






1.课题概述
基于PID-bang-bang控制算法的卫星姿态控制。仿真输出控制器的控制收敛曲线,卫星姿态调整过程的动画。
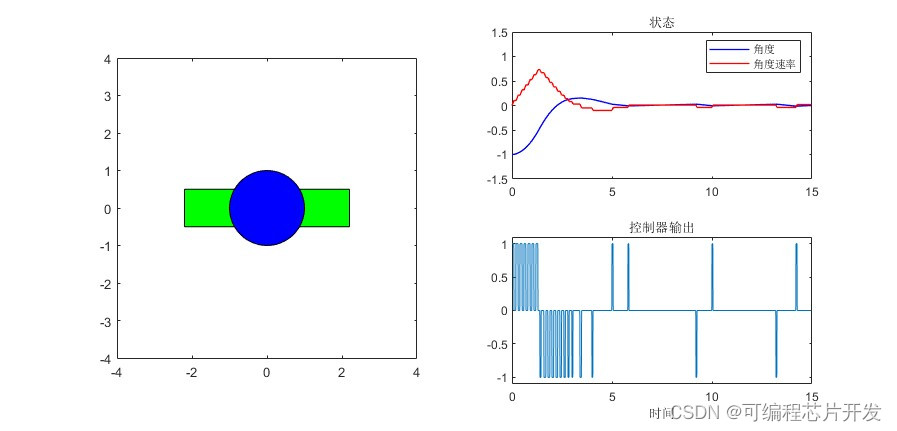
2.系统仿真结果
3.核心程序与模型
版本:MATLAB2022a
4.系统原理简介
PID(比例-积分-微分)控制器是一种广泛使用的控制算法,它通过计算误差信号的比例、积分和微分项来调整系统的输出,以减小误差并达到期望的控制目标。Bang-Bang控制则是一种简单的双模态控制策略,其中控制器输出在两个极值之间切换,通常用于实现快速响应。
PID控制器: 基于误差(e(t))进行工作,误差为期望姿态角(θ_d)与实际姿态角(θ)之差,即 e(t) = θ_d - θ。PID控制器输出(u(t))由以下三部分组成:
u(t) = K_p * e(t) + K_i * ∫e(t)dt + K_d * de(t)/dt
其中:
K_p是比例增益,它直接影响系统对当前误差的响应速度。
K_i是积分增益,用于消除稳态误差,防止误差累积。
K_d是微分增益,通过预测未来误差变化趋势,提高系统的动态性能和稳定性。
Bang-Bang控制: Bang-Bang控制是一种开关型控制策略,其输出要么是最大值U_max,要么是最小值U_min,取决于当前误差是否超出设定的阈值。在卫星姿态控制中,当卫星姿态偏差超出预定范围时,bang-bang控制器会立即输出最大或最小控制力矩,以尽快纠正姿态。
PID-bang-bang混合控制: 在实际应用中,PID控制可提供连续且平滑的控制输出,但可能在某些极端条件下反应不足;而bang-bang控制虽然反应迅速,但易导致系统震荡。因此,将两者结合,通常会在正常状态下采用PID控制,而在姿态偏差过大、需要快速响应时切换至bang-bang控制。

















 538
538

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









