







一、话题发布
1、通过自带的程序,使用键盘控制乌龟的运动
打开终端,启动roscore
竖直分屏,输入:rosrun turtlesim turtlesim_node,程序运行后会出现小乌龟
水平分屏,输入:rosrun turtlesim turtle_teleop_key,程序运行后,可以通过上下左右键控制小乌龟。
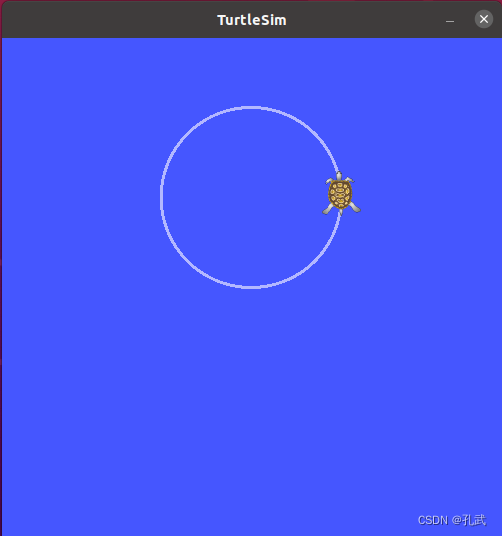
2、编写程序,是的乌龟做圆周运动
1、右击最外层src,点击“Create Catkin Package”,新建功能包:plumbing_test.
2、添加依赖:roscpp rospy std_msgs geometry_msgs
3、在功能包中的src文件夹下新建文件:命名为:test01_pub_twist.cpp
3、编写程序:
#include "ros/ros.h"
#include "geometry_msgs/Twist.h"
/*
需求:发布速度消息
话题:/turtle1/cmd_vel
消息:geometry_msgs/Twist
//1、导入包
//2、初始化 ROS 节点
//3、创建节点句柄
//4、创建发布对象
//5、发布逻辑
//6、spinOnce()
*/
int main(int argc,char *argv[])
{
//2、初始化 ROS 节点
ros::init(argc,argv,"my_control");
//3、创建节点句柄
ros::NodeHandle nh;
//4、创建发布对象
ros::Publisher pub=nh.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel",10);
//5、发布逻辑
ros::Rate rate(10);//设置发布频率
//组织被发布的消息
geometry_msgs::Twist twist;
twist.linear.x=1.0;
twist.linear.y=0.0;
twist.linear.z=0.0;
twist.angular.x=0.0;
twist.angular.y=0.0;
twist.angular.z=0.5;
//循环发布
while(ros::ok()){
pub.publish(twist);
//休眠
rate.sleep();
//回头
//6.spinOnce()
ros::spinOnce();
}
//6、spinOnce()
return 0;
}4、配置文件
add_executable(test01_pub_twist src/test01_pub_twist.cpp)add_dependencies(test01_pub_twist ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})target_link_libraries(test01_pub_twist
${catkin_LIBRARIES}
)5、查看结果
5.1、启动终端,打开roscore
5.2、竖直分屏,输入:rosrun turtlesim turtlesim_node
5.3、水平分屏,输入:cd demo03_ws
source ./devel/setup.bash
rosrun plumbing_test test01_pub_twist
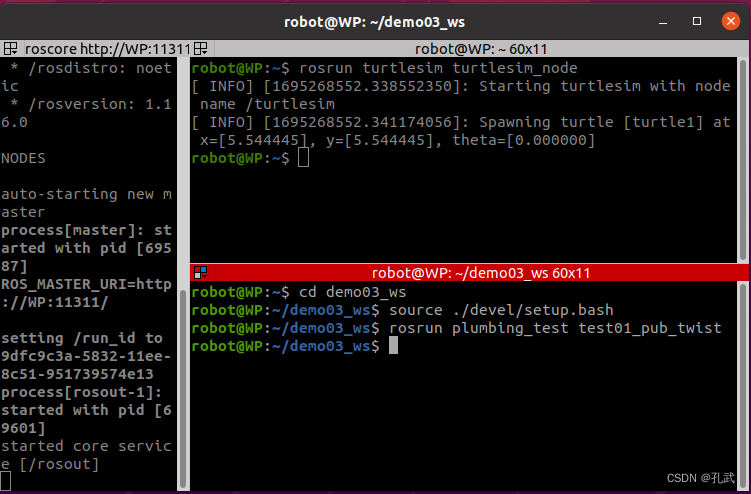
得到如下结果:
二、话题订阅
1、编写程序:
#include "ros/ros.h"
#include "turtlesim/Pose.h"//位姿相关的头文件
/*
需求:订阅乌龟的位姿信息,并输出到控制台
