







源代码gitee:https://gitee.com/sldwlk_admin/vslamlesson
欢迎收藏 ^ ^ 一起交流
ORB特征点
问题1:ORB提取
程序思路
- 判断是否在边界,如果在就跳过
- 计算图片在x、y方向的重心,这里要注意坐标原点时在局部图片的中心位置
- 用std::atan2计算重心夹角
核心代码
// compute the angle
void computeAngle(const cv::Mat &image, vector<cv::KeyPoint> &keypoints) {
int half_patch_size = 8;
for (auto &kp : keypoints) {
// START YOUR CODE HERE (~7 lines)
kp.angle = 0;
int cols = image.cols;
int rows = image.rows;
int u = kp.pt.x;
int v = kp.pt.y;
//边界判断
if(u - 8 < 0 || v - 8 < 0 || u + 7 > cols - 1 || v + 7 > rows - 1)
continue;
//计算重心
int m10 = 0;
int m01 = 0;
for(int i = u - 8; i < u + 8; i++)
{
for(int j = v - 8; j < v + 8; j++)
{
m10 += (i - u)*image.at<unsigned char>(j, i);
m01 += (j - v)*image.at<unsigned char>(j, i);
}
}
//计算角度
kp.angle = std::atan2(m01, m10);
kp.angle = kp.angle/3.1415926*180;
// END YOUR CODE HERE
}
return;
}
CMake
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
add_executable(computeORB computeORB.cpp)
target_link_libraries(computeORB ${OpenCV_LIBRARIES})
运行结果


问题2:ORB描述
程序思路
- 计算旋转后的pq坐标
- 判断pq坐标是否越界
- 判断pq两点位置图像像素值大小设置描述符
核心代码
// compute the descriptor
void computeORBDesc(const cv::Mat &image, vector<cv::KeyPoint> &keypoints,
vector<DescType> &desc) {
for (auto &kp : keypoints) {
DescType d(256, false);
for (int i = 0; i < 256; i++) {
// START YOUR CODE HERE (~7 lines)
int cols = image.cols;
int rows = image.rows;
float theta = kp.angle/180.0*3.1415926;
int up = ORB_pattern[i*4 + 0];
int vp = ORB_pattern[i*4 + 1];
int uq = ORB_pattern[i*4 + 2];
int vq = ORB_pattern[i*4 + 3];
int up_ = up*cos(theta) - vp*sin(theta) + kp.pt.x;
int vp_ = up*sin(theta) + vp*cos(theta) + kp.pt.y;
int uq_ = uq*cos(theta) - vq*sin(theta) + kp.pt.x;
int vq_ = uq*sin(theta) + vq*cos(theta) + kp.pt.y;
if(up_ < 0 || up_ > cols - 1 || vp_ < 0 || vp_ > rows - 1 || uq_ < 0 || uq_ > cols - 1 || vq_ < 0 || vq_ > rows - 1)
{
d.clear();
break;
}
if(image.at<unsigned char>(vp_, up_) - image.at<unsigned char>(vq_, uq_) < 0)
