在状态空间描述模型中以便充分考虑它。假设0 <τ≤h意味着时间延迟小于采样周期。然后,状态空间描述模型编写如下:

同样,通过在等距时刻h对系统输入进行采样,可以使具有延迟的连续时间,时不变线性系统的状态空间模型离散化。离散化导致其离散时间表示为差分方程。
图4.5描述了输出信号
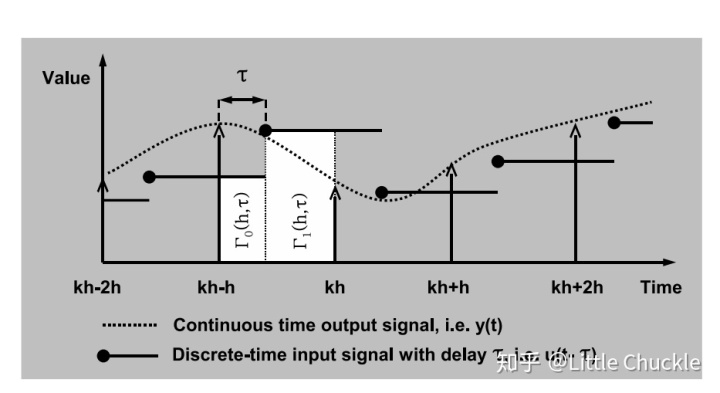
在该示例中,物理系统
从图中可以看出,输入信号必须在单个采样间隔内被视为两部分。因此,离散时间状态空间模型可以通过以下差分方程系统[3]来描述:
其中:
k = 0, 1, 2, ... Discrete-time sampling instant sequence number /离散时间采样即时序列号
h Constant sampling interval /恒定采样间隔
x(kh) State vector at instant kh /时刻的状态向量kh
u(kh) Input signal vector at instant kh /瞬时输入信号矢量kh
y(kh) Output signal vector at instant kh /瞬时输出信号矢量kh
A, B, C, D System / Input / Output / Direct matrix Φ(h) Discrete time system matrix /系统/输入/输出/直接矩阵
Γ0(h, τ ), Γ0(h, τ ) Discrete time input matrices/离散时间输入矩阵
在时变延迟的情况下,状态空间模型仍然有效,但系统矩阵将是时变的([3],[89]),即
4.1.4动态系统的响应分析
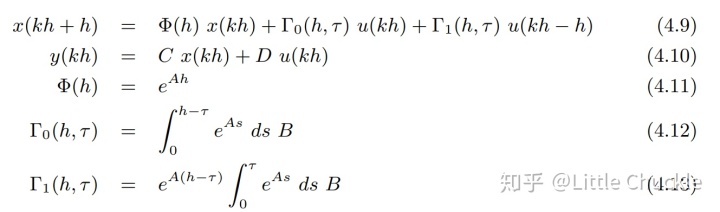
可以通过对标准特征输入信号的所谓瞬态响应方法来评估动态系统的特性性能特性。这种标准输入信号是阶跃,脉冲,斜坡或正弦波函数。在稳态下对输入信号的响应的准确性是通过响应方法(稳态精度)评估的特征性能测量。响应方法以提供给过程的输入信号命名,即阶跃响应,脉冲响应,斜坡响应和正弦波响应。图4.6(a)示出了示例性二阶系统对连续时域中的单位步长(即,大小为1的步长)的阶跃响应。
单位阶跃响应可以深入了解控制性能,因为可以评估以下特征的属性:

1 过冲 表示响应信号的最大峰值
2 上升时间 表示响应从其最终值的10%上升到90%所需的时间
3 稳定时间 表示响应达到并保持在一定范围内所需的时间关于输入值(例如,在δ= 5%内)
4 死区时间 表示系统在输入信号和输出信号之间的时间滞后
5 稳态错误 表示输入(所需响应)与响应之间的差异。系统安置完成后
响应分析方法是一种重要的控制工程工具,因为它们允许确定在动态性能方面考虑的连续时间信号离散化所需的采样率。一般适用的经验法则[3]规定,采样率的选择应使连续时间信号在单位阶跃响应中每个上升时间采样4-10次。这导致连续时间信号的离散化的一组可行的采样率。控制工程师必须决定特定的采样率。因此,响应分析方法是确定输入采样间隔h的大小的手段(参见4.1.3中的状态空间描述模型)。
图4.6(b)显示了示例二阶系统对离散时域中单位步的阶跃响应。在该示例中,已经选择了每个上升时间5个样本的采样率。
