





上一期中,为大家讲述了基于导出IGES格式文件的机器人焊点坐标提取方法,本期再来为大家介绍一种基于手动测量工具的机器人焊点坐标提取方法,此方法操作简单、方便快捷,适合焊接板件焊点坐标较少的情况下使用。
一、焊点坐标值测量
1.参考上一期的文章《PDPS软件:机器人焊点坐标数据提取》中的方法,单独打开焊点坐标数模。
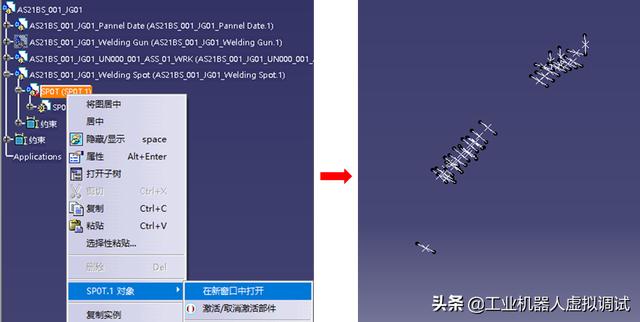
打开焊点坐标数模操作
2.点击下方的“测量项”工具按钮,弹出测量项对话框,同时鼠标指针变为卡尺图标。然后鼠标移动到要测量的焊点坐标数模上,待卡尺图标右下角出现“×”标记后,点击鼠标左键,焊点坐标数模处出现坐标值,同时测量项对话框的结果区域下也显示测量点坐标值,勾选“保持测量”选项,点击确定按钮,右侧浏览树中出现测量资源节点,显示测量点坐标值。
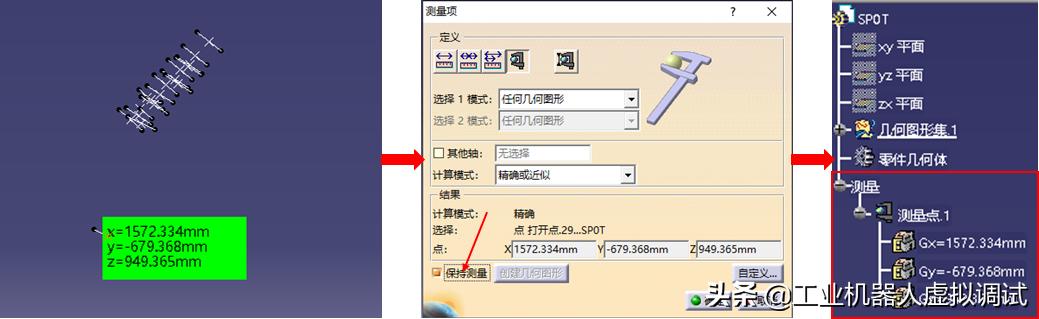
测量焊点坐标值操作
3.参考上述步骤,将所有机器人焊点坐标数模的坐标值测量出来,测量完成后左侧浏览树以及软件工作区中显示所有的焊点坐标测量值。
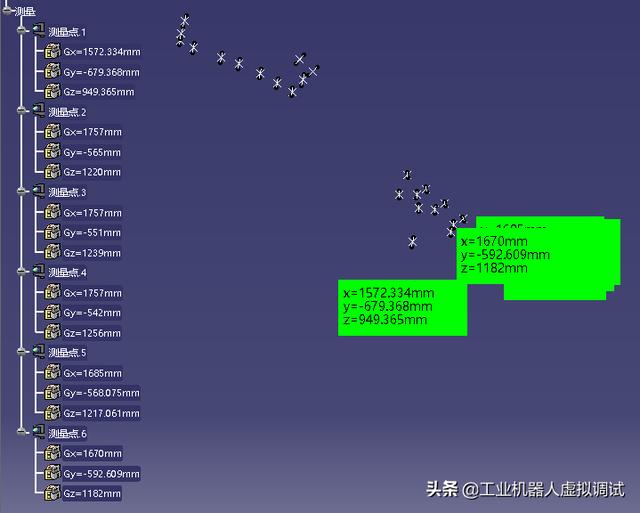
测量完的焊点坐标值
二、导出焊点坐标数据
1.点击下方的“设计表”工具按钮,在弹出的创建设计表对话框中勾选“使用当前的参数值创建设计表”,方向后勾选“水平”选项,点击确定按钮。
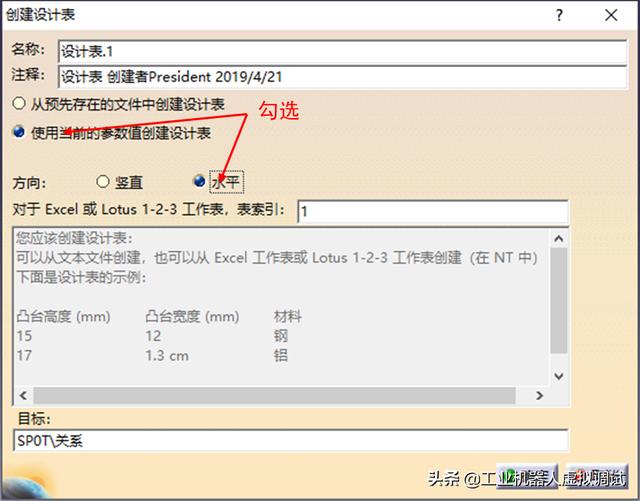
创建设计表属性设置
2.此时弹出选择要插入的参数对话框,点击左侧浏览树中的“测量”资源节点,对话的“要插入的参数”下显示所有的机器人焊点数模测量坐标选项,将其全选,然后点击“右向箭头”按钮,使得所有的机器人焊点数模测量坐标选项显示在“已插入的参数”下,点击确定按钮。
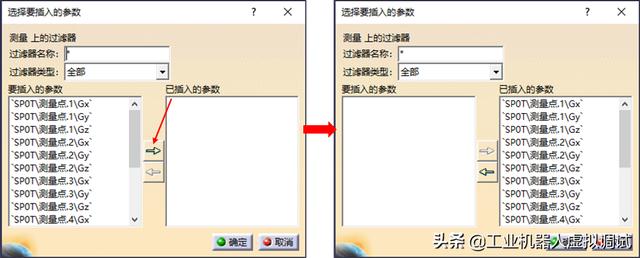
选择要插入的参数属性设置
3.在弹出的另存为对话框中浏览到要保存的焊点坐标数据文件夹中,为坐标数据文件命名,点击保存按钮,稍等片刻焊点坐标数据将被导出。

