






这一篇学习笔记可能会包含以下内容:参考 https://zhuanlan.zhihu.com/p/531271576
- 第一周:深度学习的实践层面
- 训练集/开发集/测试集的划分
- 偏差与方差
- 机器学习的基础改进流程
- 正则化
- 输入归一化
- 梯度问题与带权初始化
- 梯度检查
- 第二周:优化算法
- 分批梯度下降
- 更高级的梯度下降算法
- 学习率衰减
- 第三周:调整超参数、批归一化和编程框架
- 调参策略
- 批归一化
- 多分类问题
- 深度学习框架 TensorFlow
优化神经网络
一. 训练集/开发集/测试集的划分
在使用机器学习的数据集时,我们一般把数据集分成三份:训练集、开发集、测试集。
机器学习是比深度学习的父集,表示一个更大的人工智能算法的集合。
开发集(Development Set) 另一种常见的称呼是验证集(Validation Set),即保留交叉验证(Hold-out Cross Validation)。
1.1 三种数据集的定义
它们三者的区别如下:
| 训练集 | 开发集 | 测试集 | |
|---|---|---|---|
| 用于优化参数 | 是 | 否 | 否 |
| 训练时可见? | 是 | 是 | 否 |
| 最终测试时可见? | 是 | 是 | 是 |
训练集就是令模型去拟合的数据。对于神经网络来说,我们把某类数据集输入进网络,之后用反向传播来优化网络的参数。这个过程中用的数据集就是训练营。
开发集是我们在训练时调整超参数时用到的数据集。我们会测试不同的超参数,看看模型在开发集上的性能,并选择令模型开发集上最优的一组超参数。
测试集是我们最终用来评估模型的数据集,当模型在测试集上评测时,我们的模型已经不允许修改了。我们一般把模型在测试集上的测评结果作为模型的性能评估标准。
在我们之前实现的小猫分类项目中,准确来说,我们使用的不叫测试集,而叫做开发集,因为我们是根据那个"testing set"优化网络超参数的。
有人把训练集比作上课,开发集比作作业,测试集比作考试。如果你理解了这三个数据集的原理,会发现这个比喻还是挺贴切的。事实上,由于测试集不参与训练,一个机器学习项目可以没有测试集,就像我们哪怕不经过考试,也可以学到知识一样。
1.2通过划分数据得到训练/测试集
在前一个机器学习纪元,人们通常会拿到一批数据,按7:3的比例划分训练集/测试集(对于没有超参数要调的模型),或者按6:2:2的比例划分训练集/开发集/测试集。
而在深度学习时代,数据量大大增加。实际上,开发集和测试集的目的都是评估模型,而评估模型所需的数据没有训练需要得那么多。所以,当整体的数据规模达到百万级,甚至更多时,我们只需要各取10000组数据作为开发集和测试集即可。
