





属于时空预测方向,在人工智能相关会议上有不少工作值得借鉴。
原始数据集总结
一、TaxiBJ,北京出租车数据集,郑宇,"BJ15_M32x32_T30_InOut.h5",原始数据shape=(5596,2,32,32),"2"代表出In/Out两种流量。
备注:数据应用在ST-ResNet(AAAI17,郑宇的经典,该领域的里程碑)中。
二、METR-LA,洛杉矶高速路数据集,"metr-la.h5",原始数据shape=(12,6850,207)——间隔5分钟,预测未来1小时(12,207,2)->(12,207,1)
备注:数据应用在DCRNN文章中。可以在官网下载,可以在文章github上面下载。
三、NYC-Taxi,纽约出租车数据集,"volume.train.npz",原始数据shape=(1920,10,20,2),"10,20"代表网格化地图形状,同郑宇的"32,32"
备注:数据应用在STDN文章中。

四、PeMS04/08,加利福尼亚高速数据,"data.npz",原始数据shape=(10195,307,3)——间隔5分钟预测1小时(307,3,36)->(307,3,12)
备注:数据应用在ASTGCN文章中,"3"代表交通流量3种特征(flow,speed,occupancy)。
五、其他数据集
1)2009.5月——北京出租车数据集(一个月);
备注:郑宇的文章中含有。
2)2014.8月——成都出租车数据集(一个月);
备注:比赛数据。
3 geolife项目,2007,分享个人轨迹到地图上,识别用户交通模式,基于历史轨迹推断用户相似性,基于协同过滤的位置推荐,利用用户模式挖掘位置间相关性,潜在旅行伙伴推荐,基于位置和偏好感知的推荐系统。

4、T-Drive项目,2010,结合出租车司机驾驶习惯 & 时间、天气等外部信息,给出驾驶路线

5、T-Finder项目,,2012,上下客双向推荐,两个位置
学术论文梳理
TKDE期刊 (IEEE Transactions on Knowledge and Data Engineering)
2019,MDL 郑宇;交通流量预测。给定历史观测值和外部特征,提出一个共同预测模型,作者搭建了基于参数硬共享的双任务深度学习模型,学习节点流量(Node-level)和边流量(Edge-level),完成了流量进出和流量迁移两个任务的预测。所提出的MDL最终在北京和纽约的出租车数据集上超过了ST-ResNet在内的11个baseline。
NIPS会议
2017,PredRNN 清华,利用自定义的 “时空LSTM” 单元,基于历史数据帧预测未来图片,数据集采用Moving Mnist(Mnist视频流也是高端...)。
CVPR会议
2017,Structural-RNN,将时空图转换成RNN混合体的一种通用的可扩展的方法。作者是用来做行为识别的。感觉是非常视觉的paper,膜拜一下就好...
AAAI会议
2017,ST-Net 郑宇;目前已经基本复现了微软亚研院郑宇在人群流量预测工作中使用的ST-ResNet残差网络。
2018,DMVST 宾夕法尼亚(姚骅修,滴滴实习生等);综合考虑时间、空间、语义三方面信息,预测出租车需求,其中数据来自2017年滴滴出行在广州的近两个月数据。作者提供了开源代码,li zhenhui老师后续在AAAI2019又发表了一篇"Revisting Spatial-Temporal similar",提出STDN网络(姚骅修,数据来自NYC纽约),工作也是相当多的。