//1、包含头文件
//2、初始化ROS 节点
//3、创建节点句柄
//4、创建订阅对象
//5、处理订阅到的数据(回调函数)
//6、spin()
*/
void doPose(const turtlesim::Pose::ConstPtr &pose)
{
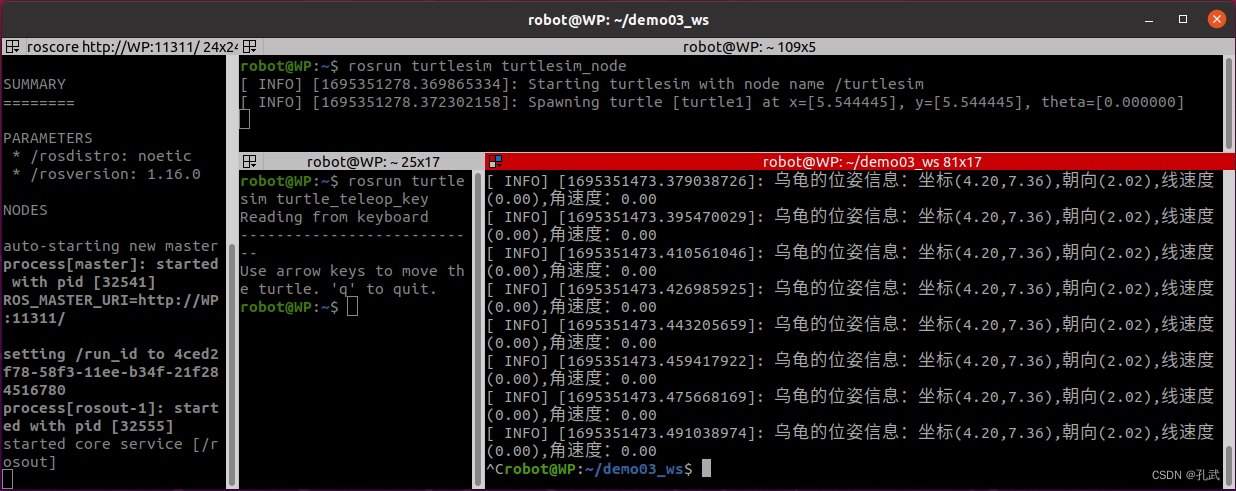
ROS_INFO("乌龟的位姿信息:坐标(%.2f,%.2f),朝向(%.2f),线速度(%.2f),角速度:%.2f",
pose->x,pose->y,pose->theta,pose->linear_velocity,pose->angular_velocity);
}
int main(int argc,char * argv[])
{
setlocale(LC_ALL,"");
// 2、初始化ROS 节点
ros::init(argc,argv,"sub_pose");
// 3、创建节点句柄
ros::NodeHandle nh;
// 4、创建订阅对象
ros::Subscriber sub =nh.subscribe("/turtle1/pose",100,doPose);
// 5、处理订阅到的数据(回调函数)
// 6、spin()
ros::spin();
return 0;
}
2、修改配置文件
在最后一行,添加turtlesim
find_package(catkin REQUIRED COMPONENTS
geometry_msgs
roscpp
rospy
std_msgs
turtlesim
)add_executable(test01_pub_twist src/test01_pub_twist.cpp)
add_executable(test02_sub_pose src/test02_sub_pose.cpp)add_dependencies(test01_pub_twist ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
add_dependencies(test02_sub_pose ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})target_link_libraries(test01_pub_twist
${catkin_LIBRARIES}
)
target_link_libraries(test02_sub_pose
${catkin_LIBRARIES}
)3、查看结果
三、服务调用(p110-113)_生成一个新的乌龟
0、使用命令 的形式完成任务
在VScode中启动终端,执行launch 文件,调出乌龟界面
输入:rosservice list 调出服务,结果如图所示:
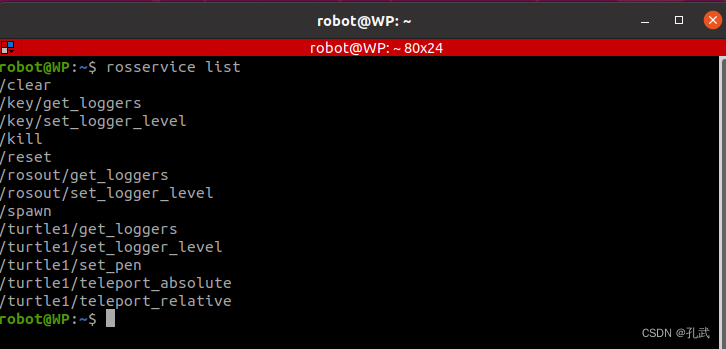
输入:rosservice call /spawn,按下两次tab键,自动补齐,出现坐标信息,可以对其修改。
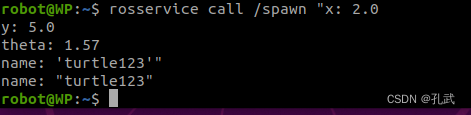
按下回车键,出现一个新的乌龟。

1、新建文件
在src中新建文件,命名为:test03_service_client.cpp
2、编写程序
#include "ros/ros.h"
#include "turtlesim/Spawn.h"
/**
* 需求:向服务端发送请求,
* 服务:/spawn
* 请求:turtlesim
1、导入头文件
2、初始化ros节点
3、创建节点句柄
4、创建客户端对象
5、组织数据并发送
6、处理响应
*/
int main(int argc,char *argv[])
{