1.3收集来自不同分布的数据集
除了从同一批数据中划分出不同的数据集,还有另一种得到训练集、测试集的方式——从不同分布中收集数据集。
分布是统计学里的概念,这里可以理解成不同来源,内容的“平均值”差别很大的数据。
比如,假如我们要为某个小猫分类器收集小猫的图片,我们的训练图片可以是来自互联网,而开发和验证的数据来自用户用收集拍摄的图片。
注意,由于开发集和验证集都是用来评估的,它们应该来自同一个分布。
1.4偏差与方差
机器学习中,我们的模型会出现高偏差或/和高误差的问题。我们需要设法判断我们的模型是否有这些问题。
偏差(bias)与方差(variance)是统计学里的概念,前者表示一组数据离期待的平均值的差距,后者表示数据的离散程度。
试想一个射击运动员在打靶。偏差与打靶的总分数有关,因为总分越高,意味着每次射击都很靠近靶心;方差与选手的发挥稳定性有关,比如一个不稳定的选手可能一次9环,一次6环。
高偏差意味着模型总是不能得到很好的结果,高方差意味着模型不能很好地在所有数据集上取得好的结果(即只能在某些特定数据集上表现较好,在其他数据集上都表现较差)
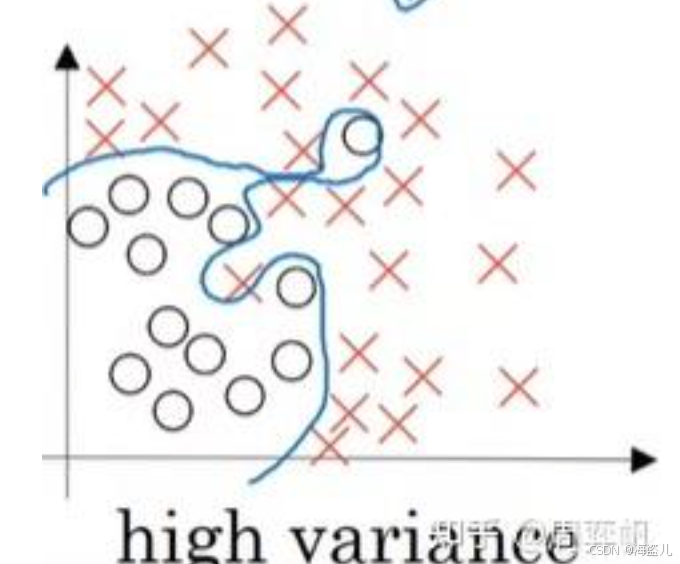
我们把高偏差的情况叫做“欠拟合”(可能模型还没有训练完,所以表现不够好),把高方差的情况叫做“过拟合”(模型在训练集上训练过头了,结果模型只能在训练集上有很好的表现,在其他数据集上表现偶读不好)。
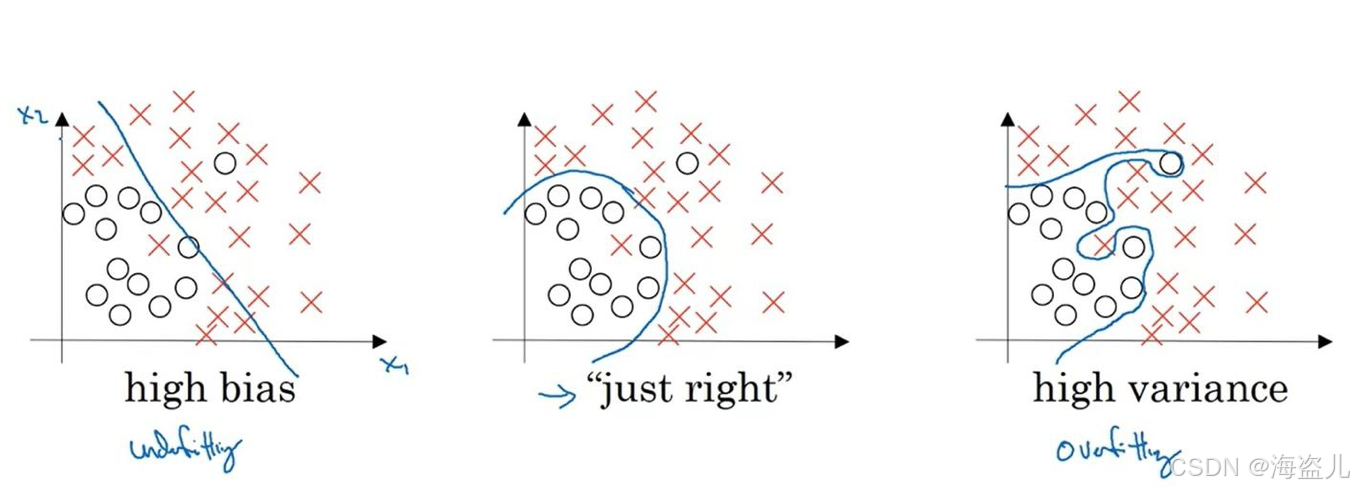
分别是前拟合,“恰好”,过拟合三种情况。
对于欠拟合的情况来说,一条直线并不足以把两类点分开,这个模型的整体表现较差。
对于过拟合的情况来说,模型过分追求训练集上的正确,结果产生了一条很奇怪的曲线。由于训练数据是有噪声(数据的标签不完全正确)的,这样的模型在真正的测试上可能表现不佳。
让我们人类来划分的话,最有可能给出的是中间那种划分结果。在这个模型中,虽然有些训练集中的点划分错了,但我们会认为这个模型在绝大多数数据上更合适。当我们用更多的测试数据来测试这个模型时,中间那幅图的测试结果肯定是这三种中最好的。
要判断机器学习模型是否存在高偏差或高方差的现象,可以去观察模型的训练集误差和开发集误差。以下是一个判断示例:
| 情况 | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| 训练集误差 | 1% | 15% | 0.5% | 15% |
| 开发集误差 | 11% | 16% | 1% | 30% |