2019,ASTGCN 北交(郭晟楠,林友芳,宋超等):,采用加利福尼亚的两段高速数据,目前为预测1小时后的交通流量,使用mxnet搭建神经网络(添加了注意力机制的STGCN)。使用三个组件对时间序列上三个不同长短的周期模式进行建模。使用的mxnet架构,不熟悉的伙伴小心了。
2019,STMGCN(李亚光,滴滴):空间上引入Multi-Graph多图,针对地图区域间非欧关系,本文提出更加详细的三种关系图(距离临近、功能相似、道路相通),对多图进行图卷积并聚合。时间上Contextual Gated RNN,实际为SENet思想。针对训练样本序列,利用SENet的Squeeze和Excitation操作,对每个时刻图进行全局池化,和图自身卷积池化的结果相加,再利用Excitation达到不同通道权重化的效果。
2020 还有两片最新的论文,大家感兴趣也可以读一读。
皇德华叫兽:[AAAI2020] 图注意力机制网路用于交通预测zhuanlan.zhihu.comICLR会议
2018,DCRNN 南加大(李亚光,虞琦等人):本文借鉴ICLR2017的一篇(RNN对图结构数据的推广)的思想,将该模型用于交通预测。首先构建图,这个图可以加权也可以不加权,可以有向也可以无向,本文使用的是加权双向有向图。交通预测挑战在于:空间路网复杂,时间依赖非线性。本文干的事概括来讲是:给定历史车速与路网数据,预测未来的车速。使用基于图bidirectional random walks捕获空间依赖,使用基于序列的带预定采样的编解码机制捕获时间依赖。上来创新点扣了个大帽子:“交通空间结构非欧,有向”。本文在洛杉矶构建了带权有向图,图的顶点是sensors(207个),边是权重,通过路网上 sensor 之间的距离得到。时间间隔5分钟,预测未来1小时的速度,所以输入数据中一个样本是(12,207,2),输出为(12,207,1)。这里有文章解读:
2018,GAT 剑桥大学(还有Bengio大神),提出的图注意力。IJCAI会议
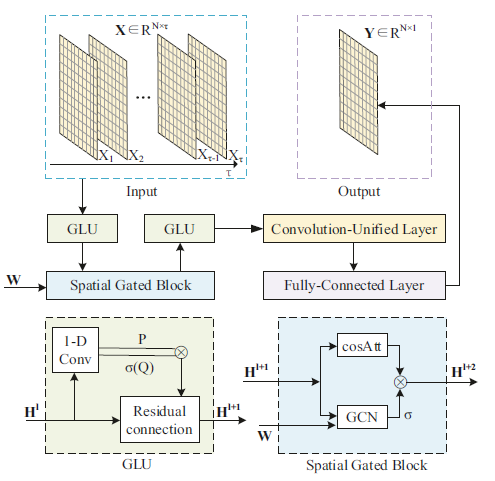
2018 STGCN,提出了时空图卷积的网络架构,作者通过构建时空卷积块预测交通图中不同路网节点的速度v,且利用的是加州和北京两个数据集进行验证。使用局部图卷积(基于拉普拉斯图的一阶近似),无向图。
2018 GeoMan,还是郑宇,张均波那些人的,预测传感器值的回归问题,使用水质数据和空气质量两个数据集进行验证。
Sensors
2017 Deep CNN 北航+北交,用CNN模拟空间相关性,但空间结构在欧式空间 (例如:2D图像),理解为普通网格地图策略。
IJCNN会议
2018 Deep Transport 百度,通过明确收集各道路上下游的邻域道路, 并分别对这些邻域进行传统卷积, 对空间依赖关系进行建模。
还有一些其他的数据网址,有需求可以逛一逛:
Stanford Large Network Dataset Collectionsnap.stanford.edu Bike Sharing in Washington D.C. Dataset | Kagglewww.kaggle.com Taxi & Limousine Commissionwww.nyc.gov RESOURCE – Data Mining Labdm.uestc.edu.cn LSTW: Large-Scale Traffic and Weather Events Dataset - Sobhan Moosavismoosavi.org两个开源的地图及出行开发工具:
graphhopper/map-matchinggithub.com
地图数据源获取:
OpenStreetMapwww.openstreetmap.org

------------------------------------------------------------------
2020年交通预测文章汇总如下:
皇德华叫兽:【2020顶会KDD】AutoST:面向时空预测的高效神经网络学习模型zhuanlan.zhihu.com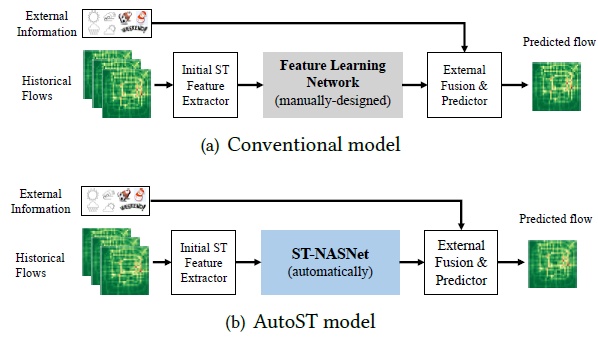


强化学习相关的内容:
皇德华叫兽:强化学习在智能交通灯中的应用zhuanlan.zhihu.com
交通灯为智能体进行控制
Reinforcement Learning for Traffic Signal Controltraffic-signal-control.github.io
单辆车为智能体进行控制
http://www.thu-lead.com/www.thu-lead.com其他相关的内容:
皇德华叫兽:【2020顶会KDD】用于属性图嵌入的自适应图形编码器
皇德华叫兽:【2020顶会KDD】一种基于邻域的异构图推荐交互模型
主编推荐 | 图神经网络简介及其在交通流预测中的应用
基于多任务时空网络的交通预测
皇德华叫兽:基于迁移学习的城市预测
皇德华叫兽:[ICLR2018]深度学习用于交通预测的经典文章-DCRNN
如果觉得有帮助,欢迎收藏+关注,后期我会持续更新论文解决,与新数据信息!!
更多相关专业文章,欢迎关注公众号【图与交通】!
可以添加微信(微信号: professor_huangdehua ),拉你进专业交流群。

















 1438
1438

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