从图中可以看出,临界相位是在信号上升期间,由于陡峭的倾斜,样本经历了其值的最大差异。
4.1.5控制系统
可以在现代机动车辆中找到的控制应用实现为控制系统,其通常包括机械和电子。控制系统的电子部件进一步细分为硬件和软件部件。根据IEEE,控制系统可以定义如下:
定义3(控制系统(IEEE))
一种系统,其中通过对系统的各种输入进行操作来实现期望的效果,直到作为期望效果的度量的输出落入可接受的值范围内。
由于控制系统的重要性,一个完整的工程学科已经发展并致力于构建这样的系统的理论和实践。控制工程是多种性质的数学建模系统的工程学科,分析它们在时间上变化的动态,并使用控制理论创建一个控制器,使系统以所需的方式运行。
首先分析控制系统并将其设计为连续时间域中的模拟控制系统。随着上个世纪下半叶数字计算机技术的成功,现在几乎所有的控制系统都在离散时间域内实现为数字控制系统或计算机控制系统[3]。
在下文中,描述了两个基本控制系统概念,即开环和闭环控制,并根据它们的主要特征进行区分。
4.1.6开环和闭环控制系统
控制系统可分为开环控制系统和闭环控制系统。这取决于控制决策是否受到受控过程中产生的信息的影响。
定义4:
闭环控制系统是一种控制系统,其中控制决策基于来自受控制的工厂或过程的信息(即,一个或多个测量信号)的反馈。控制器使用反馈来做出关于作用于工厂的控制信号的变化的决定。
定义5
开环控制系统是没有或使用来自工厂的反馈的控制系统。
在控制工程术语中,图4.1中所示系统的过程输出也称为受控变量,即,它表示测量或控制的条件或数量。过程输入也称为操纵变量,即,它是由控制器改变的条件或数量,以便影响受控变量的值或条件。
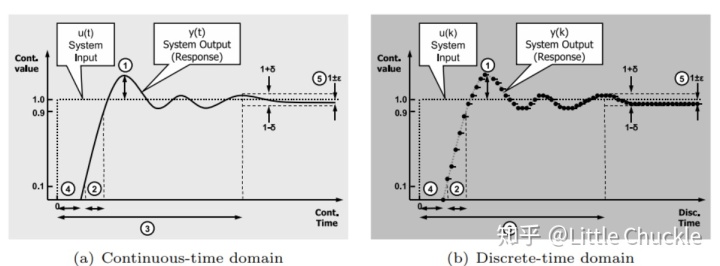
图4.7以框图形式描述了开环和闭环控制系统的基本结构([3],[40])。
在控制工程术语中,图4.1中所示系统的过程输出也称为受控变量,即,它表示测量或控制的条件或数量。过程输入也称为操纵变量,即,它是由控制器改变的条件或数量,以便影响受控变量的值或条件。图4.7以框图形式描述了开环和闭环控制系统的基本结构([3],[40])。
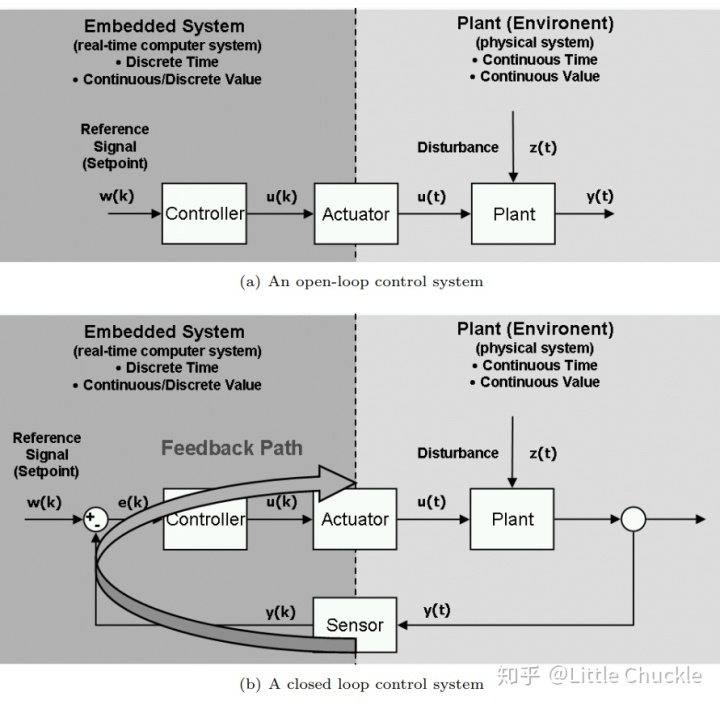
开环控制系统的主要部分是工厂(即受控制的过程),控制器和将控制器连接到工厂的致动器。闭环控制系统的主要部分是设备,通常称为传感器的测量设备,控制器和致动器。在附图中,假设控制器被实现为离散时域中的数字计算机系统。
开环控制系统的控制器部分可以例如由单个(线性或非线性)增益组成,该增益放大设定点值以匹配致动器的输入值范围,使得过程受控制(即,植物)受到期望的影响。
闭环控制系统的控制器部分通常更复杂。工厂的输出是连续时间信号,表示为
误差信号
控制器的任务是将受控变量u保持在恒定设定值
与开环控制系统相比,负反馈原理(反馈原理)以及闭合信号路径的存在是闭环控制系统的主要特征。从工厂过程的输出
在下文中,仅考虑闭环反馈控制系统,因为它们通常是控制应用的优选形式和汽车领域中的主要形式的控制应用。
4.1.7 Control Systems with Time-Delays/具有时滞的控制系统
在前面的部分中,已经描述了控制系统的基本结构,尤其是闭环控制系统。此外,已经描述了允许精确描述系统的动态行为的数学模型。这还包括包含时间延迟的系统。已经表明,可以将恒定时间延迟考虑为空间状态描述模型中的参数,该模型用于对过程的结构和行为进行建模。
