







1、针对VCU功能,应至少满足如下测试需求:
系统上下电测试;
能量管理功能测试;
扭矩分配功能测试;
手动驾驶模拟功能测试;
自定义驾驶循环工况测试;
与其他 ECU 的协控功能测试;
系统诊断功能测试;
系统通讯功能测试;
控制策略开发验证。
针对发动机相关功能,应至少满足如下测试需求:
发动机控制的氧传感器、节气门传感器等信号的模拟;
发动机启停过程的模拟与验证;
发动机扭矩输出与控制测试;
发动机模式与纯电模式的切换测试;
变速箱相关模拟与测试;
故障诊断功能。
2、VCU功能
VCU是核心控制部件,
根据加速踏板位置、档位、制动踏板力等驾驶员的操作意图和蓄电池的荷电状态计算出运行所需要的电机输出转矩等参数
协调各个动力部件的运动,保障电动汽车的正常行驶
通过行车充电和制动能量的回收等实现较高的能量效率
在完成能量和动力控制部分控制的同时,VCU还可以与智能化的车身系统一起控制车上的用电设备,以保证驾驶的及时性和安全性
VCU的设计直接影响着汽车的动力性、经济性、可靠性和其他性能
3、VCU的结构
其主要包含电源电路、开关量输入/输出模块、模拟量输入模块及CAN通讯模块。
1)电源模块从车载12V蓄电池取电,开关量输入模块接收的信号主要有钥匙信号、挡位信号、制动开关信号等;
2)开关量输出信号主要是控制继电器,其在不同整车系统中意义略有不同,一般情况下控制如水泵继电器及PTC继电器等;
3)模拟量输入模块采集加速踏板和制动踏板开度信号及蓄电池电压信号等;
4)CAN模块负责与整车其他设备通信,主要设备有电机控制器(MCU)、电池管理系统(BMS)及充电机等。
4、整车工作模式控制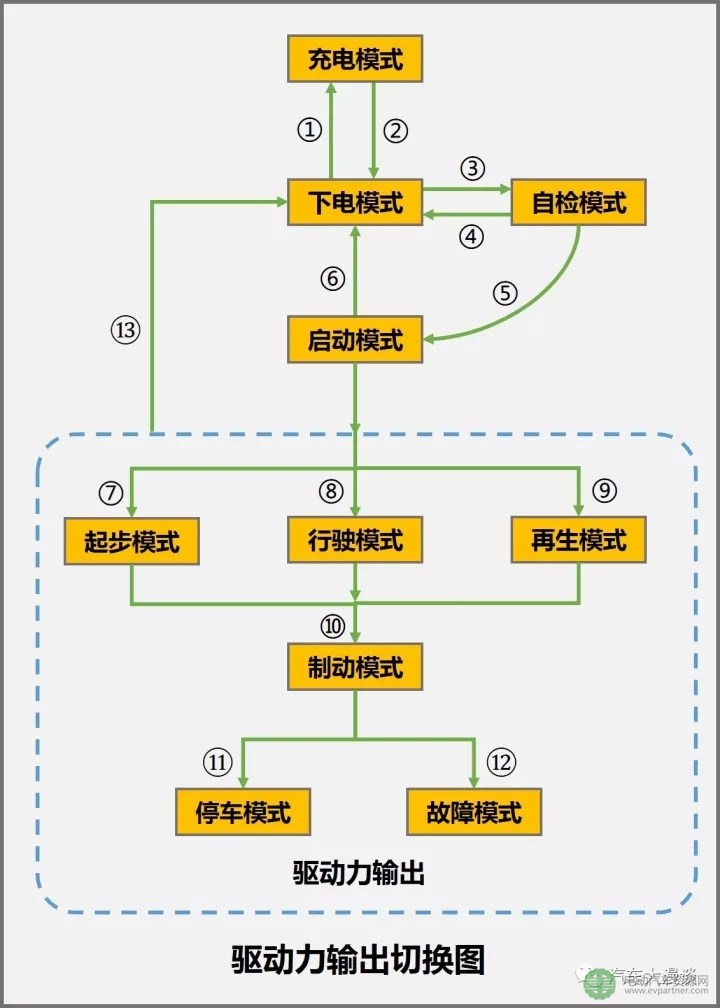
1)自检模式-如果钥匙门信号处于ON档,则启动自检模式,闭合主继电器,同时VCU进行自检,如果自检失败进入故障处理模式,自检通过等待启动信号。
2)启动模式——驾驶员通过打开钥匙等操作,使VCU上电,然后唤醒CAN网络上其他节点开始工作。当整车所有设备都正常启动后,系统进入READY状态,指示可以进行正常驾驶操作。如果钥匙门信号处于START挡,同时自检模式有效,挡位在P挡,没有禁止启动故障则进行高压上电程序,同时VCU给电机系统、DC-DC及空调控制系统发送高压上电请求命令,电机系统、DC-DC及空调控制系统检测没有高压故障则反馈给VCU准许上高压指令,VCU通过控制高压预充电及主继电器实现高压上电过程,高压上电结束后仪表上EV-Ready灯亮,完成启动模式。
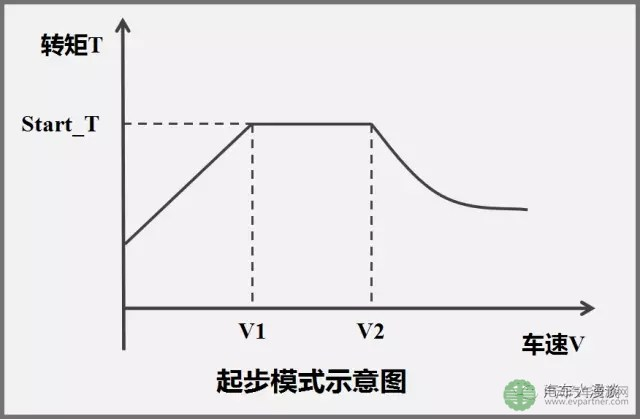
3)起步模式——如下图所示,当车辆由静止不踩加速踏板起步限车时,期望电机转矩以某可标定的汽车转矩Start-T为目标值,当车速V<V1时以某个斜率上升,以克服车辆的静止摩擦阻力;当车速V>V2时采用通过控制电机功率,将车速控制在一个合理的速度范围内,输出的电机扭矩进行一个滤波环节进行平滑处理,实现平稳的电起步。