| 诊断结果 | 高方差 | 高偏差 | 低误差、低方差 | 高误差、高方差 |
也就是说,如果开发集和训练集的表现差很多,就说明是高方差;如果训练集上的表现都很差,就是高偏差。
上面这些结论建立在最优误差——贝叶斯误差(Beyas Error)是0%的基础上下的判断。很多时候,仅通过输入数据中的信息,是不足以下判断的。比如告诉一个人是长头发,虽然这个人大概率是女生,但我们没有100%的把握说这是女生。如果我们知道人群中留长发的90%是女生,10%是男生,那么在这个“长头发分辨性别”的任务里的贝叶斯误差就是10%。
假如上面那个任务的贝叶斯误差是15%,那么我们认为情况2也是一个低误差的情况,因为它几乎做到了最优的准确率。
1.5改进机器学习的基本方法
首先检查高偏差问题。如果模型存在高偏差,则应该尝试使用更复杂的网络、更多增加训练时间。
确保模型没有高偏差问题后,才应该开始检查模型的方差。如果模型存在高方差,则应该增加数据或使用正则化。
此外,使用更合理的网络架构,往往对降低误差和方差都有效。
1.6正则化
其实正则化的意思就是“为防止过拟合而添加额外信息的过程”。在机器学习中,一种正则化方法是给损失函数添加一些与参数有关的额外项,以调整参数在梯度下降中的更新过程。正则化的数学原理我们会在下一节里学习,这一节先认识一下正则化是怎么操作的。
对于简单的逻辑回归,我们应该如何加正则化项:
原本的逻辑回归损失函数是:
现在我们给它加一个和参数有关的项
右侧这个就是额外加进来的正则项。其中
是一个可调的超参数,
表示计算向量
的I2范数。即:
也就是说,某向量的l2范数就是它所有分量平方再求和。
类似地,其实向量也有1范数,也可以用来做正则化:
1范数就是向量所有分量取绝对值再求和。
使用1范数做正则化会导致参数中出现很多0。人们还是倾向使用l2范数做正则化。
看到这里,大家或许会有问题: b也是逻辑回归的参数,为什么 w有正则项, b就没有?实际上,要给 b 加正则项也可以。但是在大多数情况下,参数 w 的数量远多于 b ,和 w 相关的正则项几乎不会影响到最终的损失函数。为了让整个过程更简洁一些, b 的正则项就被省略了。
推广到神经网络时,添加正则项的方法是类似的,只不过参数w变成了矩阵,所以正则项是:
其中
这种矩阵范数叫做Frobenius范数,叫它F-范数就行了。
如之前的文章所述,对于梯度下降算法来说,定义损失函数的根本目的是为了对参数求导。当参数 W 在损失函数里多了一项后,它的导数会有怎样的变化呢?
对于某参数向量w 来说,其实它的导数就多了一项:
最终,参数向量w 会按如下的方式更新:
