





2 基于CCP协议的接口程序实现
基于CCP协议进行标定,需要MCS与ECU的应用程序都能够支持CCP协议,这部分应用程序称为CCP driver。本文采用Vector提供的free CCP driver[2]。由于CCP协议基于CAN总线,因此CCP driver与ECU的结合主要分为与CAN driver及与其他应用程序两方面。
CCP driver与CAN driver的结合如图3,主要分为以下两方面:
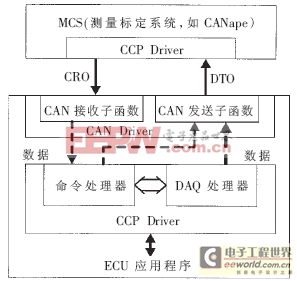
图3 CCP标定程序接口
·发送端:DTO通过CAN driver的发送子函数以CAN报文的格式上传给MCS。
·接收端:主设备发送的命令以CAN报文的格式首先进入CAN driver的接收子函数,由其判断为CRO后,进一步交给命令处理器处理。
命令处理器作为CCP driver的一个主要组成部分,负责将接收到的CRO,通过其CRM代码进行命令解释,执行相应操作,组织反馈数据并调用CAN发送子函数。DAQ处理器支持DAQ工作模式,当命令处理器判断收到的命令为DAQ请求后,进一步将数据传给DAQ处理器,由DAQ处理器组织数据并直接调用CAN 发送子函数,以DAQ-DTO的形式定期向主设备上传。
基于CCP协议的基本CAN通信流程如图4所示。ECU接收到报文后,转入CAN接收子函数,在常规接收流程后,对报文的ID标识符进行判断,如为CRO_ID,则将CCP标志位(Ccp_indicator)置位。由于采用中断方式接收报文,为了避免占用过多中断时间而影响其他函数或中断级别较低的程序运行,在对ID标识符进行判断后,并不直接在函数中调用CCP driver的命令处理器。命令处理器的调用会在主函数中进行。
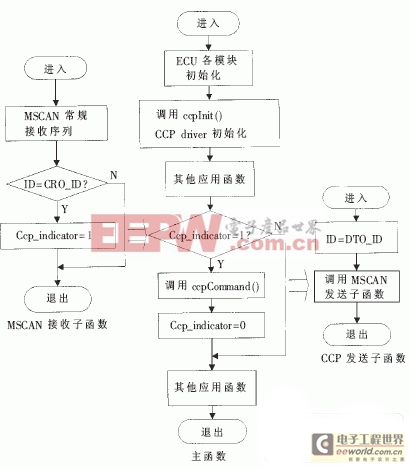
图4 接口程序基本流程图
主函数通过判断标志位的状态,调用CCP driver的ccpCommand()子函数。该函数是命令处理器的主要组成部分,也是命令处理器与CAN driver的接口函数,它负责解释并执行收到的CRO命令,调用CCP driver中的其他函数,进行数据处理并组织需要反馈的数据。
ccpCommand()通过调用CAN driver中的CCP发送子函数ccpSend()发送一帧DTO。ccpSend()须在CAN driver中实现,由CCP driver调用。按实际情况,将CAN发送子函数直接以ccpSend()的形式实现,或在保留原有发送子函数的基础上添加一个ccpSend()子函数,在其中调用CAN发送子函数,以完成DTO的发送。
CCP协议为确保主设备与ECU之间正常通信,每次发送后,程序必须通过调用CCP driver中的ccpSendCallback()子函数检查刚才的DTO是否已经发送,否则不能发送下一帧报文。针对不同的CAN driver实现,该函数调用的位置不同。最后主函数将CCP标志位清空,等待下一条CRO命令。
一个完整的CCP driver 接口还包括与ECU其他应用程序的接口。每次单片机初始化后,主函数调用一次CCP driver的CCP初始化子函数ccpInit(),将上次标定残留在ECU内存中的数据清空,为下次标定与测量做准备。















 2981
2981











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