4)行驶模式——行驶模式主要根据加速踏板位置及车辆行驶状态,实时控制电机扭矩指令,实现按驾驶员意图控制车辆运行。行驶控制过程中的控制方式分为恒转扭矩控制和恒功率控制
5)制动模式——相比传统燃油车,电动汽车的制动过程可以实现能量回收。当电动汽车处于制动状态时,VCU通过状态数据采集,推算所需的制动扭矩。此时驱动电机从工作模式转换为发电机模式向动力电池组充电。
6)再生模式——再生模式实现特定工况下控制电机发给电池充电,根据制动踏板状态分为滑行再生发电及制动再生两种情况
7)停车模式——停车模式是整车运行过程中无故障出现,驾驶者正常关闭钥匙,此模式中VCU控制电机和电池系统下电,然后控制各个附件设备关闭,完成自下电过程。
8)故障模式——整车故障一般分为2级(1级故障和2级故障)。故障来自于VCU,BMS,空调等终端设备或者加速踏板器等输入传感设备。这里定义1级故障为严重故障,2级故障为一般故障。整车系统出现2级故障时,汽车进入跛行故障模式,主要以限制系统输出功率的方式实现。整车系统出现1级故障时,整车系统进入紧急停止工作状态。
9)充电模式——充电时,插上充电枪,充电机开始工作,VCU被触发上电。在检测到充电连接信号后,VCU监控整车当前状态允许充电时启动BMS,然后BMS与充电机进行通信,启动充电过程,VCU持续监测BMS及充电机的状态信息,如果充电则仪表控制器显示充电灯充电状态。充电过程出现故障时VCU会及时切断BMS继电器,以中断充电过程,防止发生危险事故。
10)下电模式——如果钥匙门信号在OFF挡,则启动下电模式,VCU根据电机、空调等高压系统的准许下高压信号来控制BMS系统断开高压继电器,同时VCU根据电机系统的温度来确认是否要延时下电,温度降到一定范围内时,关闭电机冷却水泵和冷却风扇,关闭电源主继电器,下电完成
5、整车驱动控制
纯电动车的整车驱动系统由电机和电机控制系统组成,并通过CAN总线方式与整车网络通信。
1)VCU通过采集到的踏板开度信号和挡位等信号,经过转矩计算,得出最后的扭矩信息。扭矩信息通过CAN总线由VCU发送到MCU,MCU收到相应的控制信号后,执行对应的动作。
2)根据汽车的运行状况,电机运转模式分为电动模式和发电模式。电动模式下整车运行在驱动状态,汽车属于行驶状态;发电模式下整车运行在滑行或制动状态,实现制动能量的回馈。
3)电机控制系统在运行状态下,MCU实时向VCU上报状态信息和故障信息,并在系统出现故障时做出及时处理。VCU接收到MCU的各项信息后,会根据信息的内容对整车系统做出合理的控制。
6、整车能量优化管理
纯电动汽车整车能量的唯一来源为动力电池组,通过BMS有序管理。VCU通过总线与BMS通信。
