






本文灵感来自于 仪表云 视频:“10分钟了解PID工作流程”,下面附上连接
Sina Visitor Systemweibo.com笔者属于控制入门,文中若有不当之处还请读者指出,欢迎大家讨论!
---------------------------------------------正文---------------------------------------------
在 “PID控制原理 一 (开闭环控制)” 一文中已经介绍了开闭环控制,并且介绍了一种最简单的控制器:“Bang-Bang Control”
笔者已经说过,BangBang Control太傻,因此为使控制变得更智能一点,希望引入一种聪明的控制器。接下来,我们依旧利用“PID控制原理 一 (开闭环控制)”文中的小车沿着路线行驶的转向控制来讲解:
------------------------------------------前提准备------------------------------------------
图1中小车向东行驶,车速恒定,其目标是最终沿着目标路径走(有目标,闭环控制),路径有方向,黑色箭头为路径延伸方向
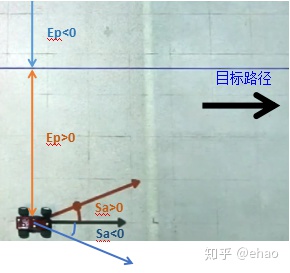
图 1
在此,我们设定小车距离目标路径的实际距离为Cross Track Error ( Ep ),由于目标距离=0;所以 Ep也就是误差;
Ep方向:当小车在目标路径右边,则Ep>0;若小车在目标路径左边,则Ep<0
另外,如果小车想走到目标路径,就必须先拐弯,因此我们设定小车每次的转弯角度为Sa, Sa就是控制输出(每个控制周期的输出);
Sa方向:当Sa>0时,小车向左拐(小车前进方向的左);当Sa<0时,小车向右拐(小车前进方向的右)
如图 2,可以借此画出小车闭环控制的逻辑图,循环控制周期为‘ t ’:
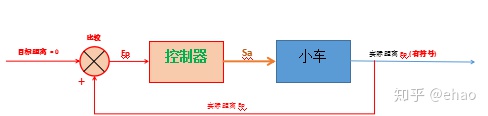
图 2
-----------------------------
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 2605
2605











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