//前者小,记1
d.at(i) = true;
else
d.at(i) = false;
// END YOUR CODE HERE
}
desc.push_back(d);
}
int bad = 0;
for (auto &d : desc) {
if (d.empty())
bad++;
}
cout << "bad/total: " << bad << "/" << desc.size() << endl;
return;
}
运行结果

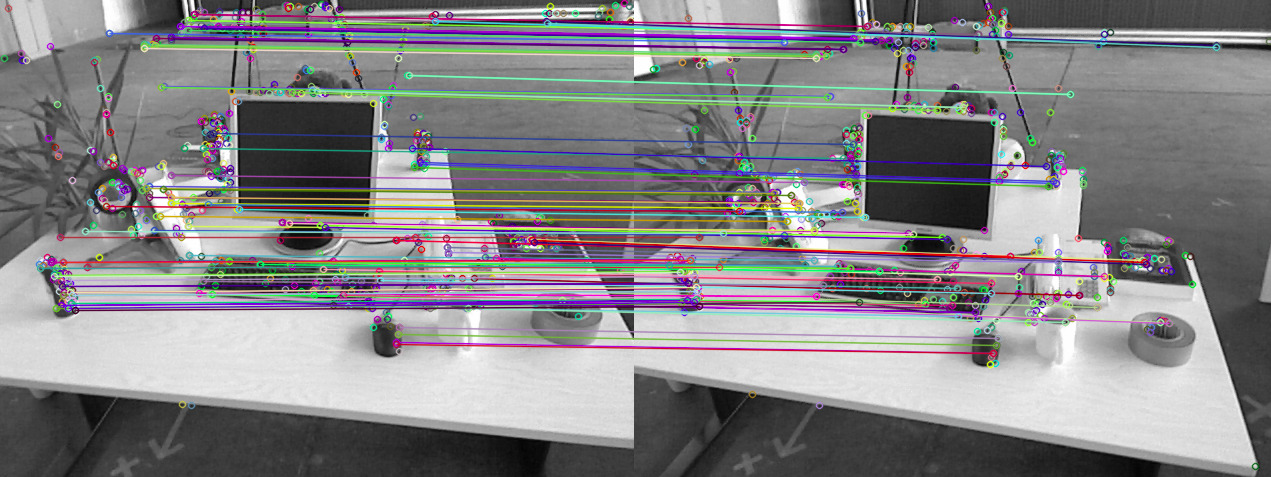
问题3:暴力匹配
程序思路
- 判断每个待查询的的描述符是否为空
- 为每个非空的待查询描述符遍历一遍另一个图像的所有非空描述符,得到距离最小的一个
- 距离计算方法(汉明距离):存在一个符号相反的二进制位,距离+1
- 距离如果小于阈值,则认为匹配成功,存入到结果中
核心代码
// brute-force matching
void bfMatch(const vector<DescType> &desc1, const vector<DescType> &desc2,
vector<cv::DMatch> &matches) {
int d_max = 50;
// START YOUR CODE HERE (~12 lines)
// find matches between desc1 and desc2.
for(int i = 0; i < desc1.size(); i++)
{
DescType d1 = desc1[i];
//判断此描述符是否为空
if(d1.empty())
continue;
//寻找距离最短的匹配点
int minDIst = d_max + 1;
int minIndex;
for(int j = 0; j < desc2.size(); j++)
{
DescType d2 = desc2[j];
int theDist = 0;
if(d2.empty())
continue;
for(int i = 0; i < d1.size() && i < d2.size(); i++)
{ //计算汉明距离
if(d1[i] != d2[i])
theDist++;
}
if(theDist < minDIst)
{
minDIst = theDist;
minIndex = j;
}
}
//如果最小距离小于阈值,就把它加入进去
if(minDIst <= d_max)
{
cv::DMatch theMatch;
theMatch.distance = minDIst;
theMatch.queryIdx = i;
theMatch.trainIdx = minIndex;
matches.push_back(theMatch);
}
}
// END YOUR CODE HERE
for (auto &m : matches) {
cout << m.queryIdx << ", " << m.trainIdx << ", " << m.distance << endl;
}
return;
}
运行结果
问题4:多线程ORB
程序思路
- 参照群里文件tbb+gcc.txt安装gcc11 g++11 tbb
- 将原有单线程内容移植到foreach结构中
- 对于ORB描述部分,由于多线程是无序的,因此不能使用vector的push_back函数,需要记录每个描述的关键点的index,并按位置放入到ORB描述的vector中
核心代码
//角度计算
void computeAngleMT(const cv::Mat &image, vector<cv::KeyPoint> &keypoints) {
int half_patch_size = 8;
//开启多线程,并行计算角度
std::for_each(std::execution::par_unseq, keypoints.begin(), keypoints.end(),
[&half_patch_size, &image](auto &kp) {
// START YOUR CODE HERE
kp.angle = 0;
int cols = image.cols;
int rows = image.rows;
int u = kp.pt.x;
int v = kp.pt.y;
if(u - 8 < 0 || v - 8 < 0 || u + 7 > cols - 1 || v + 7 > rows - 1)