仔细一看,其实相较之前的梯度更新公式,只是w 的系数从1 变成了 。因此,用l2范数做正则化的方法会被称为 “权重衰减(Weight Decay)” ,
在某些编程框架中直接就被叫做
weight decay。
1.7为什么正则项可以减小方差
这个曲线之所以能够那么精确地过拟合,是因为这个曲线的参数过多。如果这个曲线的参数少一点,那么它就不会有那么复杂的形状,过拟合现象也会得到缓解。
也就是说,如果神经网络简单一点,每个参数对网络的影响小一点,那么网络就更难去过拟合那些极端的数据。
添加了正则项后,网络的参数都受到了一定的“惩罚”。因此,参数会倾向于变得更小,从而产生刚刚提到的减轻过拟合的效果。
1.8DropOut
还有一种常用的正则化方法叫做 dropout,即随机使神经网络中的一些神经元“失活”。如下图所示:
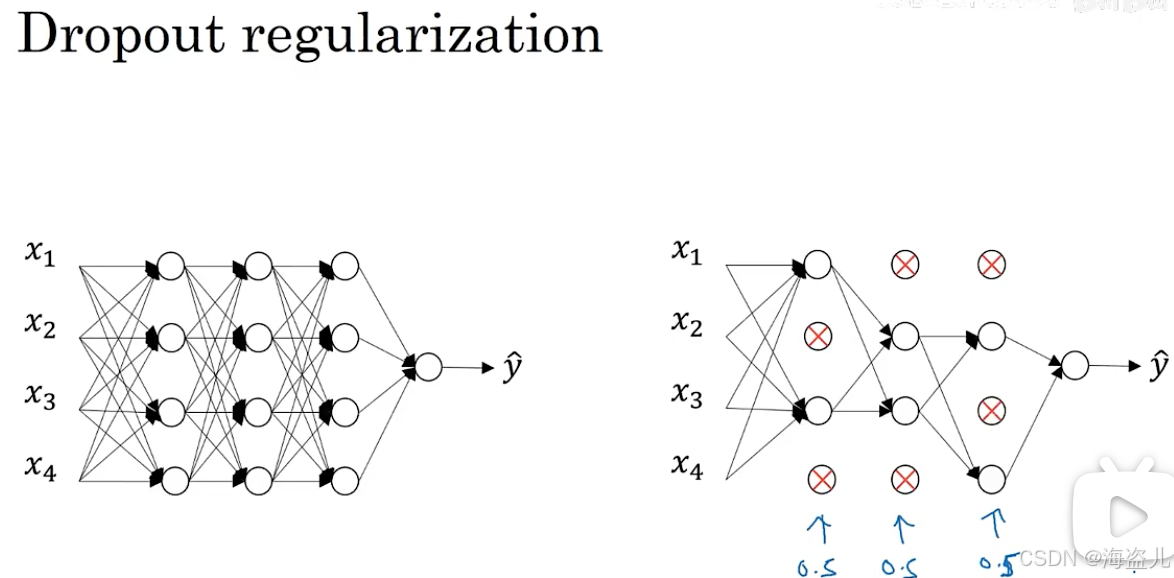
我们可以领所有神经元在每轮训练中有50%的几率失活。在某轮训练中,神经网络的失活情况可能会像上图中下半部分所示:那些打叉的神经元不参与计算和,整个神经网络变得简单了许多。
在实际中,常常使用一种叫“inveted dropout”的实现方法。inverted dropout思想是:
对于神经网络的每一层,生成一个有哪些神经元失活的“失活矩阵”,再用这个矩阵去乘以这一层的激活输出(做乘法即领没有失效的激活保持原值,失效的激活取0)
d = np.random.rand(a.shape[0], a.shape[1]) < keep_prob
a = a * d
a /= keep_prob这段代码中,d是失活矩阵。该矩阵通过一个随机数矩阵和一个保留概率keep_prob做小于运算生成。
np.random.rand 可以生成一个矩阵,其中矩阵中每个数都会均匀的随机出现在0~1之间。这样每个数小宇keep_prob的概率都是keep_prob。比如keep_prob=0.8 ,那么每个神经元都有80%的几率得到保留,20%的几率被丢弃。
做完小于运算之后,d其实是一个bool值矩阵。拿bool矩阵和一个普通的矩阵做逐对乘法,就等于bool矩阵为True的地方取普通矩阵的原值,bool矩阵为False的地方取0。
最后,得到了丢弃掉某些神经元的激活输出a后,我们还要做一个操作a /= keep_prob 。可以想象,如果我们丢掉了一些神经元,那么整个激活输出的“总和”的期望会变小。比如
keep_prob 为0.8,那么整个输出的大小都近似会变为原来的0.8倍。为了让输出的期望不变,我们要把激活输出除以keep_prob 。