另存为对话框
4.数据导出成功后,弹出设计表预览对话框,可以查看已导出的各个机器人焊点坐标数据以及导出操作属性配置,确认无误后点击确定按钮。
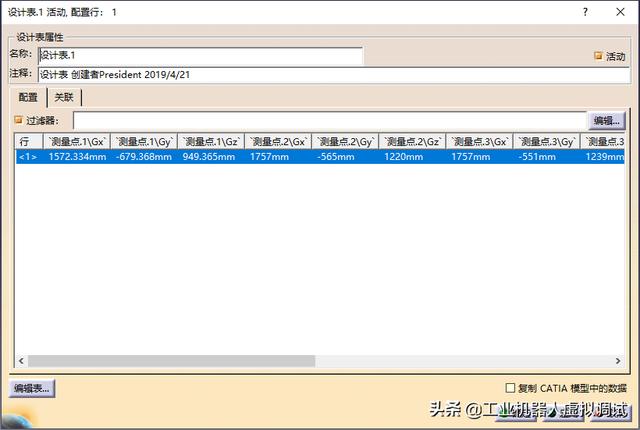
设计表预览对话框
三、导出焊点坐标数据查看
在保存的焊点坐标数据文件夹中,使用Excel电子表格软件打开导出的焊点坐标数据文件,可以看到每个焊点数模坐标数据已经成功被提取出来。

提取的焊点坐标数据
The End
上一篇:PDPS软件:机器人焊点坐标数据提取















 1285
1285

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