{ //位于边界,直接跳过
}
else
{
int m10 = 0;
int m01 = 0;
for(int i = u - 8; i < u + 8; i++)
{
for(int j = v - 8; j < v + 8; j++)
{
m10 += (i - u)*image.at<unsigned char>(j, i);
m01 += (j - v)*image.at<unsigned char>(j, i);
}
}
kp.angle = std::atan2(m01, m10);
kp.angle = kp.angle/3.1415926*180;
}
// END YOUR CODE HERE
});
return;
}
//特征描述
void computeORBDescMT(const cv::Mat &image, vector<cv::KeyPoint> &keypoints,
vector<DescType> &desc) {
// START YOUR CODE HERE (~20 lines)
//提前开辟特征描述数组容量
desc.resize(keypoints.size());
vector<int> kpIndexs;
//记录每个特征点的下标
for(int i = 0; i < keypoints.size(); i++)
kpIndexs.push_back(i);
//开启多线程,并行计算并存储特征描述
std::for_each(std::execution::par_unseq, kpIndexs.begin(), kpIndexs.end(),
[&desc, &image, &keypoints](auto &kpindex) {
// START YOUR CODE HERE
cv::KeyPoint kp = keypoints[kpindex];
DescType d(256, false);
//计算特征描述,保存在d中
for (int i = 0; i < 256; i++) {
int cols = image.cols;
int rows = image.rows;
float theta = kp.angle/180.0*3.1415926;
int up = ORB_pattern[i*4 + 0];
int vp = ORB_pattern[i*4 + 1];
int uq = ORB_pattern[i*4 + 2];
int vq = ORB_pattern[i*4 + 3];
int up_ = up*cos(theta) - vp*sin(theta) + kp.pt.x;
int vp_ = up*sin(theta) + vp*cos(theta) + kp.pt.y;
int uq_ = uq*cos(theta) - vq*sin(theta) + kp.pt.x;
int vq_ = uq*sin(theta) + vq*cos(theta) + kp.pt.y;
if(up_ < 0 || up_ > cols - 1 || vp_ < 0 || vp_ > rows - 1 || uq_ < 0 || uq_ > cols - 1 || vq_ < 0 || vq_ > rows - 1)
{
d.clear();
break;
}
if(image.at<unsigned char>(vp_, up_) - image.at<unsigned char>(vq_, uq_) < 0)
//前者小,记1
d.at(i) = true;
else
d.at(i) = false;
}
//按照下标放入到数组中
desc[kpindex] = d;
// END YOUR CODE HERE
});
// END YOUR CODE HERE
}
运行结果

一些小问题
- 为什么说 ORB 是一种二进制特征?
因为它的特征描述符是通过比较产生的,每一次比较对会产生一个二进制描述位(true或flase)
- 为什么在匹配时使用 50 作为阈值,取更大或更小值会怎么样?
一共存在256个描述符,取50个作为阈值在一个合理的范围,可以过滤掉大部分误匹配,取更大的数值可能会增加误匹配的情况,取更小的数值则会减少正确的匹配数量。
- 暴力匹配在你的机器上表现如何?你能想到什么减少计算量的匹配方法吗?
暴力匹配用时将近10s,如果图像位移不大,或者引入一个图像位姿移动的先验,降低在图片上暴力搜索的范围。
- 多线程版本相比单线程版本是否有提升?在你的机器上大约能提升多少性能?
