







首先简要概括一下地平线RDK X5 它是千元以内最好用的智能套件吗,性价比极高,没有之一,我购买的在这款8g的rdk x5到手价649-50 ,非常的划算。同时他的性能也十分得亮眼。这里直接上图
如果说简单的参数并不能显示他强悍的性能,那我就简单的展示一下他的示例
1.首先测试一下本机自带的demo 斑马识别算法 。
cd到这个路径下
cd /app/pydev_demo/01_basic_sample/

他的运行结果

是不是很神奇,对于机器人小白来说这么简单就实现了基于深度学习的斑马识别了呢,当然有的人会说,啊呀,你这个是不是之前就弄好的,就是一个为了结果而显示的过程呢。那我们就实战一下吧
RDK X5 不仅有强悍的性能,更重要的是有良好的生态环境,这里就简单介绍一下 rdk studio ,它是地平线基于自家BPU专门设计优化的一套软件框架。能快速的上手识别简单的,你需要的深度学习识别的相关内容。
现在我们就快速的进入主题。
首先我们要连接到rdk studio 他的连接方式有三种
1.基于type c闪连
2.基于网线连接
3.基于无线网连接
我这里使用的是wifi连接,默认的ip:192.1638.0.124
官网下的 rdk studio win10下安装这个软件可能会报错,但是没啥大问题可以正常使用
这里可以看到官方大大贴出了很多年历程