在下文中,区分了关于闭环控制应用中的时间延迟的两种情况:首先,工厂的时间延迟对控制器设计的影响,其次是时间延迟对离散时间实现的影响。受控设备上的闭环控制器。
Time-Delays in the Plant工厂的时间延迟
图4.8(见下页)描述了一个示例闭环控制系统,其中工厂过程具有恒定的时间延迟。该时间延迟表示为

当从输入到输出的信号传输和转换花费相当多的时间时,存在工厂过程中的时间延迟。示例性系统是质量传输系统(例如传送带)或传感器和致动器远离的系统(例如,来自地面站的卫星定位控制)。
工厂的时间延迟可以通过使用特殊的控制架构概念来解决,例如Smith-predicator [3]。Smith-predicator预测控制变量的未来发展。为此目的,单独考虑具有和不具有过程死区时间的各个部件,并且将延迟的模型结合到控制器中。
因此,可以通过将它们结合到控制器的设计中来补偿工厂中的时间延迟。
Time-Delays in the Controller Implementation/控制器实施中的时间延迟
由于离散时间控制器在时钟硬件和软件方面在数字计算机系统中实现,因此不可避免的延迟被引入控制器。这种延迟通常被认为是计算延迟。
图4.9描绘了一个示例性闭环控制系统,其具有时间延迟
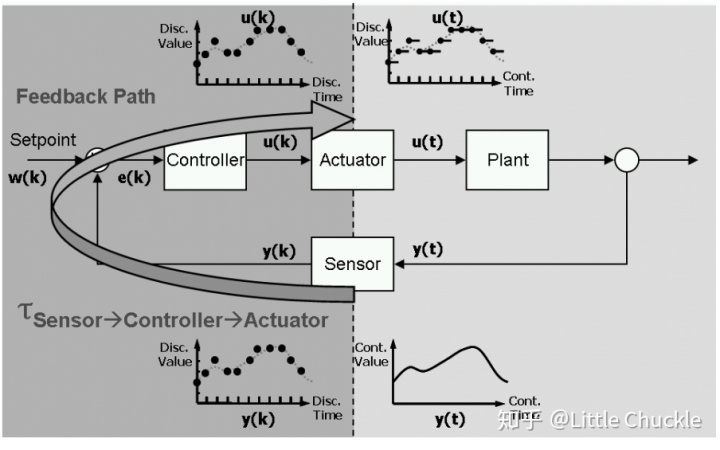
在反馈路径上有效的时间延迟以及因此对相关的传感器数据采集和输出数据致动动作的时间延迟可能具有负面影响,例如控制质量恶化甚至失去控制。
描述系统的动态行为的数学模型(例如,状态空间描述模型)的假设转化为用于实现数字硬件和软件中的控制系统的定时要求。
这些时间要求是:
Timing Requirement 3 (Minimization of feedback path delay)/时序要求3(最小化反馈路径延迟)
在控制应用的离散时间实现中,必须最小化从传感器到致动器的反馈路径延迟。形式上,这由
如果在控制器设计中不能忽略最小化延迟,则必须将其合并到控制器设计中。然而,这需要反馈路径延迟是恒定的,使得它可以包含在控制器的数学模型中,从而导致以下时序要求:
时序要求4(维持恒定反馈路径延迟)/Timing Requirement 4 (Maintenance of constant feedback path delay)
在控制应用的离散时间实现中,如果从传感器到致动器的反馈路径延迟不可忽略,那么端到端延迟必须保持恒定以便于其补偿。形式上,这可以表示为
请注意,这两个时序要求是备选方案,不能同时为控制应用程序指定。
4.1.8闭环控制系统架构/Closed-Loop Control System Architectures
在前面的章节中,已经考虑了由具有单个传感器和单个致动器的控制回路组成的控制系统的结构。在本节中,还将探讨和描述更复杂的控制系统架构。由此,得出了两个进一步的时序要求。
根据输入信号和输出信号的数量,控制系统可分为极端单输入单输出(SISO)和多输入多输出(MIMO)系统,或单输入/输出的任何混合形式 其间有多个输入/输出(即SIMO和MISO)。