对于耗时较长的算法会有提升,在计算orb特征描述部分,速度提升了7倍,但是对于耗时较短的特征角度计算,速度没有提升。
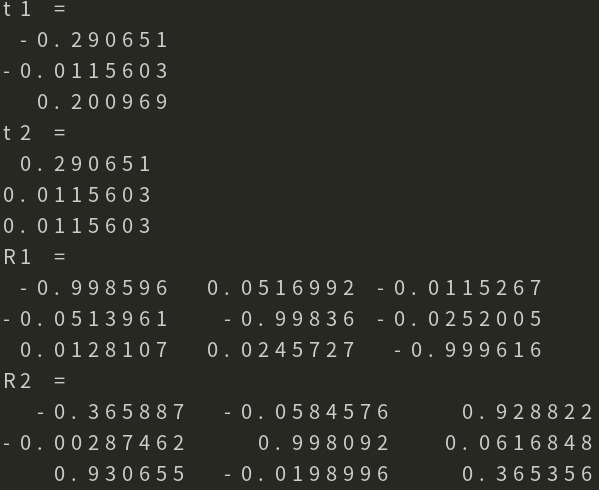
从E恢复R,t
程序思路
将矩阵进行SVD分解后,按照求解公式解出R1 R2 t1 t2,任意两个Rt组合即为一组可能的解。
核心代码
#include <Eigen/Core>
#include <Eigen/SVD>
#include <Eigen/Geometry>
#include <iostream>
int main()
{
Eigen::Matrix3d E;
E << -0.0203618550523477, -0.4007110038118445, -0.03324074249824097 \
, 0.3939270778216369, -0.03506401846698079, 0.5857110303721015 \
, -0.006788487241438284, -0.5815434272915686, -0.01438258684486258;
std::cout << "E = " << std::endl << E << std::endl;
//SVD
Eigen::JacobiSVD<Eigen::MatrixXd> svd(E, Eigen::ComputeThinU | Eigen::ComputeThinV);
Eigen::Matrix3d U = svd.matrixU();
Eigen::Matrix3d V = svd.matrixV();
Eigen::Matrix3d S = U.transpose()* E * V;
std::cout << "S = " << std::endl << S << std::endl;
//重新确定奇异值
float s1 = (S(1,1) + S(2,2))/2;
S << s1, 0, 0, 0, s1, 0, 0, 0, 0;
//计算R1 R2 t1 t2
Eigen::AngleAxisd rotZ(M_PI/2, Eigen::Vector3d(0, 0, 1));