如前文所强调地,dropout一次是对一层而言的。也就是说,每一层可以有不同的keep_prob。
dropout可能对损失函数变化曲线产生影响。一般调试时,如果损失函数一直在降,就说明训练算法没什么问题。但是,加入dropout后,由于每次优化的参数不太一样了,损失函数可能不会单调递减。因此,为了调试神经网络,可以先关闭dropout。确定损失函数确实在下降后,再开启它。
由于在CV(计算机视觉)中,图像的输入规模都很大,数据不足而引起过拟合是一件常见的事。因此,dropout在CV中被广泛应用。
注意,dropout是一种训练策略。在测试的时候,不需要使用dropout。
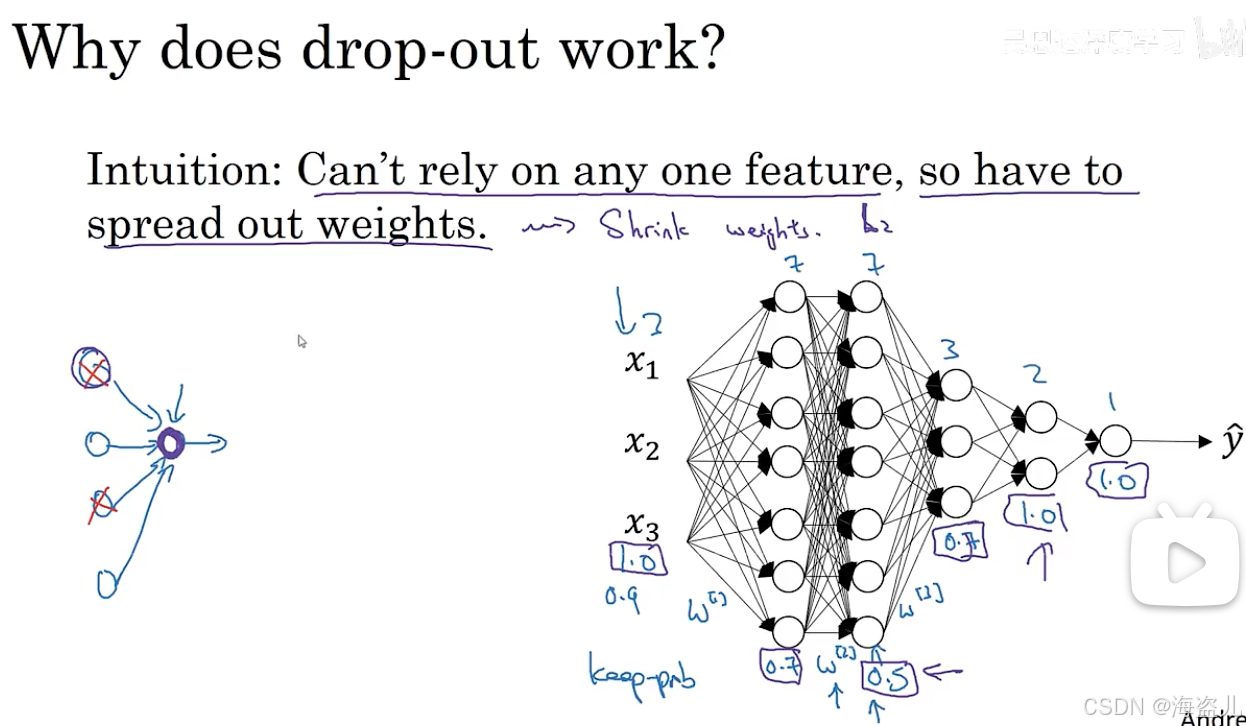
为什么dropout能够生效。有了dropout,意味着神经网络的权重不能集中在部分神经元上,因为某个神经元随时都可能会失效。因此,神经网络的权重会更加均衡。更加平均,意味着计算参数平方的I2会更小。也就是说,dropout令参数更平均,起到了和刚刚添加l2正则类似的效果。
1.9其他正则化方法
1.数据增强
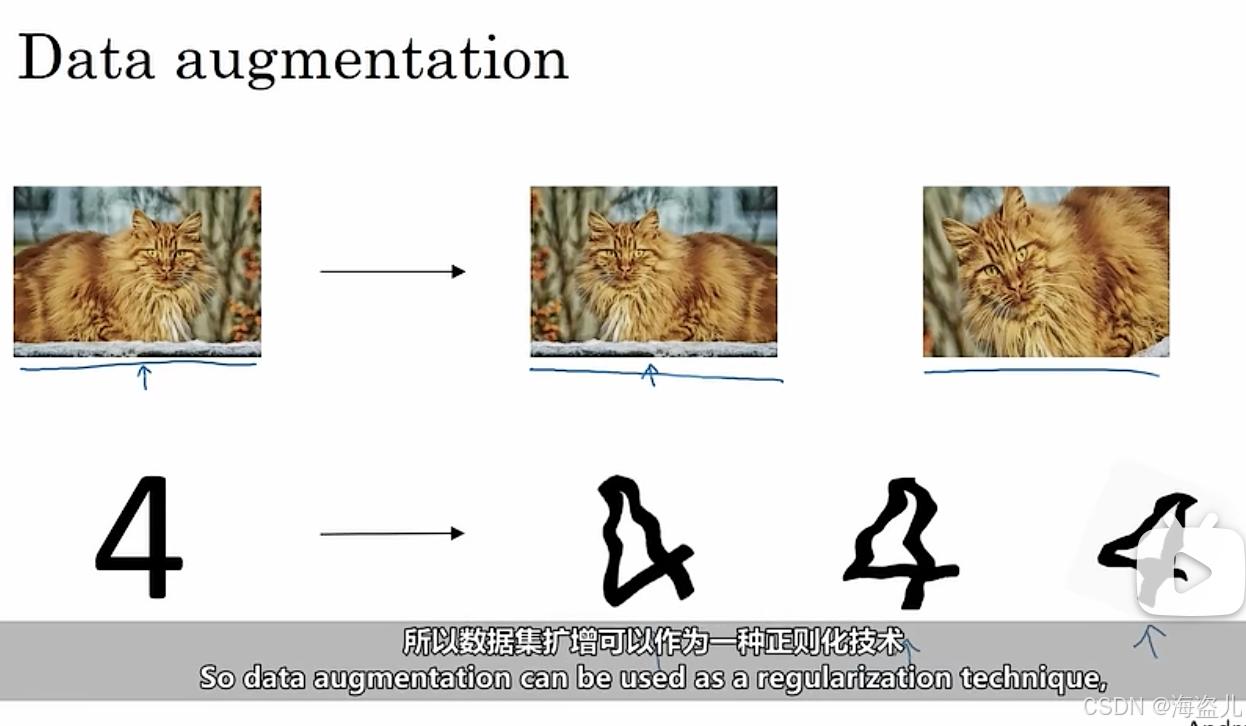
比如对于一幅图片,我们可以翻转、旋转、缩进,以生成“更多”的训练数据。
2.提前停止
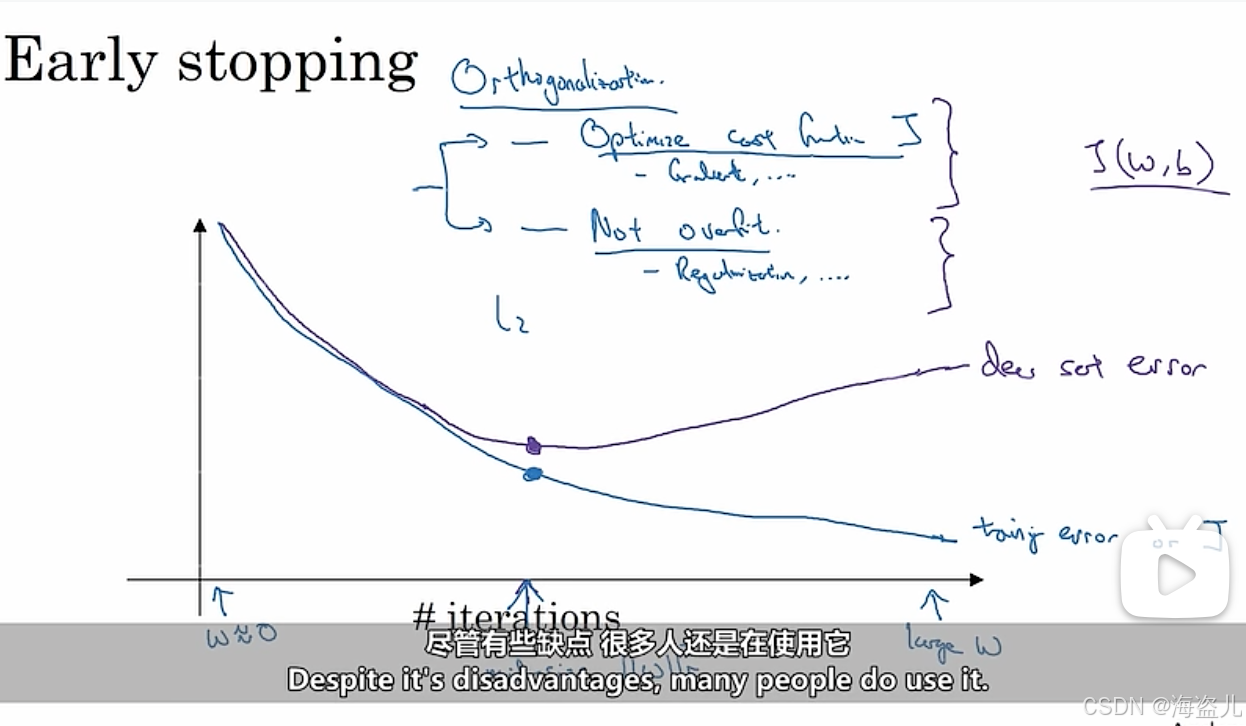
随着训练的进行,网络的损失函数可能越来越小,但开发集上的error会越来越高。只是因为训练得越久,参数就会越来越大,即越来越倾向于过拟合。提早结束训练,能够让参数取到一个合适的值。
提前中止也有一些不好的地方。在机器学习中,训练模型可以分成两部分:让损失函数更小、防止模型过拟合。我们通常会对这两部分独立地进行优化,即控制优化方法不变,改变正则化方法;或者改变减小梯度的算法,保证模型不进行任何正则化操作。而提前中止实际上混淆了减小损失函数和防止模型过拟合这两件事,不利于采取更多的调试策略。
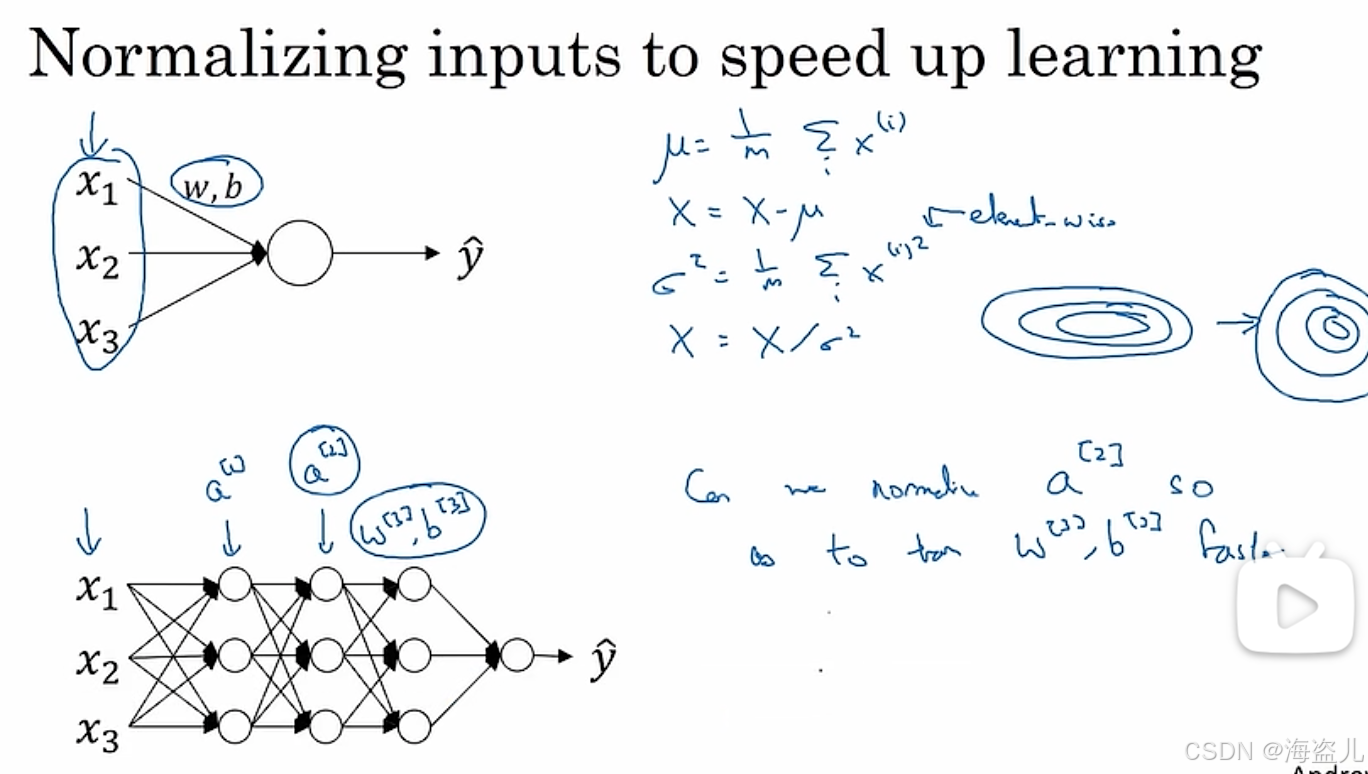
3.输入归一化(Normalization)
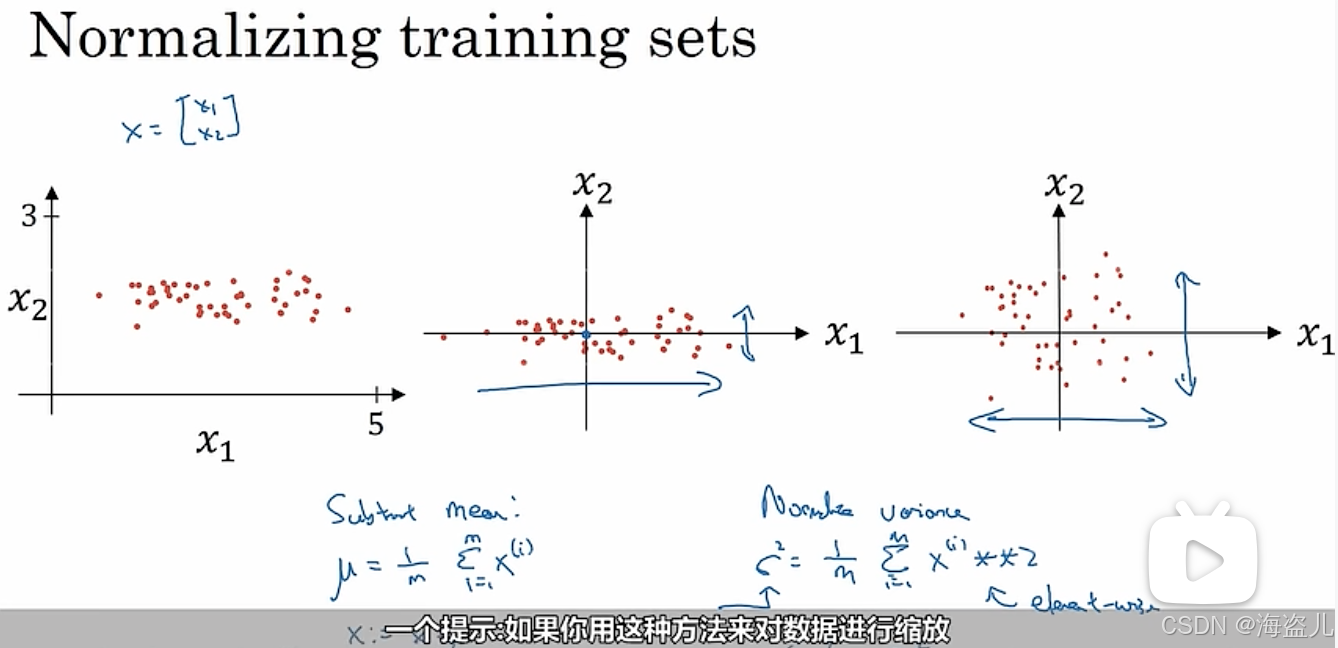
假设如果左一图所示,每个输出张量长度为2,即两个分量:。我们可以认为每个输入向量就是一个二维平面上的点。统计完了所有样本,我们或许可以发现所有样本的
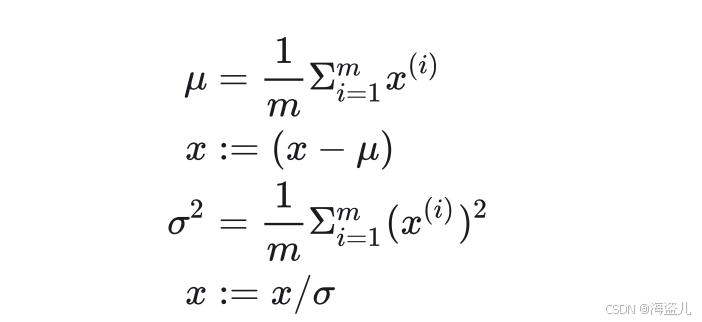
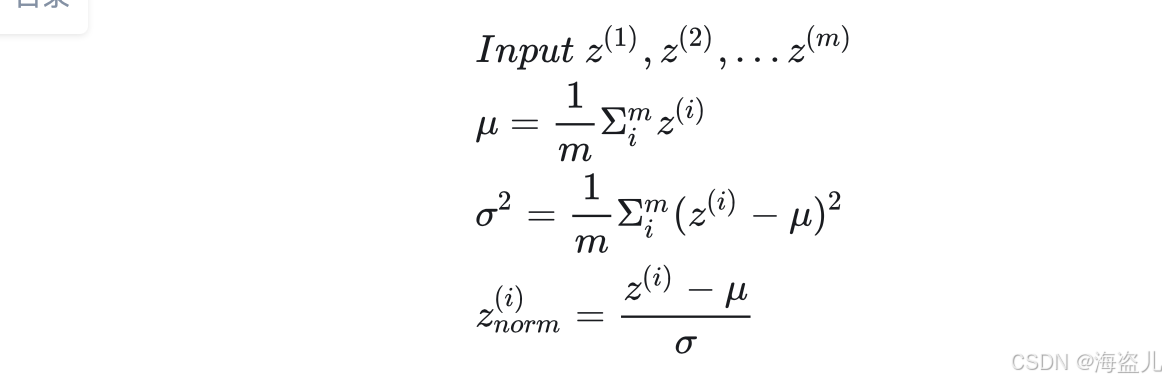