1)BMS能够向VCU上报剩余电量信息、电池箱总电压和总电流、电池系统温度信息、电池输出继电器状态等。
2)VCU根据汽车控制策略以及来自总线上的电池状态和电机状态信息以闭合或者断开BMS的总正/负继电器,完成高压回路的闭合和断开功能。
3)与传统燃油车相比,电动汽车能够实现制动能量回馈功能。当整车处于减速滑行或制动状态时,VCU控制汽车产生再生制动力矩,使电机发电,并将电机发出的电能回充到动力电池中,以实现有效的制动能量回收
7、监测和管理其他部件——在纯电动汽车上除了动力系统相关的主要零部件外,还有加热PTC、电动空调(AC)、电动真空泵等诸多用电器,VCU需要采集和监控这些用电器的信号状态,结合整车状态判断是否允许这些用电器正常以及处于什么状态。
8、整车故障检测——VCU的故障主要分为传感器(加速踏板传感器)故障、继电器(空调继电器等)故障以及CAN总线故障。传感器故障可从硬件和软件两方面来检测处理。CAN总线故障主要有总线节点脱离和负载过高等。依据故障的严重程度,将故障分为2个等级,即2种故障模式。发生某种故障,就整车运行进入相应故障模式。
9、VCU设计思路——为了实现VCU的主要功能,必须通过VCU的硬件和软件两个方面来实现。软件控制策略是实现预期功能的关键,必须依靠硬件来实现相关功能,但硬件有其固有的缺陷:一旦硬件系统设计成型后,不易于修改;软件程序可以上万次地输入单片机,有利于系统的升级。事实上,在正确配置硬件的基础上,合理应用已有的硬件,可大大减少软件工作量;同时,完善软件也可填补硬件的不足,给研发、维护和检修带来很大方便,所以软件是核心,硬件是基础,缺一不可按照系统的功能以及工况情况分析————设计思路如下:
1)至少2路以上的CAN总线,建议3路。
2)可靠工作时间长度保证大于车辆使用周期。
3)鉴于设备需要极高的可靠性,所以要求双系统独立并协同工作,在出现一个系统故障时,另一个系统能够保证整车系统工作。
4)能够开放给驾驶员选择电机、储能系统、外接充能设备的各类工况选择。
5)拥有外接诊断接口,可以通过外接设备进行在线诊断。
6)多路信号采集和多路功率控制输出。
10、VCU开发——VCU开发主要采用“V”模式,所有控制策略与仿真模型都是利用框图化的基本模块建立起来的,主要包括控制方案的设计、离线仿真、快速控制原型、产品自动代码生成及集成、硬件在环仿真测试和标定(台架及道路实车测试标定)
(1)离线仿真阶段
1)建立对象数学模型。
2)设计控制方案。
3)以Matlab或者RTC为平台建立模型并进行仿真分析、测试。
(2)快速控制原型阶段
1)保留需要下载到dSPACE或者Motoron等快速原型的模块中。
2)用硬件接口关系代替原来的逻辑连接。
3)对I/O进行配置。
(3)自动代码生成及集成阶段
1)利用Matlab自带的RTW或者商业的Target Link工具将整车控制策略模型自动生成C代码。
