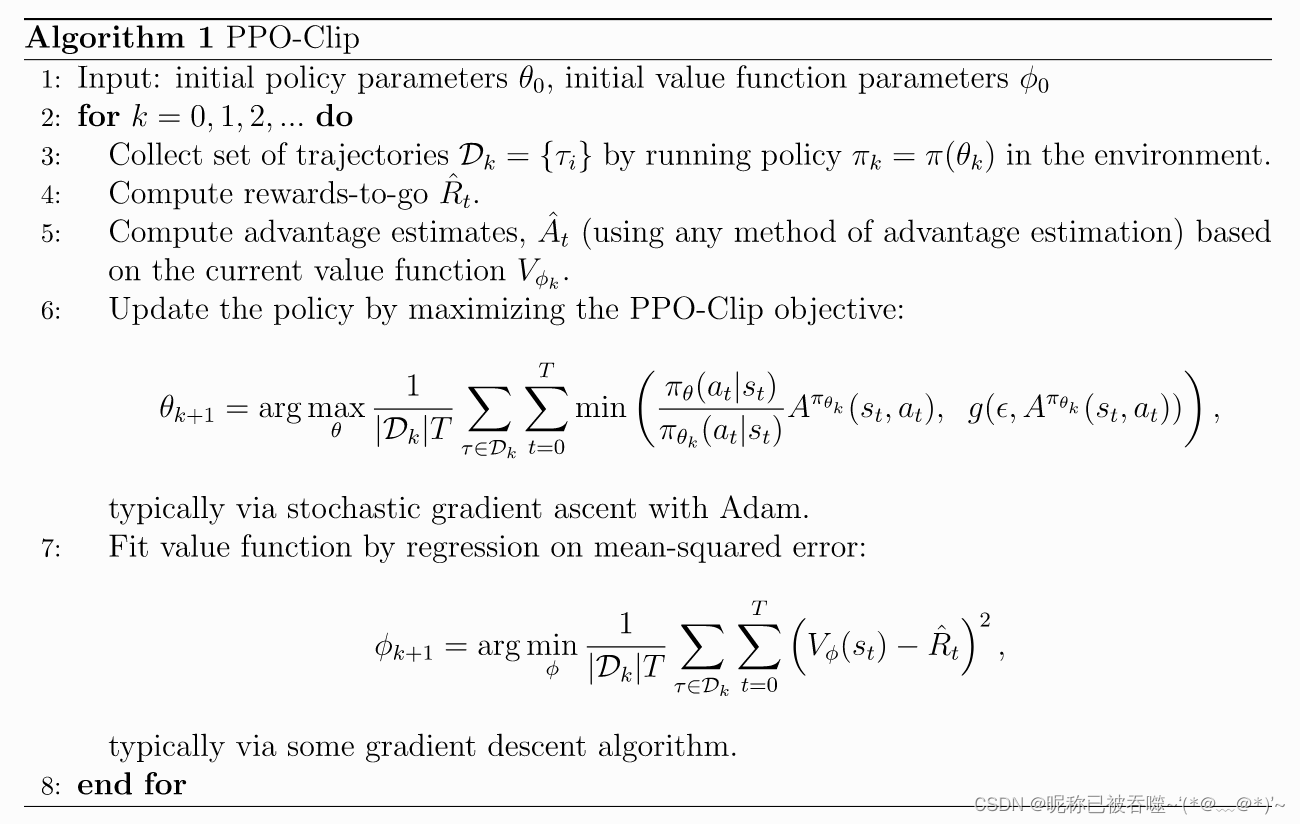
算法流程
代码
import tensorflow as tf
import numpy as np
import gym
import copy
physical_devices = tf.config.experimental.list_physical_devices('GPU')
tf.config.experimental.set_memory_growth(physical_devices[0], True)
def build_model(action_dim, l2=1e-4):
feature_input = tf.keras.Input(shape=(210, 160, 3))
x = tf.keras.layers.Conv2D(64, 7, 3, padding='same', use_bias=False,
kernel_regularizer=tf.keras.regularizers.l2(l2))(feature_input)
x = tf.keras.layers.BatchNormalization()(x)
x = tf.keras.layers.Activation('relu')(x)
x = tf.keras.layers.Conv2D(128, 7, 3, padding='same', use_bias=False,
kernel_regularizer=tf.keras.regularizers.l2(l2))(x)
x = tf.keras.layers.BatchNormalization()(x)
x = tf.keras.layers.Activation('relu')(x)
x = tf.keras.layers.Conv2D(256, 7, 3, padding='same', use_bias=False,
kernel_regularizer=tf.keras.regularizers.l2(l2))(x)
x = tf.keras.layers.BatchNormalization()(x)
x = tf.keras.layers.Activation('relu')(x)
x = tf.keras.layers.Conv2D(512, 5, 2, padding='same', use_bias=False,
kernel_regularizer=tf.keras.regularizers.l2(l2))(x)
x = tf.keras.layers.BatchNormalization()(x)
x = tf.keras.layers.Activation('relu')(x)
x = tf.keras.layers.Conv2D(1024, 5, 2, padding='same', use_bias=False,
kernel_regularizer=tf.keras.regularizers.l2(l2))(x)
x = tf.keras.layers.BatchNormalization()(x)
x = tf.keras.layers.Activation('relu')(x)
feature_output = tf.keras.layers.GlobalAvgPool2D()(x)
x_a = tf.keras.layers.Dense(units=512, activation='relu',
kernel_regularizer=tf.keras.regularizers.l2(l2))(feature_output)
x_a = tf.keras.layers.Dense(units=512, activation='relu',
kernel_regularizer=tf.keras.regularizers.l2(l2))(x_a)
actor_output = tf.keras.layers.Dense(units=action_dim, activation='softmax',
kernel_regularizer=tf.keras.regularizers.l2(l2))(x_a)
x_c = tf.keras.layers.Dense(units=512, activation='relu',
kernel_regularizer=tf.keras.regularizers.l2(l2))(feature_output)
x_c = tf.keras.layers.Dense(units=512, activation='relu',
kernel_regularizer=tf.keras.regularizers.l2(l2))(x_c)
critic_output = tf.keras.layers.Dense(units=1, activation='linear',
kernel_regularizer=tf.keras.regularizers.l2(l2))(x_c)
AC_model = tf.keras.Model(inputs=feature_input, outputs=[actor_output, critic_output])
AC_model.summary()