这两个区间,两个区间长度不一。而且,数据在x1上比较分散和在x2上比较靠拢。这个训练样本显得非常凌乱。如果我们让输入归一化,使输入向量的每一个分量都满足了正态分布,难么这些数据可能会长得像图3.这样,数据分布的区间不仅长度相同,而且离散的程度也相同了。归一化可以通过以下方式实现:
注意,上式中我们计算方差时没有减均值,这是因为第二步更新的时候均值已经被减掉了
简单概括这个数学公式,就是“减均值,除方差”。
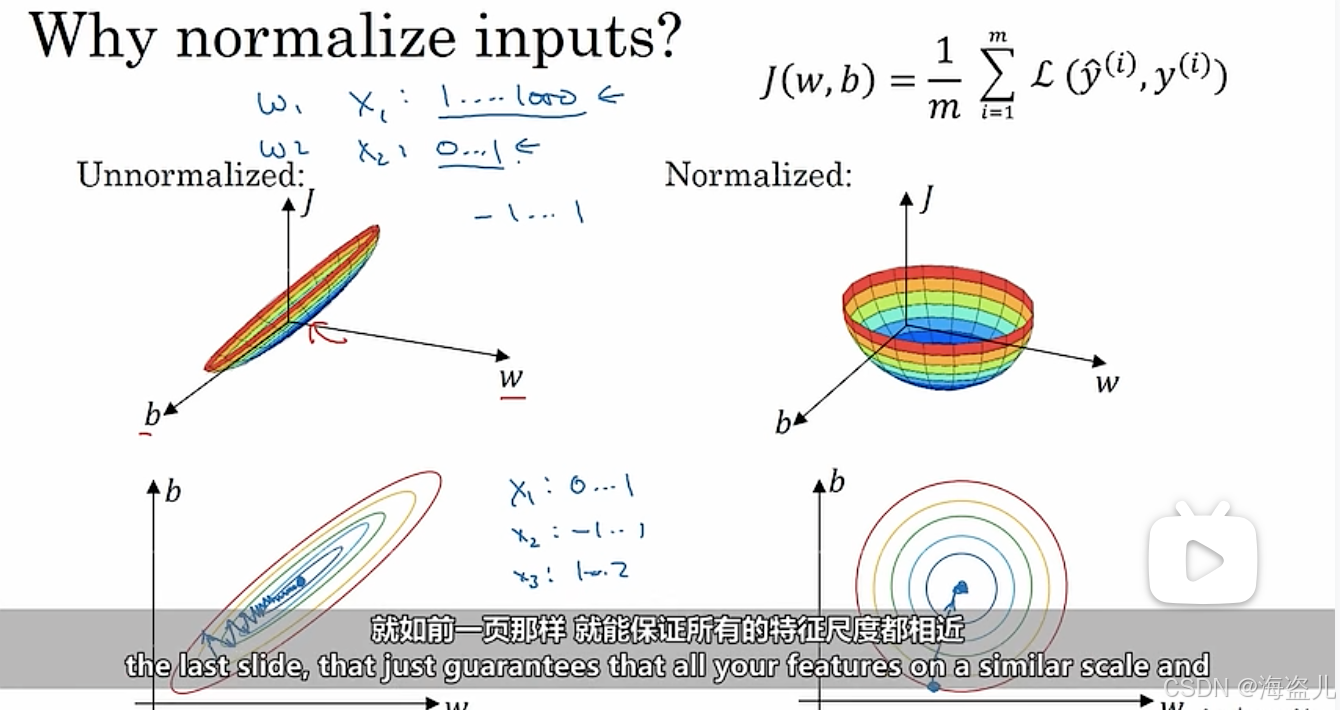
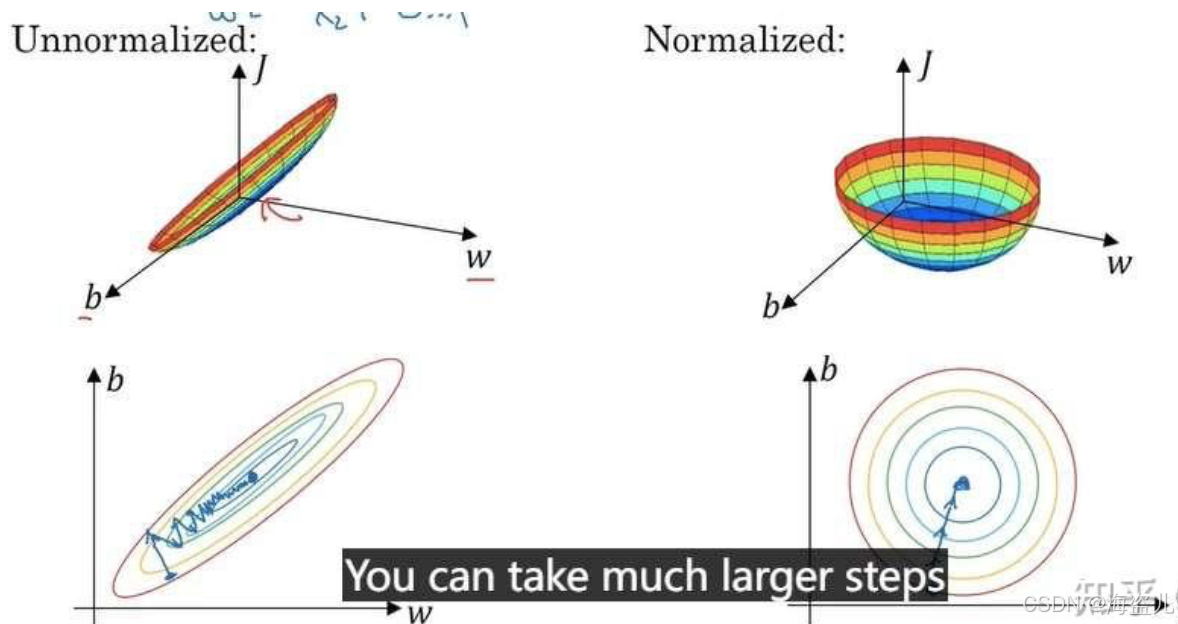
如果输入数据在各个分量上更加均匀,梯度下降的优化会更加便捷。
这里直接记住这个结论,不用过于在意它的数学原理。一种比较直观的解释是:如果分量大小不一,则参数w的每个分量的“作用”也会大小不一。如果w的每个分量都按差不多的“步伐”进行更新,那些“影响力更大”的w分量就会更新得过头,而“影响力更小”的w分量就更新得不足。这样,梯度下降法要耗费更多步才能找到最优值。如下图更新切面经过处理之后。
1.10梯度爆炸/弥散
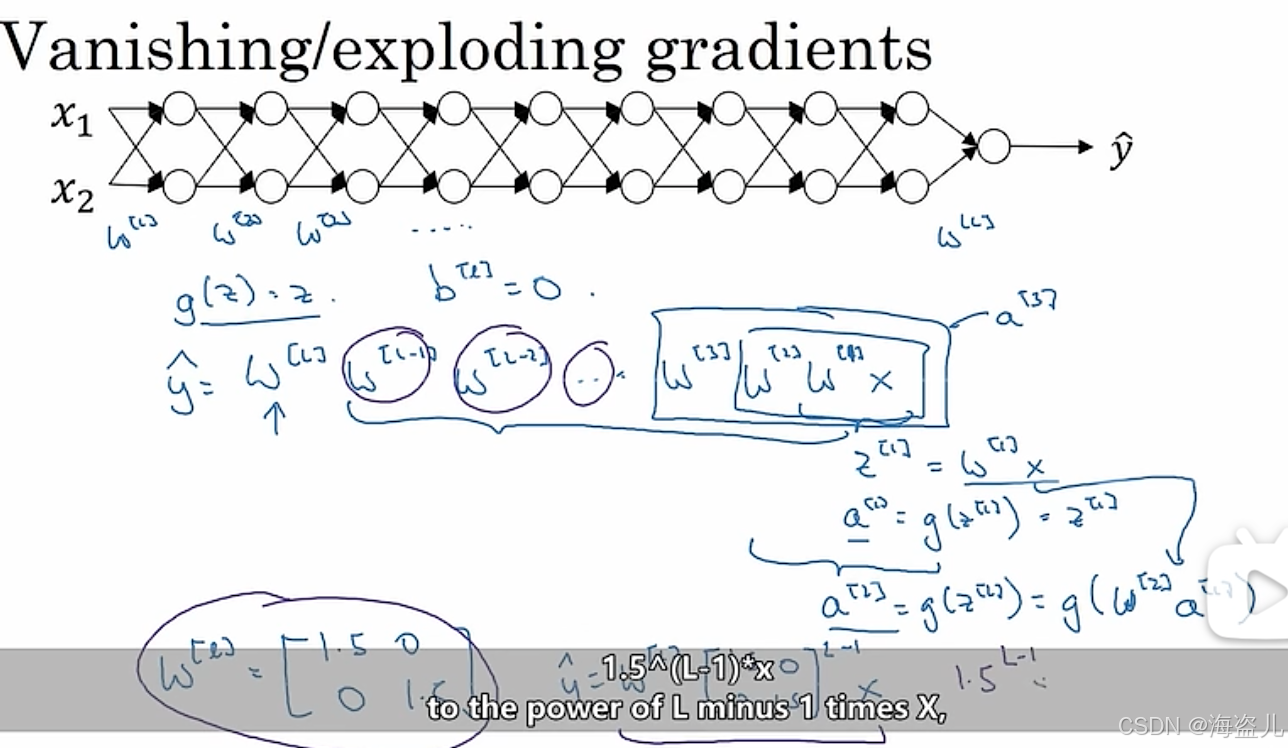
如果一个神经网络的层数过深,可能会出现梯度极大或极小的情况,让我们看看这是怎么回事。

假设我们有上图这样一个很深的神经网络。我们取消所有的激活函数()取消所有参数 (即 ),那么这个网络的公式就是
其中 都是2*2的矩阵,我们不妨假设他们都是同样的矩阵,那么上式可以写成
如果W是这个样子:
那么经过 次矩阵乘法后,这个矩阵就变成这个样子:
由于这里的数值是随着 成指数增长的, 稍微取一个大一点的值,最后算出来的 就会特别大。回顾一下前面的知识,最后一层的 ,而 又是和 相关的。最后的 很大,会导致所有算出来的梯度都很大。
同理,如果矩阵里的数不是1.5,而是0.5,那么整个公式的数值就会指数级下降,从而导致梯度近乎“消失”。
1.11梯度问题的解决方法——加权初始化
我们刚刚讲到,梯度会爆炸或者弥散,本质原因是矩阵W的“大小”大于了1或者小于了1,从而使最后的计算结果过大或过小。但反过来想,如果我们令每一层的输出 A 的“大小”都在1附近,那么是不是就不会有梯度指数级变化的问题了呢?
让我们来看看该如何让每层输出都保持一个合适的值。我们考察
这个简单的网络。从直觉上看,如果n 越大,则公式里的项越多,Z 也越大。事实上,用统计学知识计算过后,能知道:若 都是满足标准正态分布的,则 Z 的方差是n 。我们不希望 n的值太大或太小,希望能通过修改
的大小,让 Z 的方差尽可能等于1。
为了做到这一点,我们可以在的初始化方法上做一点文章,我们可以改变