Eigen::AngleAxisd rotZ_(-M_PI/2, Eigen::Vector3d(0, 0, 1));
Eigen::Matrix3d t1_M = U*rotZ.matrix()*S*U.transpose();
Eigen::Matrix3d t2_M = U*rotZ_.matrix()*S*U.transpose();
Eigen::Matrix3d R1_M = U*rotZ.matrix()*V.transpose();
Eigen::Matrix3d R2_M = U*rotZ_.matrix()*V.transpose();
Eigen::Vector3d t1(t1_M(2,1), - t1_M(2,0), t1_M(1,0));
Eigen::Vector3d t2(t2_M(2,1), - t2_M(2,0), t1_M(2,0));
std::cout << "t1 = " << std::endl << t1 << std::endl;
std::cout << "t2 = " << std::endl << t2 << std::endl;
std::cout << "R1 = " << std::endl << R1_M << std::endl;
std::cout << "R2 = " << std::endl << R2_M << std::endl;
}
运行结果
使用G-N实现BA中的位姿估计
问题1:读取三维点和二维投影点
程序思路
使用ifstream的>>运算符按行读取即可
核心代码
// load points in to p3d and p2d
// START YOUR CODE HERE
ifstream p2d_ifstream(p2d_file);
ifstream p3d_ifstream(p3d_file);
if(!p2d_ifstream.is_open() || !p3d_ifstream.is_open())
{
std::cout << "file open failed" << std::endl;
return 1;
}
while(!p2d_ifstream.eof() && !p3d_ifstream.eof())
{
