







模型预测控制(Model Predictive Control,MPC)是在满足特定限制条件的前提下,控制过程的一种控制方式。
若是针对简单系统的控制,多半不需要用到复杂的MPC算法,使用PID控制器即可,如下图所示;当系统有较大的响应延迟或是高阶系统时,其控制特性会复杂到超过PID控制器可控制的程度,而MPC的模型恰恰是用来呈现复杂系统的特性。
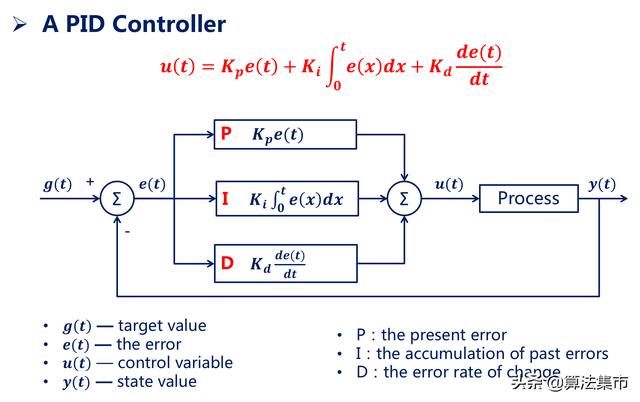
PID控制器
PID控制介绍:比例、积分、微分
为避免在刚开始学习MPC时,就陷入复杂的理论中,这里用一个骑行的小例子对MPC的基本思想进行解释。

假设我们要求骑行100公里
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2685
2685











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









