







转载自:https://www.sohu.com/a/420714380_715754
【泡泡一分钟】间歇的GPS辅助VIO:在线初始化和标定
2020-09-25 06:30
标题: Intermittent GPS-aided VIO: Online Initialization and Calibration
作者:Woosik Lee, Kevin Eckenhoff, Patrick Geneva, and Guoquan Huang
来源: 2020 IEEE International Conference on Robotics and Automation (ICRA)
编译:杨光
审核:黄思宇,孙钦
这是泡泡一分钟推送的第 613 篇文章,欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权
摘要
本文提出一种有效而且鲁棒的GPS辅助的视觉惯导里程计(GPS-VIO)系统,该系统使用低频的GPS测量数据融合相机IMU数据。为了执行传感器融合,需要进行时空传感器标定和传感器参考帧之间的转换初始化。本文提出一种在线标定的方法对于GPS-IMU之间的外参、时间偏移以及对GPS传感器噪声具有鲁棒性的参考帧初始化步骤。此外,在VIO参考帧中进行估计时,证明了GPS-VIO系统存在四个不可观测的方向,并提出对GPS参考帧进行状态转换以实现完全可观。我们在蒙特卡罗仿真环境中广泛评估了所提出的方法,该方法中我们研究了系统对不同级别的噪声和GPS信号损失的鲁棒性并且另外研究了初始化过程中所使用的超参数。最后,在大规模的真实实验中验证了所提出的系统。

图1:带有标定的GPS-VIO(蓝色),没有标定的GPS-VIO(红色)以及VIO(黄色)仿真结果,绿色和红色方块分别对应于9.1km轨迹的起点和终点。

图2 我们集成的传感器系统由五个不同的坐标系组成:ENU坐标系,VIO坐标系,IMU坐标系,相机坐标系,以及GPS坐标系。E是GPS测量值的参考坐标系以及V是VIO设置的局部坐标系其方向与重力对齐。

图3 初始化GPS-VIO期间和之后的窗口变化。VIO在接收到第一次GPS测量之后插入关键帧,并在初始化之后边缘化关键帧,只留下标准的相机。

图4 标定误差与GPS测量噪声的大小有关。
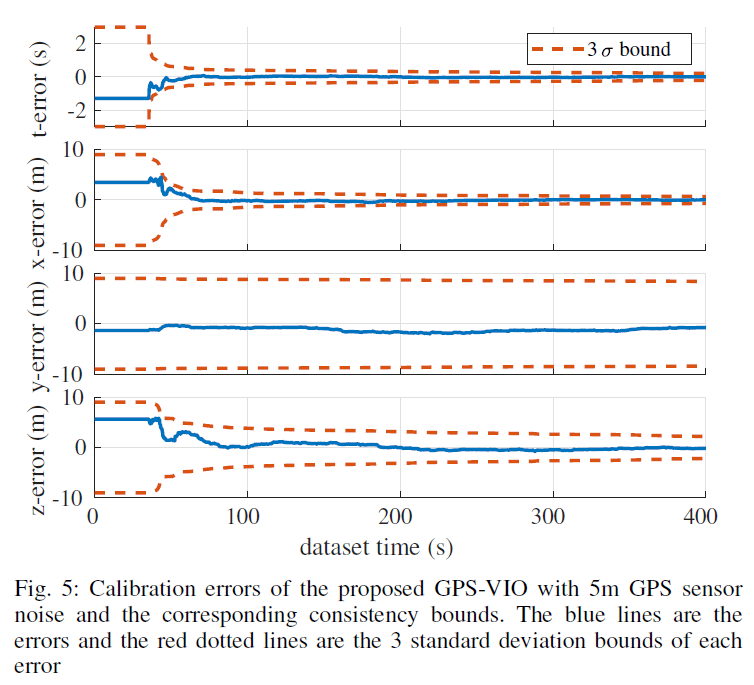
图5 5m GPS传感器噪声的GPS-VIO标定误差及相对应的一致性边界。蓝色的线误差和红色的虚线是每个误差的3个标准差界限。
表一:对于不同的初始距离和GPS噪声值(以米/度为单位),超过10次运行的平均位置和方向误差。


图 6 每种方法中对于断续GPS的位置误差。

图7 红线是在线标定的GPS-VIO,蓝色是没有在线标定的,黄线是VINS-Fusion,淡蓝色是仅仅含有VIO的,绿色是RTK GPS。绿色以及红色的盒子为轨迹的起点和终点。
Abstract
In this paper, we present an efcient and robust GPS-aided visual inertial odometry (GPS-VIO) system that fuses IMU-camera data with intermittent GPS measurements.To perform sensor fusion, spatiotemporal sensor calibration and initialization of the transform between the sensor reference frames are required. We propose an online calibration method for both the GPS-IMU extrinsics and time offset as well as a reference frame initialization procedure that is robust to GPS sensor noise. In addition, we prove the existence of four unobservable directions of the GPS-VIO system when estimating in the VIO reference frame, and advocate a state transformation to the GPS reference frame for full observability. We extensively evaluate the proposed approach in Monte-Carlo simulations where we investigate the system's robustness to different levels of GPS noise and loss of GPS signal, and additionally study the hyper-parameters used in the initialization procedure. Finally, the proposed system is validated in a large-scale real-world experiment.
百度网盘提取码:u497
泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com















 635
635











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









