





 本文详细介绍了卷积运算,从测量飞船的实例出发,阐述卷积的基本概念,包括卷积核翻转、不翻转的情况,并探讨了卷积运算的特点,如稀疏交互和参数共享。接着讨论了卷积的变体,如多通道卷积、调整卷积步幅和填充方式。最后,讲解了卷积求导,为理解神经网络中的反向传播奠定基础。
本文详细介绍了卷积运算,从测量飞船的实例出发,阐述卷积的基本概念,包括卷积核翻转、不翻转的情况,并探讨了卷积运算的特点,如稀疏交互和参数共享。接着讨论了卷积的变体,如多通道卷积、调整卷积步幅和填充方式。最后,讲解了卷积求导,为理解神经网络中的反向传播奠定基础。

本文的主要思路如下:

1 从测量飞船的例子开始
假设

则,期望求解如下:
当
上面的积分运算过程被定义为卷积运算,标记为
在计算机科学中离散卷积更符合实际情况,即上诉第一个公式,此时
直观理解:卷积运算表示前
2 卷积运算
2.1 卷积核翻转
飞船的例子描述的是1D的情况,如果扩展到2D,考虑采用2D卷积核,那么:
其中:
-
:输入的2D数据,例如一张灰度图片
-
:2D卷积核,如果卷积核下标超出卷积核范围那么设置为得到的值恒为0
假设
那么:
从结果上看,卷积操作为:卷积核分别沿着45°、135°轴翻转180°,然后沿着输入的左上角依次滑动,每移动一次,计算一次加权平均值。
翻转卷积核之后的过程如下:
2.2 卷积核不翻转
上述卷积操作需要对卷积核进行翻转再运算,这样的操作满足卷积运算的交换律。但是在神经网络中,交换律不是很重要的性质。通常神经网络库会实现一个互相关函数,和卷积运算几乎一样,除了没有对卷积核翻转。
通过互相关函数,卷积核在滑动操作时不需要翻转。现在主流框架实现的方法都是上述互相关函数。后面值的卷积也都是互相关函数
2.3 卷积运算的特点
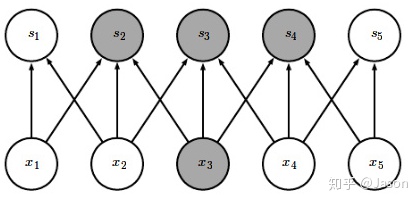
- 稀疏交互
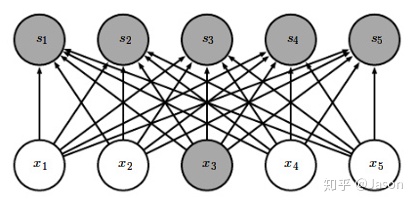
如图2.3.1 所示,卷积操作中,一个输入单元只和部分输入单元发生交互,一个输出单元也之和部分输出单元发生交互;而如图2.3.2所示,全连接操作中,每个输入单元都和所有输出单元发生交互
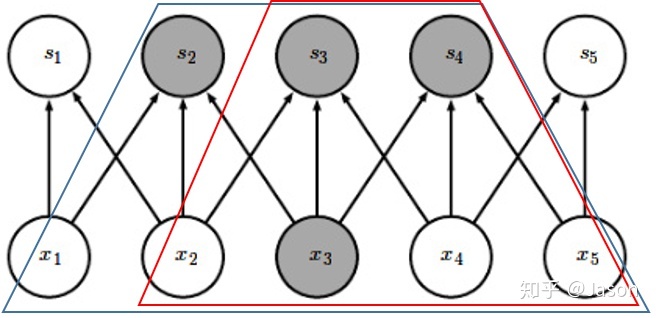
2. 参数共享
卷积运算中多个运算使用相同的参数(同一个卷积核)。而全连接中每个运算都使用自己的参数,每个参数都只使用一次
3. 等变表示
假设有平移函数
如果输入数据向某个方向平移多少个单位,卷积操作输出数据同样向同一个方向移动同样的单位长度
3 卷积的变体
3.1 多通道卷积
针对多通道输入以及多通道输出,卷积操作变体如下:
其中:
-
:第
通道的
行
列的输出值
-
:第
通道的
行
列的输入值
-
:第
个卷积核的第
通道的
行
列的输入值
3.2 调整卷积步幅
调整步幅,假设stride=s,那么卷积公式变体如下:
3.3 原始图象不同填充方法
- valid卷积:卷积核只允许访问V中能够完整包含卷积核的位置,这种操作会缩小输出尺寸,缩小大小为
,例如卷积核为3x3,那么长宽分别缩小2,2
- same卷积:为了保证输出尺寸不变,输入的图像先用0填充,保证输出的shape和输入的实际shape一样
- full卷积:上面的操作都会导致边缘像素被访问的次数变少,也就相当于忽略了弱化了边缘像素的作用,所以full卷积就是保证每个像素被访问次数都是一致的。所以输出图像的宽度=m+k-1
4 卷积求导
结合以上几种卷积变体,卷积前向通用公式如下:
在反向传播过程中会得到该输出的误差为:
4.1 针对卷积核求导
为了更好理解,这里假设输入输出通道数=1,stride=1,所以:
所以,上述也是卷积操作,输入
4.2 针对输入求导
为了更好理解,这里假设输入输出通道数=1,stride=1,所以:
同样也属于卷积操作,上述过程类似下图:


















 1148
1148

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









