





1 任务描述
在使用Moveit对机械臂运动进行规划时,我们定义Pose,然后规划,目标位姿Pose的定义代码如下:
target_pose = PoseStamped()
target_pose.header.frame_id = reference_frame
target_pose.header.stamp = rospy.Time.now()
target_pose.pose.position.x = -0.545
target_pose.pose.position.y = 0.426
target_pose.pose.position.z = 0.267
target_pose.pose.orientation.x = -0.628
target_pose.pose.orientation.y = 0.226
target_pose.pose.orientation.z = 0.708
target_pose.pose.orientation.w = 0.230 2 错误表现
这里面xyz的定义是没有问题的,但是姿态这么定义有问题,查看源代码这里的orientation是单位四元数的表示,然而规划也总是失败的。具体表现为无论你定义为多少姿态总是运动到四元数为[0 0 0 1]的姿态位置。就是下面这个姿态

3 原因分析
经过查找原因是数据格式问题,我具体的操作方法是在rviz界面拖动机械臂到预定位置,然后使用 tf_echo 查看坐标变换数值,然后把这个Quaternion数值输入上面定义的位置,如下图
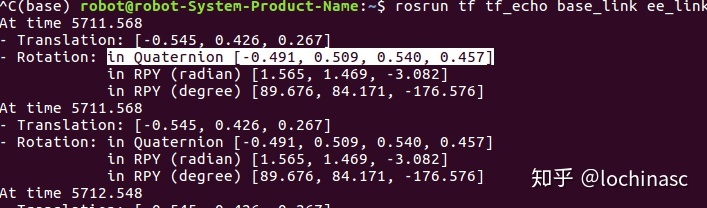
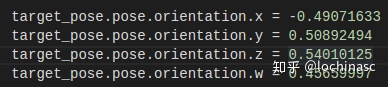
问题就出在这里,这里显示的变换四元数只保留了三位小数,而实际应该是8位小数,如下图形式
4 解决办法步骤
- rviz中拖动机械臂到合适位置,“Plan and Execute”使机械臂运动到目标位姿
- 运行下面代码查看目标位姿的pose表示
rosrun tf tf_echo 参考坐标系 目标坐标系- 使用里面的 In RPY 数值,求解四元数(需要自己写代码),然后把这个四元数赋值给姿态数值
r, p, y = 1.567, 1.469, -3.080 # tf_echo 中查看的弧度表示
rm = ax2rm(r, p, y) # 弧度2旋转矩阵
goal_quat = rm2q(rm) # 旋转矩阵2四元数
target_pose = PoseStamped()
target_pose.header.frame_id = reference_frame
target_pose.header.stamp = rospy.Time.now()
target_pose.pose.position.x = -0.545
target_pose.pose.position.y = 0.426
target_pose.pose.position.z = 0.267
target_pose.pose.orientation.x = goal_quat[0]
target_pose.pose.orientation.y = goal_quat[1]
target_pose.pose.orientation.z = goal_quat[2]
target_pose.pose.orientation.w = goal_quat[3]5感悟
!!!当你代码流程没有问题,却怎么也找不到解决办法时,可以好好检查下使用到的数据格式是否一致正确















 608
608











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