2)利用code warrir或者GNU等软件集成工具,将控制策略生成的C代码应与VCU硬件底层程序集成。
3)通过bootloader自动下载到VCU硬件系统中。
(4)硬件在环——硬件在环(Hardware-in-loop,HIL)即指由硬件控制器与模拟器之间形成一个以数据、信号进行交流的闭环测试系统。通过虚拟的整车驾驶环境、道路环境的建立,与实际的控制器硬件之间建立循环系统,测试该控制器在虚拟环境下的各种功能
(5)标定——基于CAN总线的标定协议CAN Calibration Protocol,(CCP)是一个连接开发工具和VCU的软件接口协议,该协议定义了模块标定、数据采集和存取flash中运行数据的方法,在整车控制策略中,可以利用CCP实现以下功能:
①实时在线测试;
②各传感器检测和标定;
③报警或出错值的调整;
④程序下载
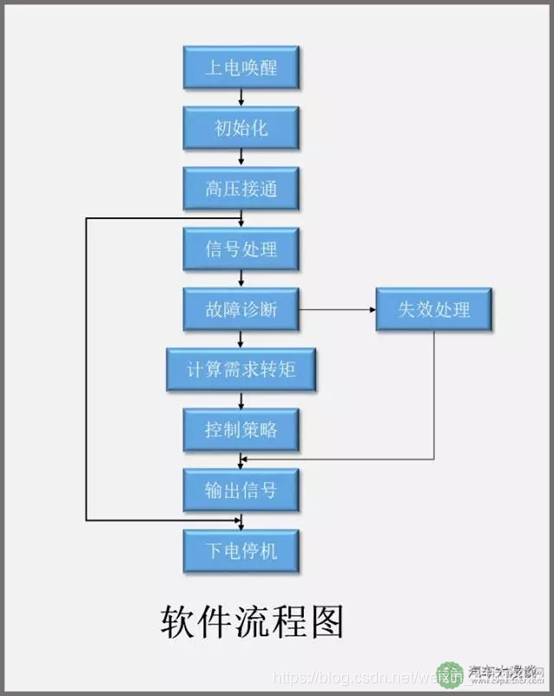
11、VCU设计流程
VCU软件由上层控制策略和底层驱动程序组成,用C语言编写。上层控制策略主要负责根据车辆状态和驾驶员意图实时控制能量流向和分配比例;下层软件主要负责单片机初始化设置、CAN总线信号的实时收发和其他输入、输出信号的实时处理与诊断。底层与上层的接口通过若干变量来实现。
12、硬件系统
需根据整车的底盘、车身相关部件的数量和控制内容计算,要求VCU的硬件必须满足以下接口数量、种类和驱动能力:
1)10路高有效和10路低有效开关量采集。可以对车身上开关情况进行采集,VCU根据具体的开关量状态进行判断或作相应的处理。
2)3路高速CAN(CAN2.0B)。电动汽车网络总线通讯协议主要参考SAEJ1939来制定,也就是在J1939的基础上制定出满足各种电动车辆控制需要的通讯协议。VCU与外界的联系就是通过CAN网络来实现,包括数据的收集、传递。
3)8路AD采集(其中定义4路为电压采集,4路为电阻采集)。电压为0—30V采集范围,电阻为0—10kΩ。可以对踏板信号、制动信号等模拟信号进行采集,采集数据经过相应处理,并按照具体协议发送给外部设备。
4)10路功率输出(最大2A输出)。每路功率最大可输出2A左右电流,共10路,可带40W的负载。在使用过程中,应避免满负荷工作。
5)2路+5V电源输出。+5V电源输出(ImAx=0.5A),可供给踏板或其他设备。
6)1路K-LINE。通过K线可以对VCU进行诊断和标定,也可对单个设备进行数据查询。
7)支持双电源、双系统工作(推荐采用)。采用主从控制方式,正常情况下,由主机来处理整车的信息。当遇到主机无法工作(出严重故障,发送故障指令)时,从机马上作出响应接替主机工作,使整个系统能正常运行。

















 202
202

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