return AC_model
def choice_action(model, state):
policy, value = model(np.array([state], dtype=np.float))
policy = tf.stop_gradient(policy).numpy()
return np.random.choice(
len(policy[0]),
p=policy[0]
), policy[0]
def get_advantage(model, state, reward, batch_size):
policy, value = model.predict(state, batch_size=batch_size, verbose=0)
return reward - value
def get_value(model, state, batch_size):
policy, value = model.predict(state, batch_size=batch_size, verbose=0)
return value
def PPO_train(model, optimizer, batch_state, batch_action, batch_policy, advantage, batch_raward, K_epochs, batch_size,
epsilon=0.2, T=1e-2):
losses = 0.0
ent = 0.0
advantage = np.reshape(advantage, newshape=(-1))
batch_action = tf.stack([tf.range(tf.shape(batch_action)[0], dtype=tf.int32), batch_action], axis=1)
data_length = len(state)
mini_epo = int(data_length / batch_size) + 1
for _ in range(K_epochs):
for i in range(mini_epo):
start = i * batch_size
end = min((i + 1) * batch_size, data_length)
b_s = batch_state[start:end]
b_a = batch_action[start:end]
b_p = batch_policy[start:end]
adv = advantage[start:end]
b_r = batch_raward[start:end]
with tf.GradientTape() as tape:
new_policy, value_predict = model(b_s)
pi_prob = tf.gather_nd(params=new_policy, indices=b_a)
oldpi_prob = tf.gather_nd(params=b_p, indices=b_a)
entropy = - tf.reduce_sum(new_policy * tf.math.log(new_policy + 1e-6), axis=-1)
ratio = pi_prob / (oldpi_prob + 1e-6)
surr1 = ratio * adv
surr2 = tf.clip_by_value(ratio, clip_value_min=1.0 - epsilon, clip_value_max=1.0 + epsilon) * adv
loss = - tf.minimum(surr1, surr2) - T * entropy + tf.keras.losses.mean_squared_error(b_r, value_predict)
grad = tape.gradient(loss, model.trainable_variables)
optimizer.apply_gradients(zip(grad, model.trainable_variables))
losses += np.mean(loss.numpy())
ent += np.mean(entropy.numpy())
return losses / (K_epoch * mini_epo), ent / (K_epochs * mini_epo)
if __name__ == '__main__':
episodes = 1000000
env_name = "ALE/SpaceInvaders-v5"
render = False
full_action_space = False
training = True
if render:
env = gym.make(env_name, render_mode="human", full_action_space=full_action_space)
else:
env = gym.make(env_name, render_mode="rgb_array", full_action_space=full_action_space)
env.seed(0)
action_dim = env.action_space.n
