





## 6.6.1
设:
同理:
即证。
## 6.6.2
根据式(6.87):
因为:
故:
因此:
## 6.6.3
设旋转矩阵C:
旋转矩阵C:
因此:
因此:
即证
## 6.6.3
根据式(6.77):
根据式(6.93):
对上式乘以
对上式求转置:
对上式乘
根据式(6.3)推断:
因此:
根据式(6.96):
<0>式:
即证
## 6.6.5
根据式(6.96):
由于在二维平面中z=0:
根据式(6.95)
二维平面只有绕z轴一个转角:
## 6.6.6
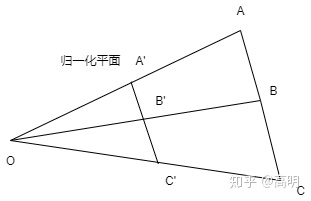
如上图,三维空间点A,B,C,相机光心O,在归一化平面分别为$A',B',C'$,图上的点均共面,易知A',B',C'共线
根据参考文献参考文献【1】定理1.10:
只要存在3*3非奇异矩阵,就可以保证归一化平面共线点映射到图像平面依然共线
根据(6.113):
这里的H矩阵为内参矩阵K,K非奇异。
## 6.6.7
根据式(6.131):
矩阵求逆
因此:
根据式(6.126):
根据式(6.120):
因此:
其中:
根据(6.124):
将
坐标之间满足如下关系:
带入上式:
将<1>带入<0>:
因此:
## 6.6.8
根据图6-11和式(6.135),(6.136):
当采取以右侧相机为中心时:
根据式(6.141)引入视差:
## 6.6.9
根据式(6.142):
可得:
### 6.6.10
略(可参考任何一本惯性导航专著)
源码与完整版pdf已经同步更新,地址:
https://github.com/mingtiancai/estimation_for_robotics_answer/tree/master/csgithub.com参考文献:
【1】Multiple View Geometry in Computer Vision















 2681
2681











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









