







1、简介
该部分将对基本的几何变换进行学习,几何变换的原理大多都是相似,只是变换矩阵不同,因此,我们以最常用的平移和旋转为例进行学习。在深度学习领域,我们常用平移、旋转、镜像等操作进行数据增广;在传统CV领域,由于某些拍摄角度的问题,我们需要对图像进行矫正处理,而几何变换正是这个处理过程的基础,因此了解和学习几何变换也是有必要的。
2、算法理论介绍
a、仿射变换
原理
仿射变换(Affine Transformation)是指在向量空间中进行一次线性变换(乘以一个矩阵)和一次平移(加上一个向量),变换到另一个向量空间的过程。仿射变换代表的是两幅图之间的映射关系。
我们通常使用 2x3 矩阵来表示仿射变换.如下图中的矩阵M,其中的B起着 平移 的作用,而A中的对角线决定 缩放,反对角线决定 旋转 或 错切。
所以仿射变换可以由一个矩阵A和一个向量B给出:
原像素点坐标(x,y),经过仿射变换后的点的坐标是T,则矩阵仿射变换基本算法原理:
![[公式]](https://img-blog.csdnimg.cn/20200423223833629.png)
所以仿射变换是一种二维坐标(x, y)到二维坐标(u, v)的线性变换,其数学表达式如下:
![[公式]](https://img-blog.csdnimg.cn/20200423223850420.png)
其实到这里还没完,我们知道缩放和旋转通过矩阵乘法来实现,而平移是通过矩阵加法来实现的,为了将这几个操作都通过一个矩阵来实现,所以构造出了上面那个 2x3 的矩阵。
但是这个会改变图像的尺寸,比如一个 2x2 的图像,乘以 2x3 的矩阵,会得到 2x3 的图像,所以为了解决这个问题,我们就增加一个维度,也就是构造齐次坐标矩阵。
仿射变换保持了二维图像的“平直性”和“平行性”:
平直性:
- 直线经仿射变换后还是直线
- 圆弧经仿射变换后还是圆弧
平行性:
- 直线之间的相对位置关系保持不变
- 平行线经仿射变换后依然为平行线
- 直线上点的位置顺序不会发生变化
- 向量间夹角可能会发生变化
b、变换形式
先看第一个问题,变换的形式。与OpencV不同的是这里采取冈萨雷斯的《数字图像处理_第三版》的变换矩阵方式,关于OpenCV的策略可以看它的官方文档。根据冈萨雷斯书中的描述,仿射变换的一般形式如下: 式中的T就是变换矩阵,其中 (v,w)为原坐标,(x,y) 为变换后的坐标,不同的变换对应不同的矩阵,这里也贴出来吧,一些常见的变换矩阵及作用如下表:
式中的T就是变换矩阵,其中 (v,w)为原坐标,(x,y) 为变换后的坐标,不同的变换对应不同的矩阵,这里也贴出来吧,一些常见的变换矩阵及作用如下表:
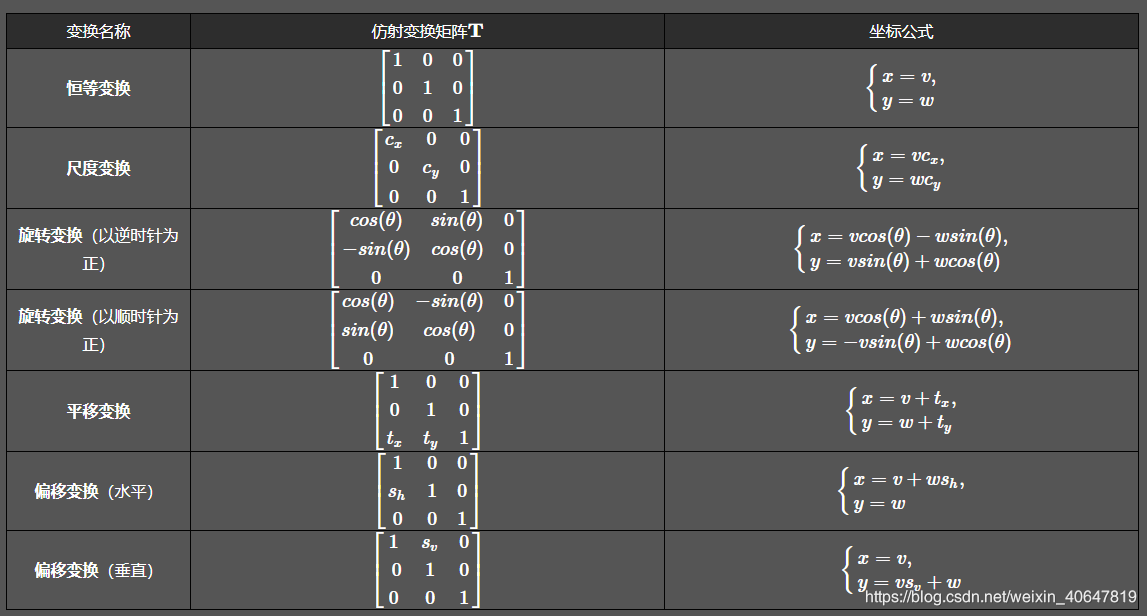
也就是说,我们根据自己的目的选择不同变换矩阵就可以了。
c、坐标轴变换
再看第二个问题,变换中心,对于缩放、平移可以以图像坐标原点(图像左上角为原点)为中心变换,这不用坐标系变换,直接按照一般形式计算即可。而对于旋转和偏移,一般是以图像中心为原点,那么这就涉及坐标系转换了。
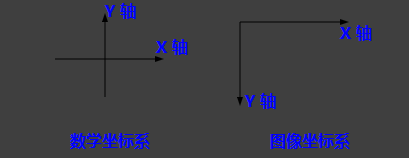
我们都知道,图像坐标的原点在图像左上角,水平向右为 X 轴,垂直向下为 Y 轴。数学课本中常见的坐标系是以图像中心为原点,水平向右为 X 轴,垂直向上为 Y 轴,称为笛卡尔坐标系。看下图:
因此,对于旋转和偏移,就需要3步(3次变换):
- 将输入原图图像坐标转换为笛卡尔坐标系;
- 进行旋转计算。旋转矩阵前面已经给出了;
- 将旋转后的图像的笛卡尔坐标转回图像坐标。
图像坐标系与笛卡尔坐标系转换关系:
先看下图:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 342
342











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