这里我最感兴趣的是 视觉识别 。因为我的智能移动机器人,需要用到视觉识别
这里我们敲击
ls /dev/video*

因为这里我临时使用的是奥比中光的astra pro 这是一个廉价的双目深度摄像头 。当时咸鱼好像花了160吧 ,是双目红外结构光里最便宜的

这就是我帅气的脸庞,年级大了,头发都没多少了。
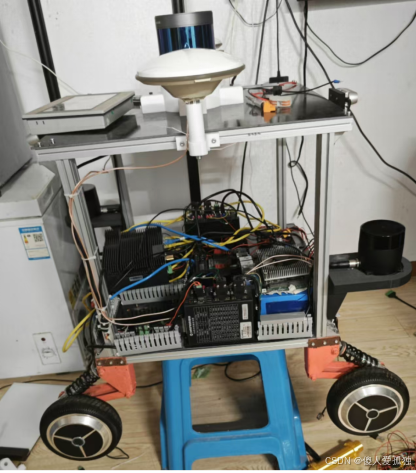
然后我就开始了我的智能底盘项目的diy了,这里首先简要阐述一下我的计划,随着时代的快速发展,智能机器人进入了家家户户,但是大公司的机器人底盘互不相同,那我能不能设计一款通用的地盘来适配不同家的激光雷达和摄像头呢。
硬件配置
1.和利时 一拖二伺服轮毂电机 *2
2.UB482 *2
3.D435 *2
4.CH110*1
5.镭射智能n301 *2
6.robosense 16线 *1
7.pgv100si *1
8.威纶通触摸屏 *1
9.ibus转ttl *1
10.科大讯飞语音阵列*1
11.5轴机械臂(后续可能会更换根据小米电机或者伺泰威的电机做diy3轴电机)
12.RDK X5 *1
我的小车diy的优势
优势1.四轮轮毂电机差速底盘结构紧凑,能够提供更好的空间利用率,同时由于电机直接驱动每个轮子,可以实现精确的轮速控制,从而达到更佳的车辆操控性能。此外,这种设计有助于提高车辆的牵引力和制动效率,因为每个轮子都可以独立控制,从而在复杂路况下提供更好的稳定性和适应性。轮毂电机差速底盘还简化了传动系统,减少了机械损耗,提高了能效。
优势2.采用超核电子ch110它能够提供高精度的角速度和角位移测量,这对于机器人在复杂环境中的稳定性和精确控制至关重要。其次,高精度陀螺仪能够帮助机器人进行准确的导航和定位,即使在GPS信号不可用的室内或地下环境中也能保持良好的定位性能。在配合扩展的ub482可以实现惯性导航,此外,高精度陀螺仪的快速响应时间使得机器人能够迅速调整姿态,应对各种突发情况,提高其动态性能和安全性。同时良好的抗干扰能力,能够确保机器人在电磁干扰等恶劣条件下依然能够稳定运行。
优势3:可以实现多传感器数据融合的组合导航,它结合了激光雷达、双目深度和GNSS传感器的优点,以提供精确和可靠的定位数据。激光雷达能够生成详细的三维环境地图,双目视觉系统则通过立体成像增强对物体距离和形状的感知。与此同时,GNSS系统配合基站能够实现厘米级定位。
优势3. RDKX5配合采用科大讯飞圆形语音阵列 ,可以实现智能语音移动机器人。定位精准可玩性极强
优势4. 高精度陀螺仪能配合PGV100SI 进行惯性二维码导航
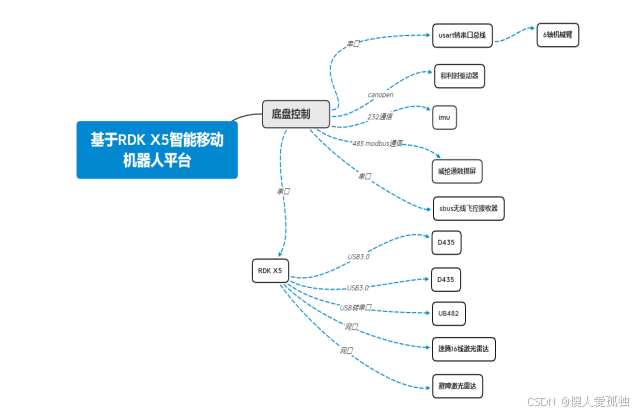
硬件框图
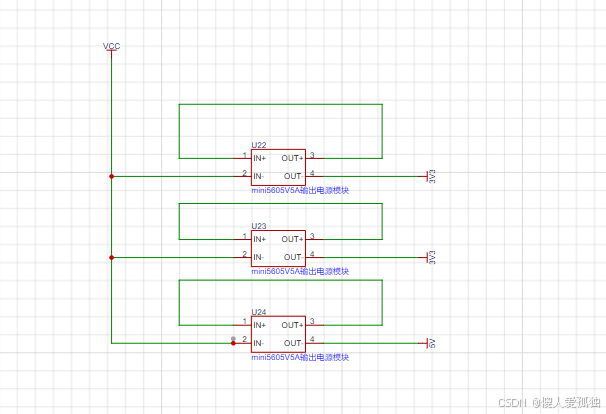
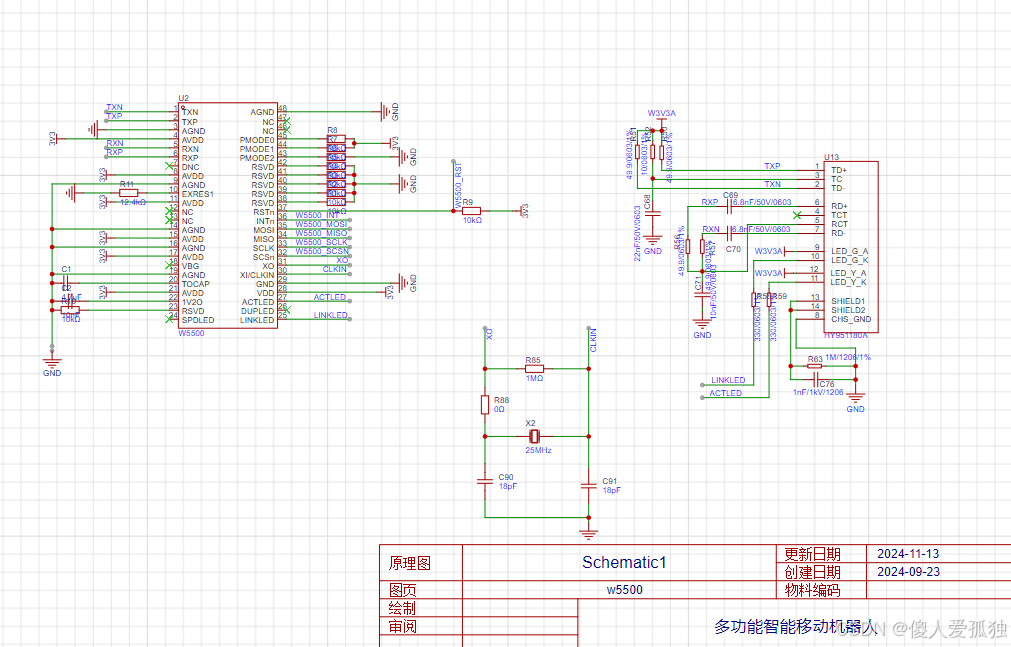
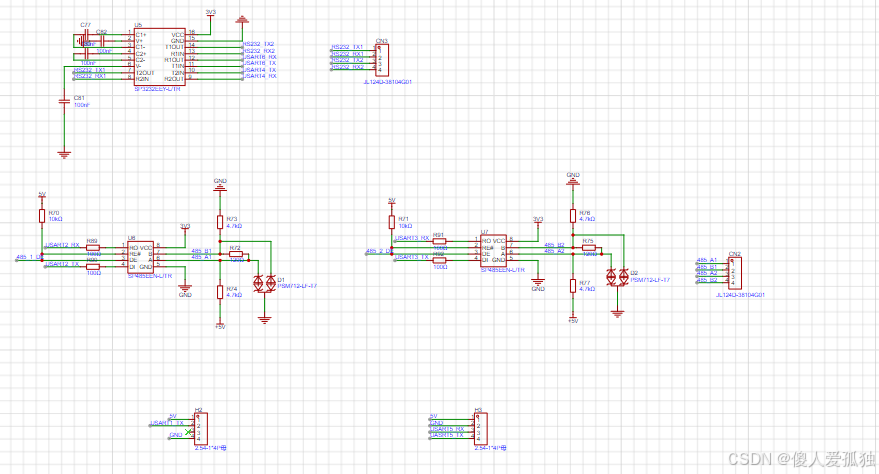
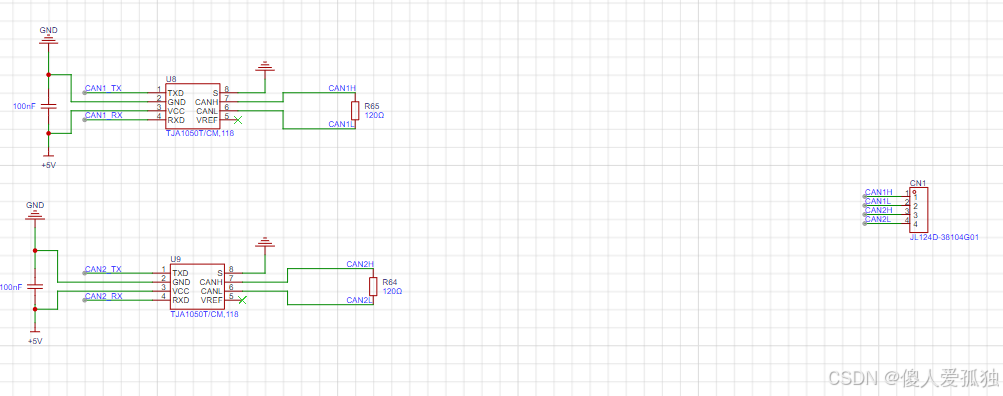
通用底盘控制模块原理图设计
现在只是在绘画阶段,有点菜,打样了,会在嘉立创开源出来,为了少花钱,还买了一个小型的回流焊炉,偷偷的心疼一下我的钱包