的方差,以改变Z的方差。其实,我们只需要令
的方差为
就行了。用代码表示就是这样的:
W_l = np.random.randn(shape) * np.sqrt(1 / n[l-1])这里n[l-1] 是第l层参数矩阵W_l 的长度,即每个参数向量w 的长度。
但由于每一层的输入不是Z,而是,我们在算方差时还要考虑到激活函数g的影响。
使用 Relu 时,初始化的权重用np.sqrt(2/ n[l-1]) 比较好,即用下面的代码:
W_l = np.random.randn(shape) * np.sqrt(2 / n[l-1])对于tanh函数,令权重为np.sqrt(1 / n[l-1]),
这叫做 Xavier Initialization。还有研究表明用 np.sqrt(2 / (n[l-1]+n[l])) 也行。
总结一下,为了缓解梯度爆炸或梯度弥散的问题,可以对参数使用加权初始化。只需要初始化时多乘一个小系数,这个问题就能很大程度上有所缓解。
1.12梯度检查
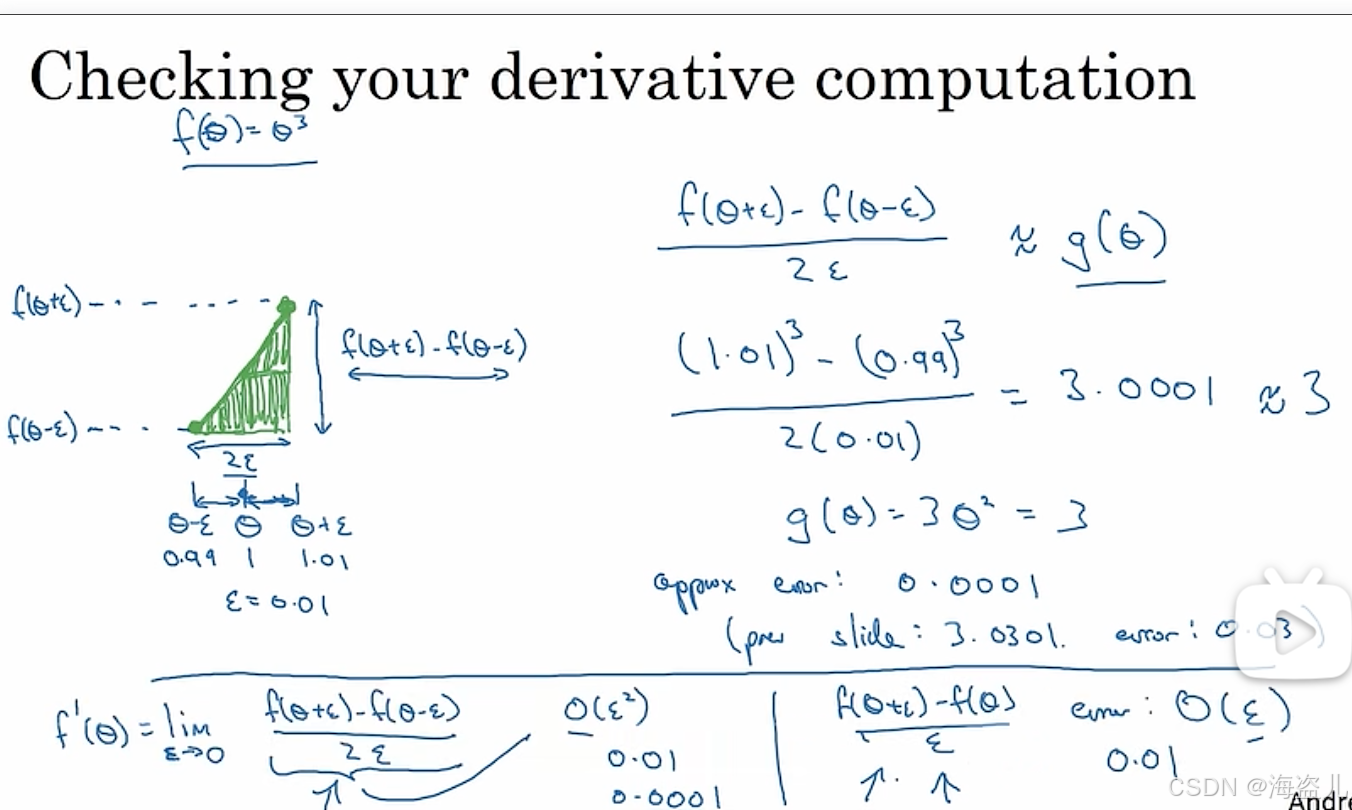
进行深度学习编程时,梯度计算时比较容易出BUG的地方,我们可以用一种简单的方法来近似估计一个函数的导数,并将其与我们算出来的导数做一个对比,看看我们的导数计算函数有没有写错。
导数估计公式如下:
这个式子随收敛的较快,准确来说:
当 时,上面(2)收敛速度为
,(3)式的收敛速度是
。选用(3)式估计导数是一个更好的选择。
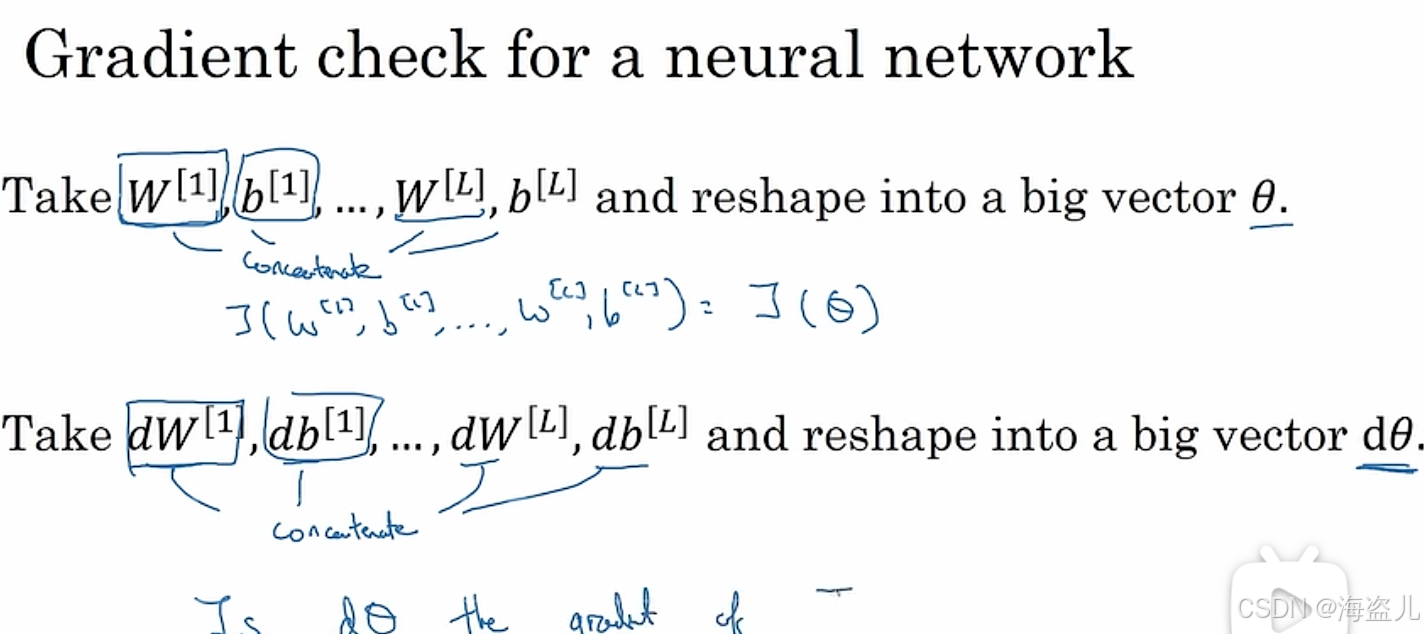
我们可以利用上面的公式调试深度学习中的梯度计算。其步骤如下:
1. 把所有参数 reshape 成向量,再把所有向量拼接(concatenate)成一个新向量
2.现在,我们有损失函数和导数
。
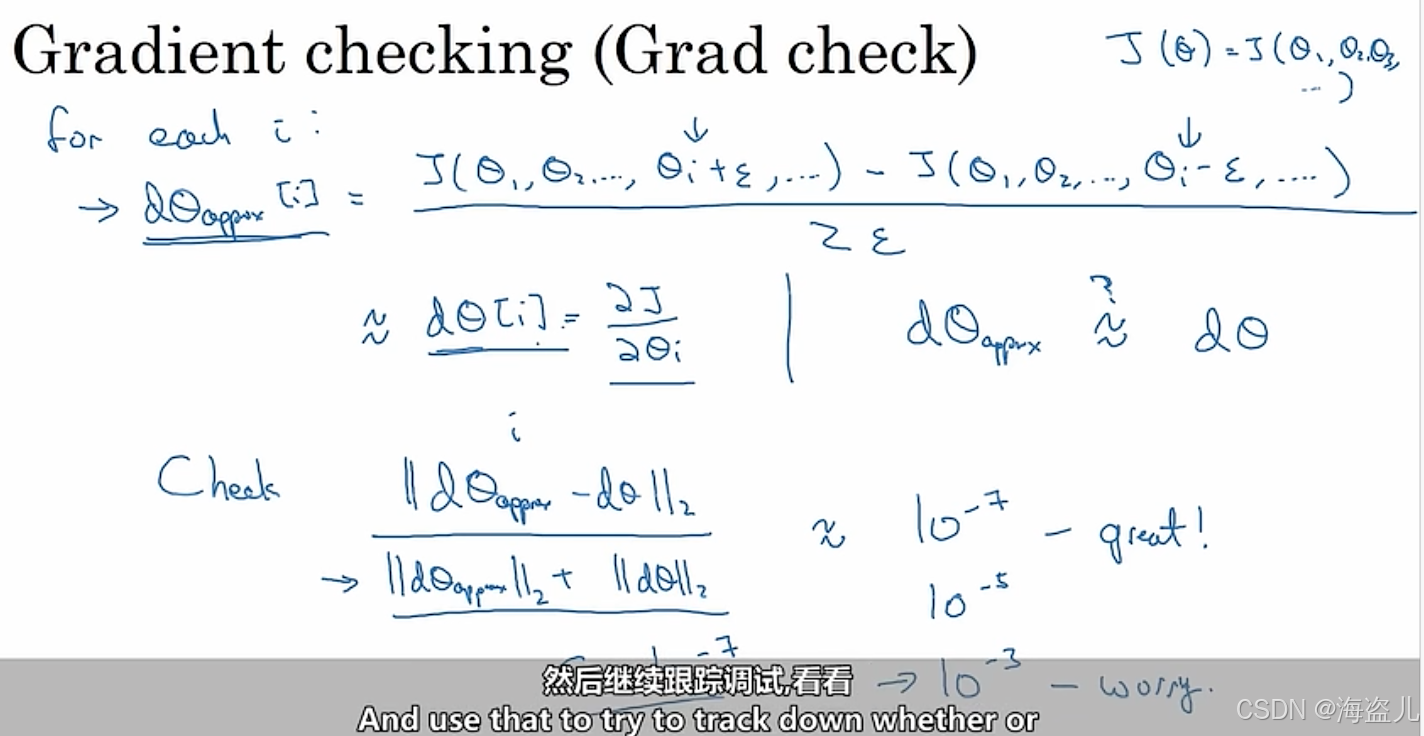
3.对于某一个参数,计算其导数估计值:
4.比较,
计算误差值:
5.遍历 计算误差值:
5.遍历所有,做这个检查。
一般可以令。如果error在
这个量级,则说明导数计算得没什么问题。
可能要注意一下,而
则大概率说明这里的导数算得有问题。
使用此梯度检查法时,有一些小提示:
- 不要每次训练的都用,只在训练前调试用。
梯度检查确实很慢,计算复杂度是(这里没有用大O标记,因为复杂度的下界是那个值,而不是上界)(这个复杂度是
乘上算一遍推理的运算量得来的。推理至少遍历每个参数一遍,所以推理的复杂度是
)。
- 如果梯度检查出现了问题,尝试debug具体出错的参数。
- 别忘记损失函数中的正则化项。
- 无法调试 dropout.