learning_rate = 2.5 * 1e-4
batch_size = 256
model = build_model(action_dim=action_dim)
optimizer = tf.keras.optimizers.Adam(learning_rate=learning_rate)
try:
print("load models at ./{}".format(env_name))
model.load_weights("./{}.h5".format(env_name))
print("load model success!")
except:
print("No checkpoint, Init new model!")
print("Action Space dimension: {}".format(action_dim))
gamma = 0.99
lam = 0.95
assert lam >= 0.0 and lam <= 1.0, "lammbda必须介于[0, 1]"
K_epoch = 8
assert K_epoch > 1, "K_epoch必须大于1,不然计算的重要性采样没有意义"
epsilon = 0.2
assert epsilon > 0.0 and epsilon < 1.0, "epsilon必须介于(0, 1)"
temperature = 1e-2
if training:
for e in range(episodes):
state = env.reset()
S, A, P, R, nS = [], [], [], [], []
score = 0.0
while True:
action, policy = choice_action(model, state)
next_state, reward, done, info = env.step(action)
score += reward
S.append(state)
A.append(action)
P.append(policy)
R.append(reward)
nS.append(next_state)
state = copy.deepcopy(next_state)
if done:
discounted_r = []
tmp_r = 0.0
v_nS = get_value(model, np.array(nS, dtype=np.float), batch_size)
v_nS[-1] = 0
for r, vs in zip(R[::-1], v_nS[::-1]):
tmp_r = r + gamma * (lam * tmp_r + (1.0 - lam) * vs[0])
discounted_r.append(np.array([tmp_r]))
discounted_r.reverse()
bs = np.array(S, dtype=np.float)
ba = np.array(A)
bp = np.array(P)
br = np.array(discounted_r, dtype=np.float)
advantage = get_advantage(model, bs, br, batch_size)
advantage = (advantage - advantage.mean()) / (advantage.std() + 1e-6)
losses, entropy = PPO_train(
model=model,
optimizer=optimizer,
batch_state=bs,
batch_action=ba,
batch_policy=bp,
advantage=advantage,
batch_raward=br,
K_epochs=K_epoch,
batch_size=batch_size,
epsilon=epsilon,
T=temperature
)
print("episode: {}/{}, score: {}, losses: {:.4f}, entropy: {:.4f}".format(
e + 1, episodes, score, losses, entropy))
break
if (e + 1) % 50 == 0:
model.save_weights("./{}.h5".format(env_name))
print("Model Saved!")
else:
env = gym.make(env_name, render_mode="human", full_action_space=full_action_space)
env.seed(0)
state = env.reset()
while True:
action, _ = choice_action(model, state)
next_state, reward, done, info = env.step(action)
state = copy.deepcopy(next_state)
if done: break


























 2837
2837

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