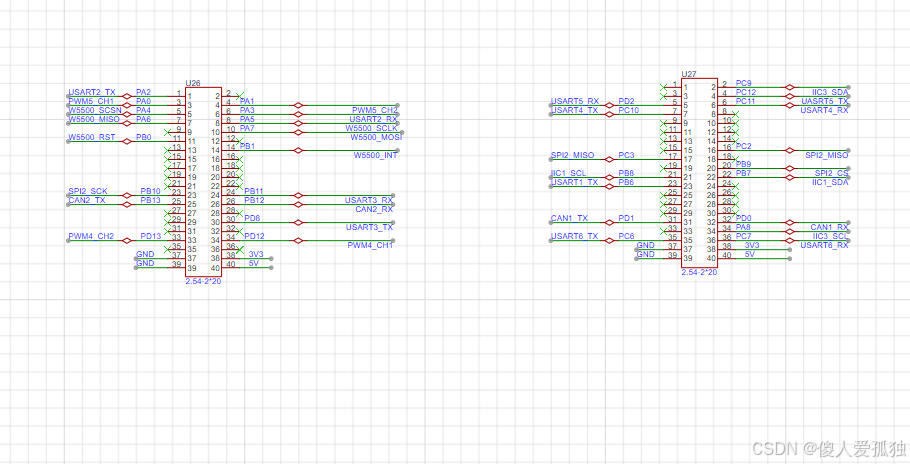
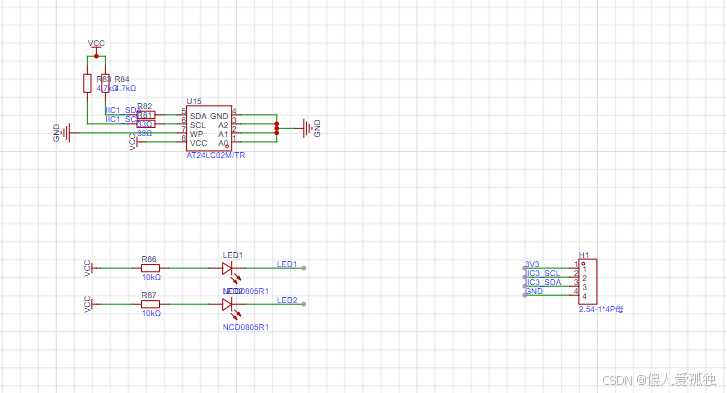
详细打样情况敬请期待
后续需要RDK x5实现的功能
首先是论坛中的demo 测试
先实现已经有的demo
1.cartographer
项目历程链接
https://developer.d-robotics.cc/nodehubdetail/170117036053371409
demo实际测试文档:
2.多线雷达的识别检测
项目历程
https://developer.d-robotics.cc/nodehubdetail/171723555685589506
demo实际测试文档:
3.视觉识别
项目历程
https://developer.d-robotics.cc/nodehubdetail/168958376283445760
demo实际测试文档:
项目历程
https://developer.d-robotics.cc/nodehubdetail/171723555685589514
demo实际测试文档:
1.基于RDK X5 的PGV100si 数据接收解析
PGV100si介绍:

3.
5.基于RDK X5 的ub482 数据接收解析
6.基于RDK X5 的和利时驱动器控制
7…基于RDK X5 的底层数据解析数据接收解析
#include <cstdio>
#include <iostream>
#include <fstream>
#include <string>
#include <termios.h>
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 535
535

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