Eigen::Vector3d p3dSample;
Eigen::Vector2d p2dSample;
p2d_ifstream >> p2dSample(0) >> p2dSample(1);
p3d_ifstream >> p3dSample(0) >> p3dSample(1) >> p3dSample(2);
p3d.push_back(p3dSample);
p2d.push_back(p2dSample);
}
// END YOUR CODE HERE
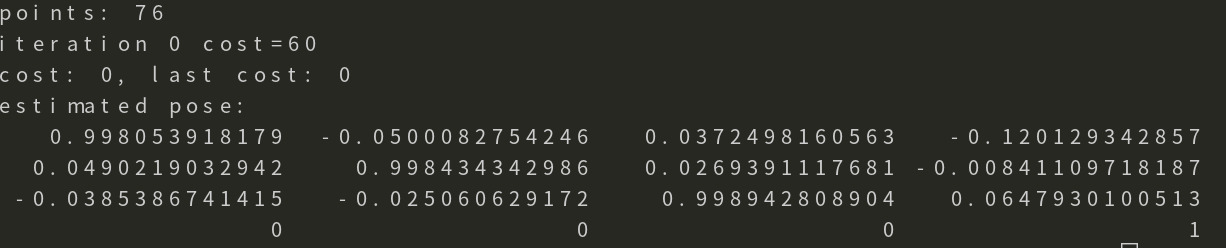
运行结果
成功读取76个样本点
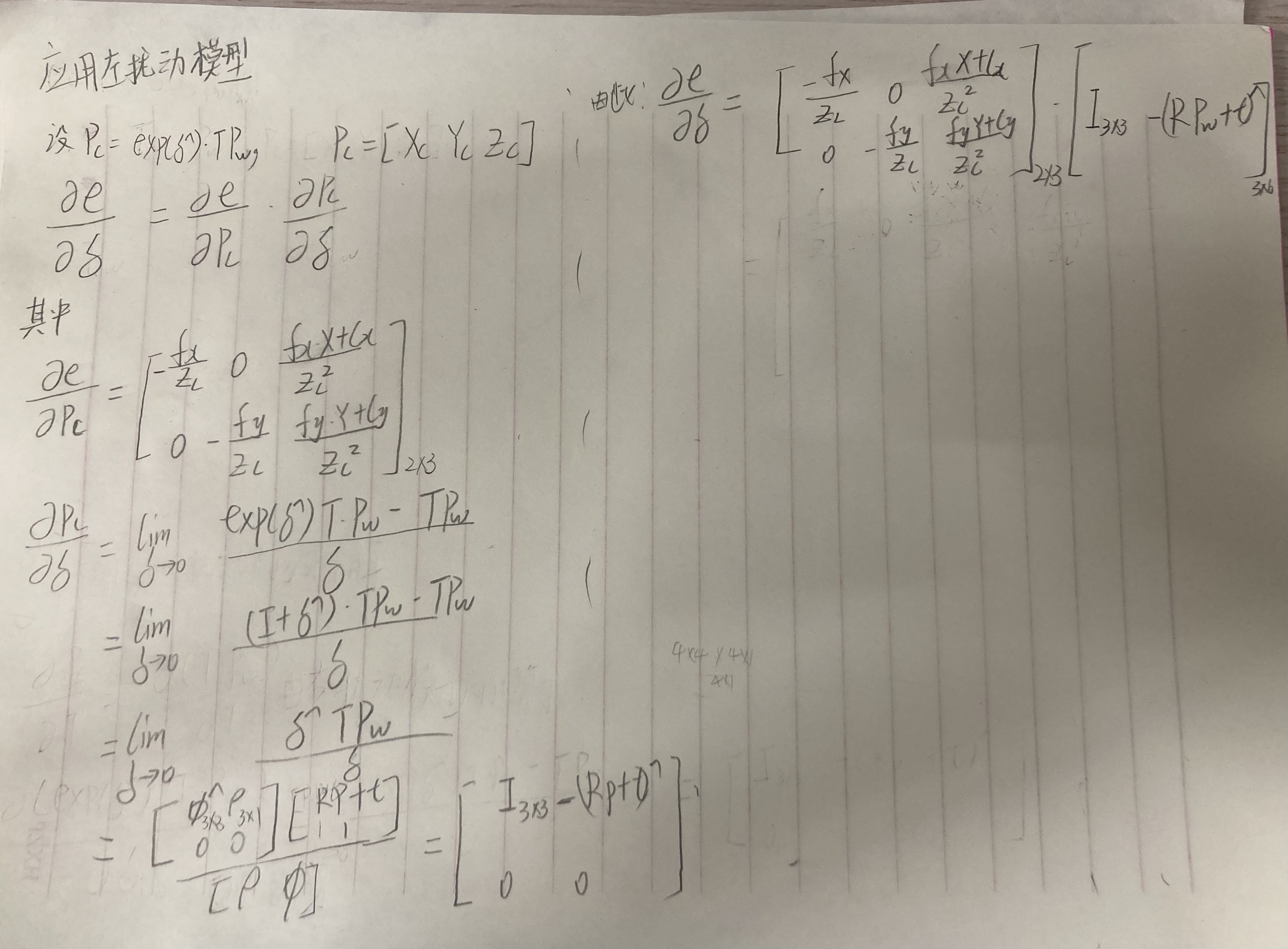
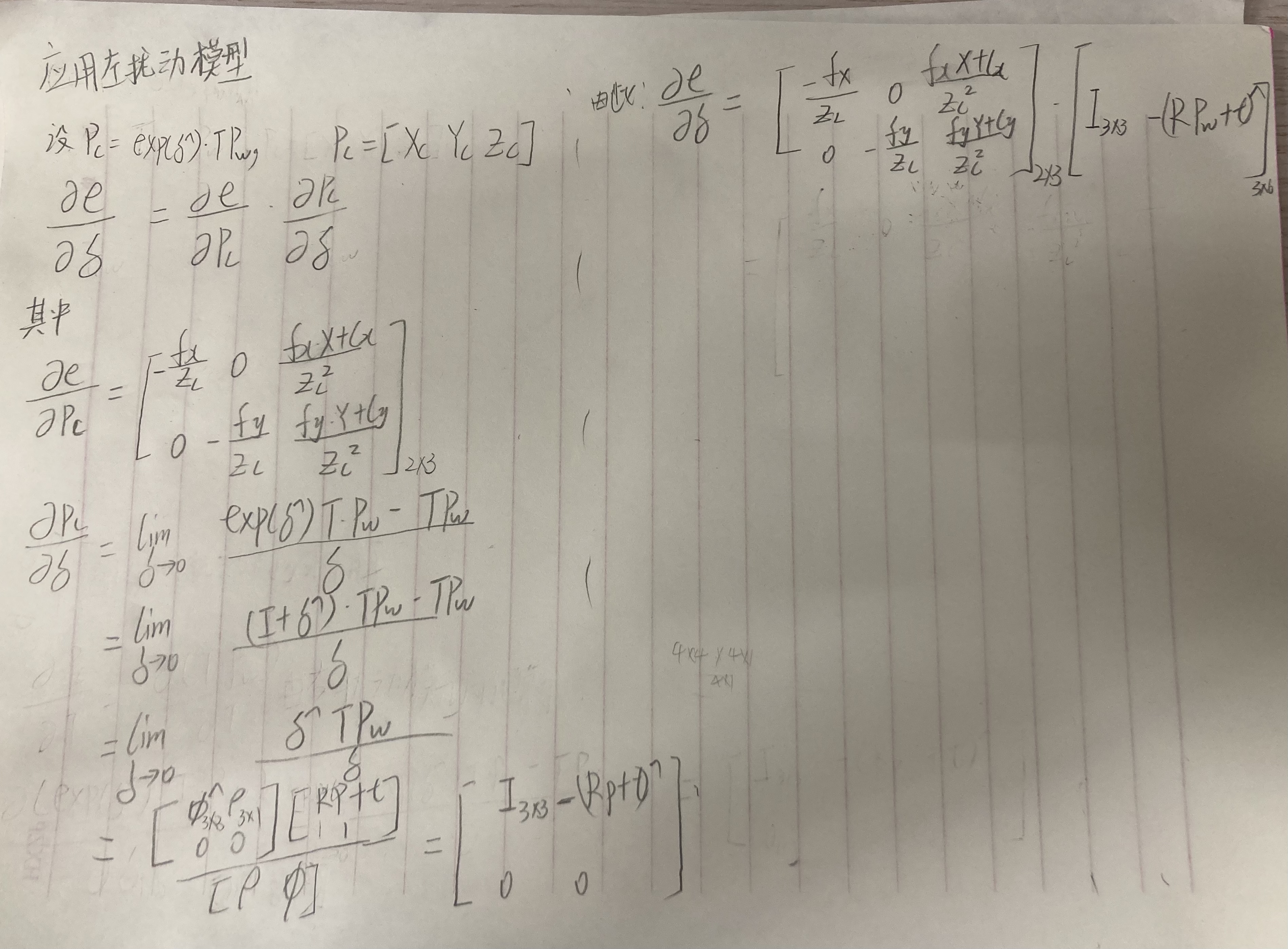
问题2:计算重投影误差及雅可比推导
数学推导
重投影误差: e = ∣ ∣ x − s K T c w P w ∣ ∣ e=||x-sKT_{cw}P_{w}|| e=∣∣x−sKTcwPw∣∣
对模型施加左扰动,并对这个扰动求导:
核心代码
for (int i = 0; i < nPoints; i++) {
// compute cost for p3d[I] and p2d[I]
// START YOUR CODE HERE
// 计算损失
Eigen::Vector2d e;
Eigen::Vector2d p2d_c = p2d[i];
Eigen::Vector3d p3d_w = p3d[i];
Eigen::Vector3d p3d_c = T_esti*p3d_w;
e(0) = p2d_c[0] - (fx*p3d_c[0]/p3d_c[2]+cx);
e(1) = p2d_c[1] - (fy*p3d_c[1]/p3d_c[2]+cy);
// END YOUR CODE HERE
// compute jacobian
Matrix<double, 2, 6> J;
// START YOUR CODE HERE
Eigen::Matrix<double, 2, 3> J_e2Pc;
Eigen::Matrix<double, 3, 6> J_Pc2Li;
