






 本文通过介绍一个 Arduino 控制的小车追踪目标路径的项目,解释了PID控制器在硬件选择与仿真中的应用。文章详细阐述了控制系统逻辑,选择了Arduino UNO作为控制器,舵机作为执行器,激光雷达作为距离监控器,并使用Simulink进行系统仿真,验证PID控制器的性能。
本文通过介绍一个 Arduino 控制的小车追踪目标路径的项目,解释了PID控制器在硬件选择与仿真中的应用。文章详细阐述了控制系统逻辑,选择了Arduino UNO作为控制器,舵机作为执行器,激光雷达作为距离监控器,并使用Simulink进行系统仿真,验证PID控制器的性能。
可能部分读者在读完《PID控制原理 一(开闭环控制)》,《PID控制原理 二(PID使用详解)》后依然会有很多疑问:
比如Ep(小车距离目标路径的实际距离)是怎么得到的?Sa(小车的控制转角)是被谁控制的,怎么实现的?PID控制器是在什么硬件上被执行的?等等问题。为了解决你的疑虑,现在跟着笔者一起准备起来,制作一个‘小车追踪目标路径’ 的项目吧!
先说需求:
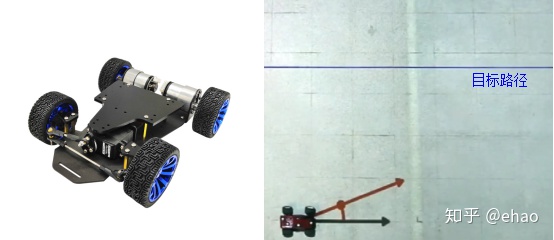
有一辆小车(上电后会驱动后轮,速度恒定,类似小时候玩过的四驱车);另有一条路径,如下图蓝线所示,是用激光投影打出来的。现在需设计一个控制系统,使得上电小车在行进中可以自行追踪到目标路径:
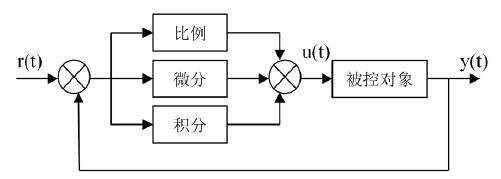
在《PID控制原理 二(PID使用详解)》一文中笔者已经设计一套控制系统。确定了控制系中PID控制器的输入输出。其中输入为Ep(小车距离目标路径的实际距离--最近距离),输出为Sa(小车每次的控制转角),被控对象是“小车”

规定Ep方向:当小车在目标路径右边,则Ep>0;若小车在目标路径左边,则Ep<0
规定Sa方向:当Sa>0时,小车向左拐(小车前进方向的左);当Sa<0时,小车向右拐(小车前进方向的右)
1.真实的控制系统
为达到小车追踪目标路径的目的,设计控制系统逻辑图如下:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