单输入单输出(SISO)系统/Single-Input-Single-Output (SISO) Systems
到目前为止讨论的闭环控制系统是SISO闭环控制系统。SISO系统可以通过状态空间描述模型来描述,其中输入信号和输出信号是标量。线性时不变控制系统的理论假定时间要求1(等距输入采样)和2(等距输出产生),3和4(最小/恒定反馈路径延迟)通过离散时间实现来满足。
如4.1.3节所示,在控制器设计期间可以补偿恒定的反馈路径延迟τSCA= const,而可变延迟更复杂,通常应该避免。
Multiple-Input-Multiple-Output (MIMO) Systems/多输入多输出(MIMO)系统
图4.10描述了MIMO闭环控制系统的结构。与SISO闭环控制系统相比,由工厂产生的m个不同的物理量作为输出
MIMO闭环控制系统可以通过状态空间描述模型来描述,其中输入信号和输出信号是具有足够维度的矢量(即,→u(t), - →y(t)等)。这意味着在状态空间描述模型中,各个矩阵也具有足够的尺寸。注意,当标量信号表示为矢量时,图4.10中描绘的MIMO系统的结构可以以与SISO系统相同的方式表示。如果信号具有相同的物理类型(例如,单位km / h的车轮速度,来自冗余传感器的测量值等),则MIMO系统中的信号表示为矢量是有意义的,并且可以包含在更简洁的图形表示中 控制系统结构。
在MIMO系统中,与SISO系统相比,可以表达两个额外的时序要求。如果物理过程的输出或输入信号(分别为
Timing Requirement 5 (Synchronized measurement variable sampling)/时间要求5(同步测量变量采样)
需要以这样的方式感测物理过程的测量变量,使得它们彼此同步并且形成控制器内的输入信号计算的时间一致的基础。为此,从每个传感器到控制器的时间延迟必须小于指定的最大时间延迟。形式上,这可以表示为
时序要求6(同步控制信号驱动)/Timing Requirement 6 (Synchronized control signal actuation)
由控制器计算的控制信号必须在时间上是一致的,并且由致动器在工厂过程中彼此同步地实现。为此,从控制器到每个致动器的时间延迟必须小于指定的最大时间延迟。形式上,这可以表示为
如果输入或输出信号具有不同的物理类型(例如,压力,温度等),则它们可以具有不同的物理动态。然后,时序要求是个别时序要求,其取决于各个输出信号
汽车领域中的MIMO控制系统的示例是防抱死制动(ABS)系统或电子稳定程序(ESP)。在两者中,乘用车的所有四个车轮的车轮速度由各个车轮速度传感器感测并且馈送到控制器。然后,控制器处理测量的车轮速度信号,并决定是否需要执行稳定车辆的控制动作。这导致连接到车辆的各个车轮的车轮制动致动器的单独输出信号。在控制动作的情况下,车轮制动器致动器基于控制信号执行制动动作。对于控制信号计算,重要的是从所有四个车轮获得的车轮速度在时间上是一致的。对于控制信号致动,重要的是计算的控制信号在工厂上同步地实现。否则,由于不同步的制动动作,可能会发生不希望的效果。














 367
367











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