//重投影误差到TP的偏导
J_e2Pc << -fx/p3d_c(2), 0, (fx*p3d_c(0))/(p3d_c(2)*p3d_c(2)), \
0, -fy/p3d_c(2), (fy*p3d_c(1))/(p3d_c(2)*p3d_c(2));
//TP到扰动李代数的偏导
J_Pc2Li.block(0,0,3,3) = Eigen::Matrix3d::Identity(3, 3);
J_Pc2Li.block(0,3,3,3) << 0, p3d_c(2), -p3d_c(1), -p3d_c(2), 0, p3d_c(0), p3d_c(1), -p3d_c(0), 0;
//std::cout << std::endl << "J_Pc2Li = " << J_Pc2Li << std::endl;
J = J_e2Pc*J_Pc2Li;
// END YOUR CODE HERE
H += J.transpose() * J;
b += -J.transpose() * e;
}
问题3:扰动求解及李群更新
程序思路
- 扰动求解:N-G中,由于H是半正定矩阵,因此可以采用choloesky分解的方法求解
- 李群更新:由于采用的是左扰动模型,因此更新方式为 T = e x p ( δ Λ ) T T = exp(\delta^{\Lambda})T T=exp(δΛ)T
核心代码
// START YOUR CODE HERE
dx = H.llt().solve(b);
// END YOUR CODE HERE
// update your estimation
// START YOUR CODE HERE
T_esti = Sophus::SE3d::exp(dx)*T_esti;
// END YOUR CODE HERE
运行结果
一些小问题
- 如何定义重投影误差?
重投影误差: e = ∣ ∣ x − s K T c w P w ∣ ∣ e=||x-sKT_{cw}P_{w}|| e=∣∣x−sKTcwPw∣∣
- 该误差关于自变量的雅可比矩阵是什么?
对模型施加左扰动,并对这个扰动求导:
- 解出更新量之后,如何更新至之前的估计上?
