






先来说一下罗德里格公式的作用:已知一向量,知道旋转轴和旋转角度,可求得旋转后的向量。简单地说,知道旋转轴和旋转角度,可以求得旋转矩阵。
接下来用图解方式,给出罗德里格旋转公式的证明(理解证明,对矩阵、向量、叉乘、点乘的几何意义会有质的提高)
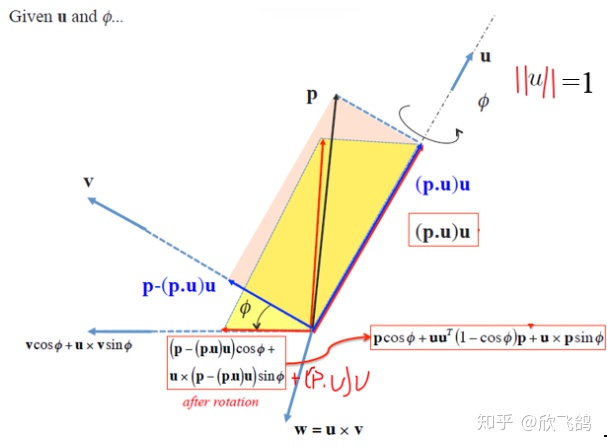
恩,接下来对这张大图,进行下分析:已知一向量p,知道旋转轴u(满足范数为1,即单位矢量),旋转角度
- 右上角蓝色的(p.u)代表p与u的内积,(p.u)u代表向量p在旋转轴上的投影,即如果把u比作z轴,则(p.u)代表向量p的z坐标的大小。
- p-(p.u)u则可以比作向量p在垂直于z轴(u)的平面上的投影,该平面上的投影矢量为v
-
,这样便根据旋转轴建立了一个坐标系(u-v-w)
- 向量p绕u轴旋转,对应u轴的坐标不变,只是垂直于u轴平面的投影矢量发生变化,变化后的投影矢量是
(这里有个疑惑,w轴上为0,为什么还要做转换处理呢)
- 将对应的u、v带入上式,并加上u轴对应坐标的矢量即
- 根据内积和叉积的运算,上式可转换成
- p向量经旋转轴、旋转角度转换后的向量为:
-
,可得罗德里格公式:

对于已知旋转矩阵,可根据如下式子求旋转轴和旋转角度:
式中
SO(3)的指数坐标:

根据

可见SO(3)的指数坐标形式和罗德里格旋转公式是一样的。并可以进一步推导出
该式恰好等于
好了,写这么多,只是想说明一点:冥冥之中这些知识有相通之处~
更多无人机知识分享,请关注微信公众号:欣飞鸽开心飞翔,灵动如鸽。愿与无人机爱好者,共创一片蓝天梦!















 3755
3755











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









