







 本文介绍了手持GPS坐标设置在Visual-Wheel-GPS Localization中的应用,详细阐述了坐标系、系统状态、外参数以及GPS更新过程。在系统中,GPS数据与轮速、图像数据的时间同步问题通过滑动窗口解决,初始位置设为0,yaw角的初始方差较大以加速收敛。实验测试使用了KAIST数据集,结果显示融合定位轨迹与GPS数据的对比。
本文介绍了手持GPS坐标设置在Visual-Wheel-GPS Localization中的应用,详细阐述了坐标系、系统状态、外参数以及GPS更新过程。在系统中,GPS数据与轮速、图像数据的时间同步问题通过滑动窗口解决,初始位置设为0,yaw角的初始方差较大以加速收敛。实验测试使用了KAIST数据集,结果显示融合定位轨迹与GPS数据的对比。
接上一篇MSCKF-Based Visual Wheel Odometry (VWO-MSCKF),这篇文章接入了GPS信息,来实现全局定位。
实现方法参考了Guoquan Huang老师组里的论文:
W. Lee, K. Eckenhoff, P. Geneva and G. Huang, "Intermittent GPS-aided VIO: Online Initialization and Calibration," 2020 ICRA
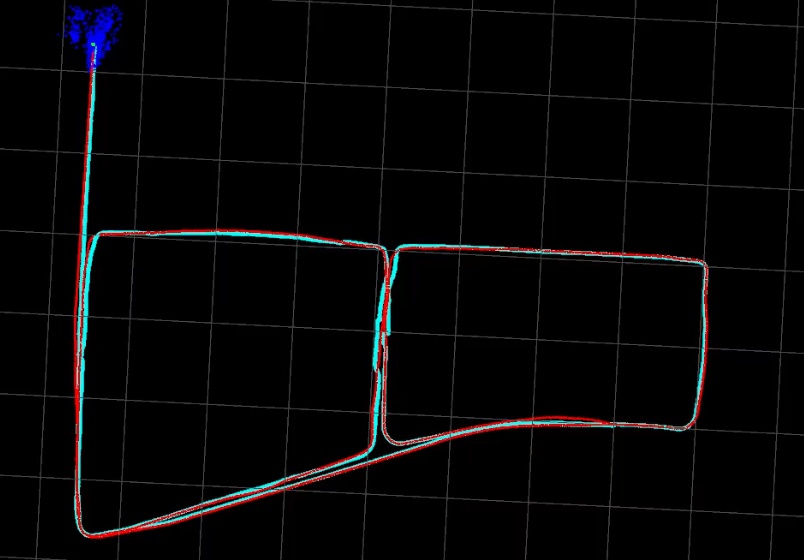
先看一下效果,红色的是融合定位轨迹,青色的是GPS数据
知乎视频www.zhihu.com代码请见:
https://github.com/ydsf16/TinyGrapeKitgithub.com坐标系
与VWO-MSCKF不同的是,这里的全局坐标系
系统状态
与VWO-MSCKF总体是相同的。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2312
2312











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