由于采用的是左扰动模型,因此更新方式为 T = e x p ( δ Λ ) T T = exp(\delta^{\Lambda})T T=exp(δΛ)T
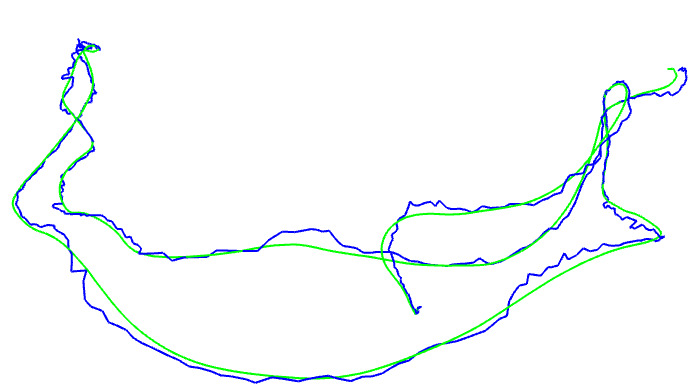
ICP实现轨迹对齐
程序思路
- 给每个坐标去除中心点
- SVD分解求R R = U V T R = UV^T R=UVT
- 求t t = p − R p ‘ t = p - Rp‘ t=p−Rp‘
源代码
#include <fstream>
#include <Eigen/Core>
#include <Eigen/SVD>
#include <sophus/se3.hpp>
#include <iostream>
#include <vector>
#include <pangolin/pangolin.h>
using namespace std;
void DrawTrajectory(vector<Eigen::Vector3d> points1, vector<Eigen::Vector3d> points2);
std::string filePath = "/home/sld/workspace/vslamLessonHomeWork/L5/project/data/compare.txt";
std::vector<Eigen::Vector3d> points1;
std::vector<Eigen::Vector3d> points2;
std::vector<Eigen::Vector3d> points1_;
std::vector<Eigen::Vector3d> points2_;
int main()
{
std::ifstream file(filePath);
if(!file.is_open())
return 1;
//数据读取
while(!file.eof())
{
double time1, q11, q12, q13, q14, time2, q21, q22, q23, q24;
Eigen::Vector3d p1;
Eigen::Vector3d p2;
file >> time1 >> p1[0] >> p1[1] >> p1[2] >> q11 >> q12 >> q13 >> q14 >> time2 >> p2[0] >> p2[1] >> p2[2] >> q21 >> q22 >> q23 >> q24;
points1.push_back(p1);
points2.push_back(p2);
}
//数据点取均值
Eigen::Vector3d p1Avg(0, 0, 0);
Eigen::Vector3d p2Avg(0, 0, 0);
for(int i = 0; i < points1.size(); i++)
{
p1Avg = p1Avg + points1[i];
p2Avg = p2Avg + points2[i];
}
p1Avg = p1Avg/points1.size();
p2Avg = p2Avg/points2.size();
for(int i = 0; i < points1.size(); i++)
{
points1_.push_back(points1[i] - p1Avg);
points2_.push_back(points2[i] - p2Avg);
}
//SVD分解求R
Eigen::Matrix3d W;
W << 0, 0, 0, 0, 0, 0, 0, 0, 0;
for(int i = 0; i < points1_.size(); i++)
{
W = W + points1_[i]*points2_[i].transpose();
}
Eigen::JacobiSVD<Eigen::MatrixXd> svd(W, Eigen::ComputeThinU | Eigen::ComputeThinV);
Eigen::Matrix3d U = svd.matrixU();
Eigen::Matrix3d V = svd.matrixV();
Eigen::Matrix3d S = U.transpose()* W * V;
Eigen::Matrix3d R = U*V.transpose();
//求t
Eigen::Vector3d t = p1Avg - R*p2Avg;
//坐标转换并显示
for(int i = 0; i < points2.size(); i++)
{
points2[i] = R*points2[i] + t;
}
DrawTrajectory(points1, points2);
}
运行结果


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









