






1、前记:一个案例的记录。
介绍:
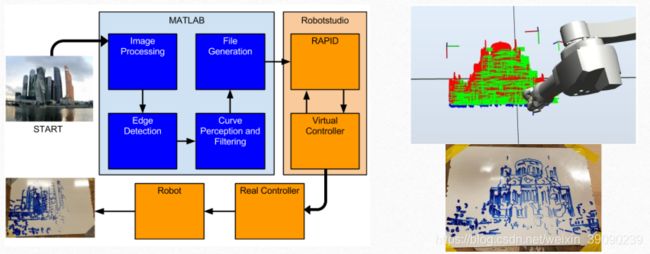
Using robots to draw is an emerging artform. To expand this field, a method for sketching any image, on a dry
erase board, using an ABB IRB 1600 industrial robot, was developed. The four tasks to complete this goal include: developing the mechanical fixturing for the marker, writing path perception algorithms, porting the computer vision data to the robot’s proprietary controller, and a full system integration and test. The provided 3-pronged radial gripper with custom 3D printed finger was used to grasp an Expo brand, bullet-tipped, dry erase marker. An 18 x 24 inch whiteboard was featured in the workspace to draw upon.
To perceive to curve to sketch form the image, two main procedures were used from MATLAB’s image processing toolbox. First, canny edge transform was performed on the reduced grayscale image. Then a breadth-first search algorithm was developed to generate a collection of vectors representing a list of paths, with each path being made up of groupings of
coordinates. The next step was to import the paths into the ABB proprietary software, RobotStudio, and RAPID programing language. To accomplish this, the path data was written to a text file using RAPID syntax and pasted into RobotStudio. The final system was largely successful in sketching the image. Mechanically, there were issues with line thickness consistency as the board table is not entirely level as the marker was very rigidly held in the end of arm tool. Future iterations may include improved marker fixturing, further algorithm refinement, and multiple colors.
过程:














 831
831











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









