







大家好,我是尤斯提安娜·冯·阿斯特莱亚的公主骑士Dantemiwa(划掉)。
上次的文章讲了传统PI电流环为什么要按给定最佳准则整定,以及如何按照带宽整定PI电流环的参数。
https://zhuanlan.zhihu.com/p/146373628zhuanlan.zhihu.com今天继续重复造轮子,讲讲速度环参数的整定。
速度环和电流环共同构成了大佬们常说的“速度-电流双闭环系统”。在上一篇文章中讲到,按照带宽整定的电流环的闭环传递函数为:

其中,
于是,传统PI速度环的框图可以表示为:
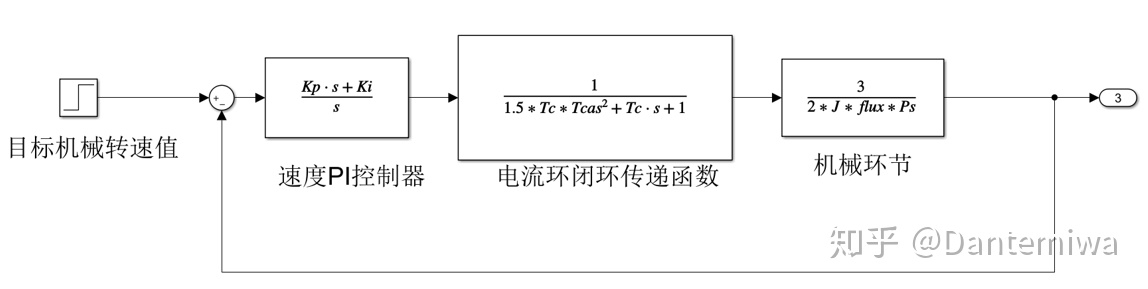
这个机械环节是怎么来的呢?首先,我们有SPMSM的电磁转矩公式:

其中P为转子极对数,
在这个背景下,为了实现最大扭矩控制,就会采用

从上式都可以得到两个结论,在空载的情况下,电机的转矩和加速度之间的关系为:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 7266
7266











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