setlocale(LC_ALL,"");
// 2、初始化ros节点
ros::init(argc,argv,"service_call");
// 3、创建节点句柄
ros::NodeHandle nh;
// 4、创建客户端对象
ros::ServiceClient client =nh.serviceClient<turtlesim::Spawn>("/spawn");
// 5、组织数据并发送
//5.1、组织请求数据
turtlesim::Spawn spawn;
spawn.request.x=1.0;
spawn.request.y=4.0;
spawn.request.theta=1.57;
spawn.request.name="xiaoWuGui";
//5.2、发送请求
//在发送请求之前判断服务器状态。如果服务端没有开启,则挂起等待。
//ros::service::waitForService("/spawn");
client.waitForExistence();
bool flag=client.call(spawn);//flag接收响应状态,响应结果也会被设置进入spwan对象中
// 6、处理响应
if (flag)
{
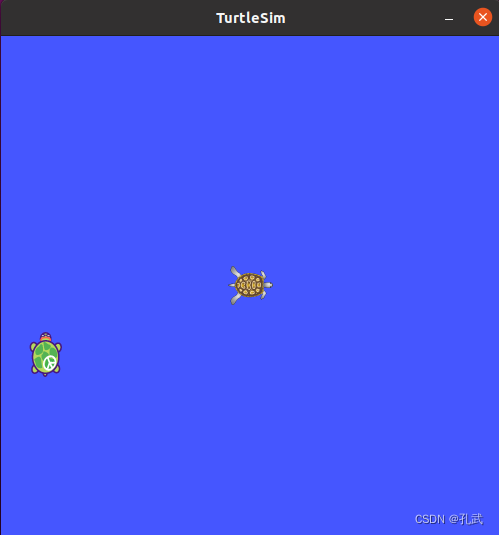
ROS_INFO("乌龟生成成功,新乌龟叫:%s",spawn.response.name.c_str());
}else{
ROS_INFO("请求失败!!!");
}
return 0;
}3、修改配置文件
add_executable(test01_pub_twist src/test01_pub_twist.cpp)
add_executable(test02_sub_pose src/test02_sub_pose.cpp)
add_executable(test03_service_client src/test03_service_client.cpp)add_dependencies(test01_pub_twist ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
add_dependencies(test02_sub_pose ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
add_dependencies(test03_service_client ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})target_link_libraries(test01_pub_twist
${catkin_LIBRARIES}
)
target_link_libraries(test02_sub_pose
${catkin_LIBRARIES}
)
target_link_libraries(test03_service_client
${catkin_LIBRARIES}
)4、查看结果
4.1、ctrl+shit+b编译;ctrl+alt+t ,启动终端,打开roscore
4.2、竖直分屏,输入:rosrun turtlesim turtlesim_node
4.3、水平分屏,输入:cd demo03_ws
source ./devel/setup.bash
rosrun plumbing_test test03_service_client
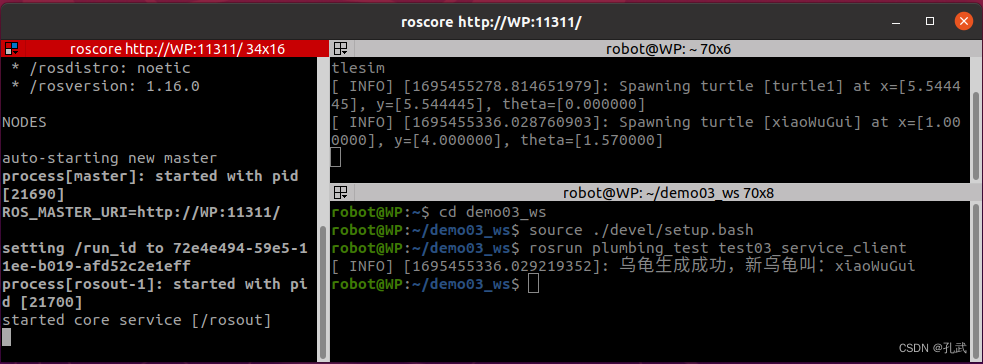 结果
结果


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









