







该接口基于linux提供的通用中断API接口实现。
1.流程:
gpio外部引脚发生电平变化(上升沿/下降沿)—>触发驱动层(driver.c)的中断服务函数—>在中断服务函数中通过异步消息机制通知到应用层(app.c)
2.中断响应时间测试过程:
外部引脚发生变化(绿线)时间T1 -->触发驱动层中断服务函数—>中断服务函数里通过异步通知到应用层(在应用层翻转另一个GPIO引脚(黄线)电平)时间T2 。
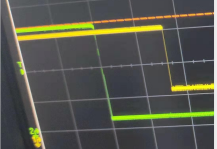
使用示波器测试响应时间:T2-T1 = 33ms左右
测试环境:ti-AM5728芯片 + linux-4.14.79-rt47-ga72bf1418
3.下面是驱动以及应用层的代码:
driver.c
#include <linux/module.h>
#include <linux/init.h>
#include <linux/types.h>
#include <linux/fs.h>
#include <linux/mm.h>
#include <linux/cdev.h>
#include <linux/errno.h>
#include <linux/sched.h>
#include <linux/device.h>
#include <asm/io.h>
#include <asm/switch_to.h>
#include <asm/uaccess.h>
#include <asm/gpio.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#define simple_MAJOR 200
static struct class *my_class;
int major;
static struct fasync_struct *fasync_queue; //异步通知队列
/*关键点!!!*/
#define GPIO_NUM GPIO_TO_PIN(3,5) //假设中断引脚为:GPIO3_5
static unsigned int irq_num;
/* 打开 */
int simple_open(struct inode *inode,struct file *filp){
return 0;
}
/* 关闭 */
int simple_release(struct inode *inode,struct file *filp){
return 0;
}
/*
简介:系统调用,应用层的read()将会调用该函数
参数:buf: 数据传输目的地址
count:传输数据长度
f_pos:偏移量
*/
ssize_t simple_read(struct file *filp,char __user *buf,size_t count,loff_t *f_pos){
return count;
}
/*
简介:系统调用,应用层的write()将会调用该函数
参数:buf: 数据传输源地址
count:传输数据长度
f_pos:偏移量
*/
ssize_t simple_write(struct file *file,const char __user *buf,size_t count,loff_t *f_pos){
return count;
}
/*fasync方法的实现*/
static int my_fasync(int fd, struct file * filp, int on)
{
int retval;
retval=fasync_helper(fd,filp,on,&fasync_queue);
/*将该设备登记到fasync_queue队列中去*/
if(retval<0)
return retval;
return 0;
}
/* 设备驱动操作结构体,该结构体的每一个成员的名字都对应着一个系统调用 */
static const struct file_operations simple_fops={
.owner=THIS_MODULE,
.open=simple_open,
.release=simple_release,
.read=simple_read,
.write=simple_write,
.fasync=my_fasync,
};
/* 在中断服务函数中向应用层发送消息-异步通知! */
void irq_callback (unsigned long date){
printk("driver irq work !!!\n");
if (fasync_queue) {
kill_fasync(&fasync_queue, SIGIO, POLL_IN);
}
}
/* 加载 */
int simple_init_module(void){
int rtn;
/* 注册相应的设备驱动 */
major = register_chrdev(0,"my_device",&simple_fops);
if(major<0){
printk("Unable to register character device %d!/n",major);
return major;
}
/* 自动创建设备节点 */
my_class = class_create(THIS_MODULE, "my_class");
device_create(my_class, NULL, MKDEV(major, 0), NULL,"my_device");
/*gpio申请*/
rtn = gpio_request(GPIO_NUM, "my_irq");
if(rtn!=0){
printk("my_irq irq pin request io failed.\n");
}
/*获取gpio中断号*/
irq_num = gpio_to_irq(GPIO_NUM);
/*GPIO中断服务函数注册,*/ /*上升沿触发*/
rtn = request_irq(irq_num, irq_callback,IRQF_TRIGGER_FALLING,"my_irq", NULL);
if (rtn<0) {
printk("my_irq request irq false\n");
} else {
printk("my_irq request irq success: %d\n",irq_num);
}
printk("module_init sucessful!!!\n");
return 0;
}
/* 卸载 */
void simple_cleanup_module(void){
/* 卸载相应的设备驱动 */
unregister_chrdev(major,"my_device");
device_destroy(my_class,MKDEV(major, 0));
class_destroy(my_class);
/*释放GPIO*/
gpio_free(GPIO_NUM);
printk("module_exit sucessful!!!\n");
}
/* 宏实现 */
module_init(simple_init_module);
module_exit(simple_cleanup_module);
/* 开源许可声明 */
MODULE_LICENSE("Dual BSD/GPL");
app.c
#include <stdio.h>
#include <fcntl.h>
#include <stdlib.h>
#include <signal.h>
#include <unistd.h>
#include <fcntl.h>
static int fd;
/* 内核产生异步通知,调用该应用层函数处理 */
void sigterm_handler(int signo)
{
printk("app irq work !!!\n");
}
int main(void)
{
int oflags;
fd=open("/dev/my_device",O_RDWR); //打开设备文件
/* 启动异步通知信号驱动机制 */
signal(SIGIO, sigterm_handler);
fcntl(fd, F_SETOWN, getpid());
oflags = fcntl(fd, F_GETFL);
fcntl(fd, F_SETFL, oflags | FASYNC);
/*建立一个死循环,防止程序结束 */
while(1)
{
printf("sleep\n");
usleep(200000); //2ms
}
close(fd);
return 0;
}














 1175
1175











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