- 有时候,当W,b 过大时导数的计算才会出现较大的误差。可以尝试先训练几轮网络,等参数大了,再做一次梯度检查。
这堂课的信息量十分大。让我们总结一下:
- 数据集划分
- 训练集/开发集/测试集的意义
- 怎么去根据数据规模划分不同的数据集
- 偏差与方差
- 如何分辨高偏差与高方差问题
- 高偏差与高方差问题的一般解决思路
- 正则化
- 权重衰减
- dropout
- 数据增强
- 提前停止
- 梯度问题
- 梯度问题的产生原因
- 缓解梯度问题的方法
- 梯度检查的实现
这堂课中,正则化和参数带权初始化是两个很重要的话题,展开来的话有很多东西要学。过段时间,我会在课堂内容的基础上,对这些知识进行拓展介绍。
二.改进梯度下降算法(mini-batch, Momentum, Adam)
一直以来,我们都用梯度下降法作为神经网络的优化算法。但是,这个优化算法还有很多的改进空间。在这节课中我们将学习一些更高级的优化技术,希望能够从各个方面改进普通的梯度下降算法。
我们要学习的改进技术有三大项:分批梯度下降、高级更新方法、学习率衰减。这三项是平行的,可以同时使用。
分批梯度下降时从数据集的角度改进梯度下降,我们没必要等遍历完了整个数据集后再进行参数更新,而是可以遍历完一小批数据后就进行更新。
高级更新方法是指不使用参数的梯度值,而是使用一些和梯度相关的中间结果来更新参数,通过使用这些更高级的优化算法,我们能令指令参数更新的更加平滑,更容易收敛到最优值,这些高级的算法包括gradient descent with momentum, RMSProp, Adam。其中Adam是前两种算法的结合版,这是目前最流行的优化器之一。
学习率衰减指的是随着训练的进行,我们可以想办法减小学习率的值,从而减少参数的震荡,令参数更快地靠近最优值。
在这周的课里,我们要更关注每种优化算法的单独、组合使用方法,以及应该在什么场合用什么算法,最后再去关注算法的实现原理。对于多数技术,“会用”一般要优先于“会写”。
2.1分批梯度下降
方法的本质区别是是否把整个数据集分成多个子集。
2.11使用mini-batch
在之前的学习中,我们都是用整个训练集的平均梯度来更新模型参数的。而如果训练集特别大的话,遍历整个数据集要花很长时间,梯度下降的速度将十分缓慢。
其实,我们不一定要等遍历完了整个数据集再做梯度下降。相较于每次遍历完所有个训练样本再更新,我们可以遍历完一小批次(mini-batch)的样本就更新。让我们来看课件里的一个例子:
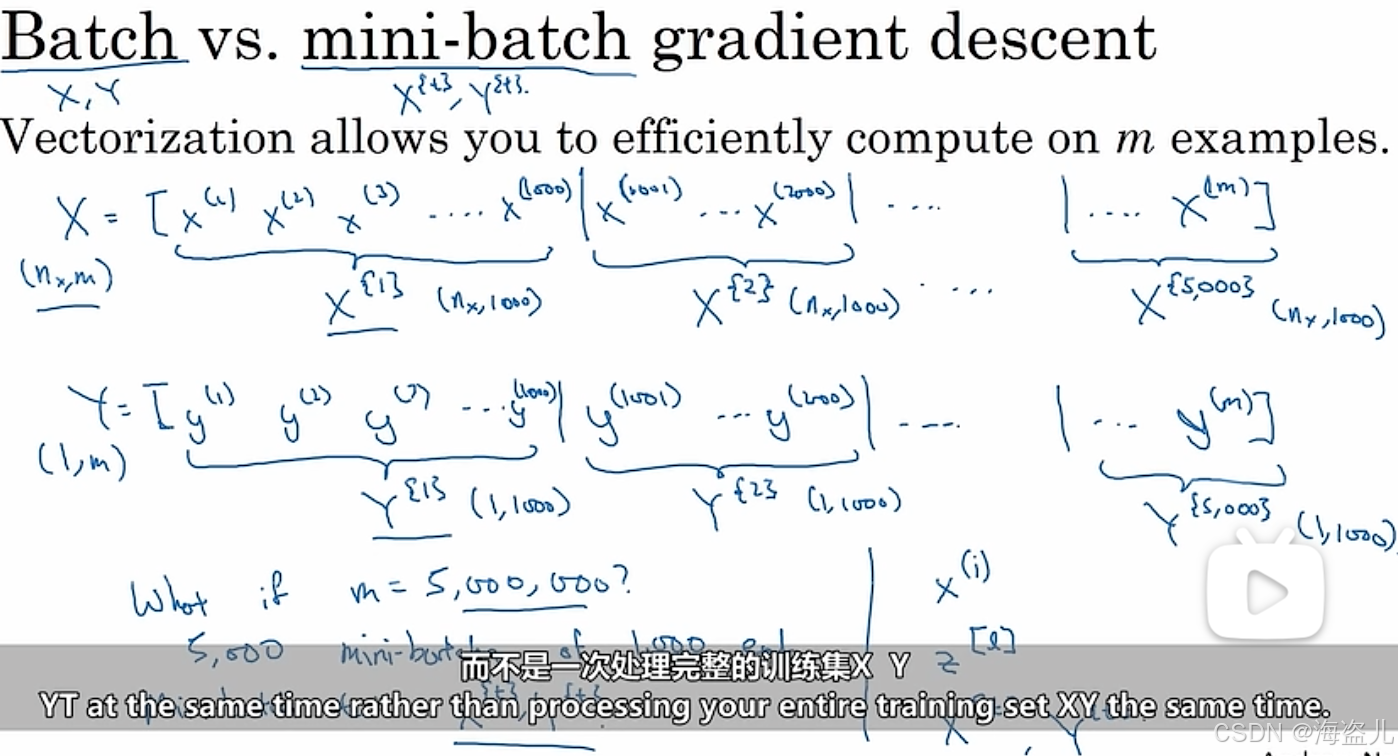
假设整个数据集大小。我们可以把数据集划分成5000个mini-batch,其中每一个batch包含1000个数据。做梯度下降时,我们每跑完一个batch里的1000个数据,就用它们的平均梯度去更新参数,再去跑下一个batch。
这里要介绍一个新的标记。设整个数据集X的形状是,则第i个数据集的标记为
,形状为
。
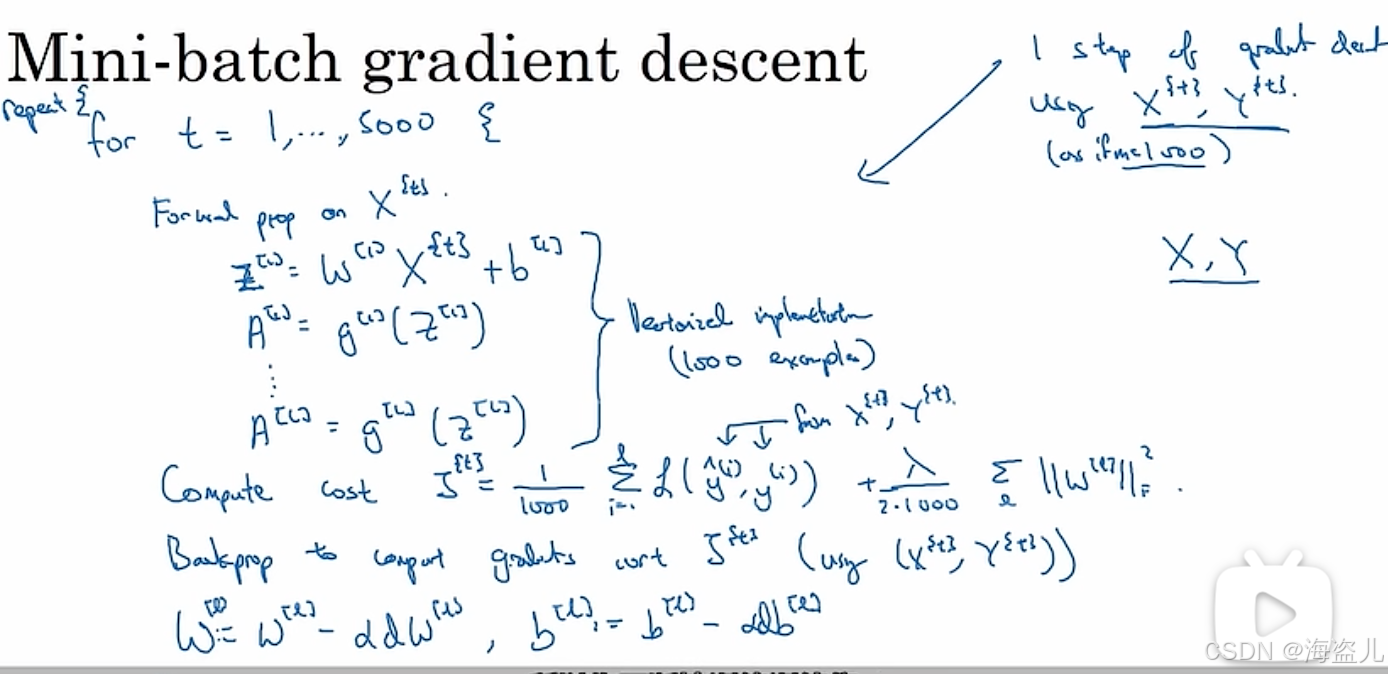
使用了分批梯度下降后,算法的写法由
for i in range(m):
update parameters
变成
for i in range(m / batch_size)
for j in range(batch_size):
update parameters
现在的梯度下降法每进行一次内层循环,就更新一次参数。我们还是把一次内层循环称为一个"step(步)"。此外,我们把一次外层循环称为一个"epoch(直译为'时代’,简称‘代’)",因为每完成一次外层循环就意味着训练集被遍历了一次。
2.12mini-batch的损失函数变化趋势
使用分批梯度下降后,损失函数的变化趋势会有所不同:
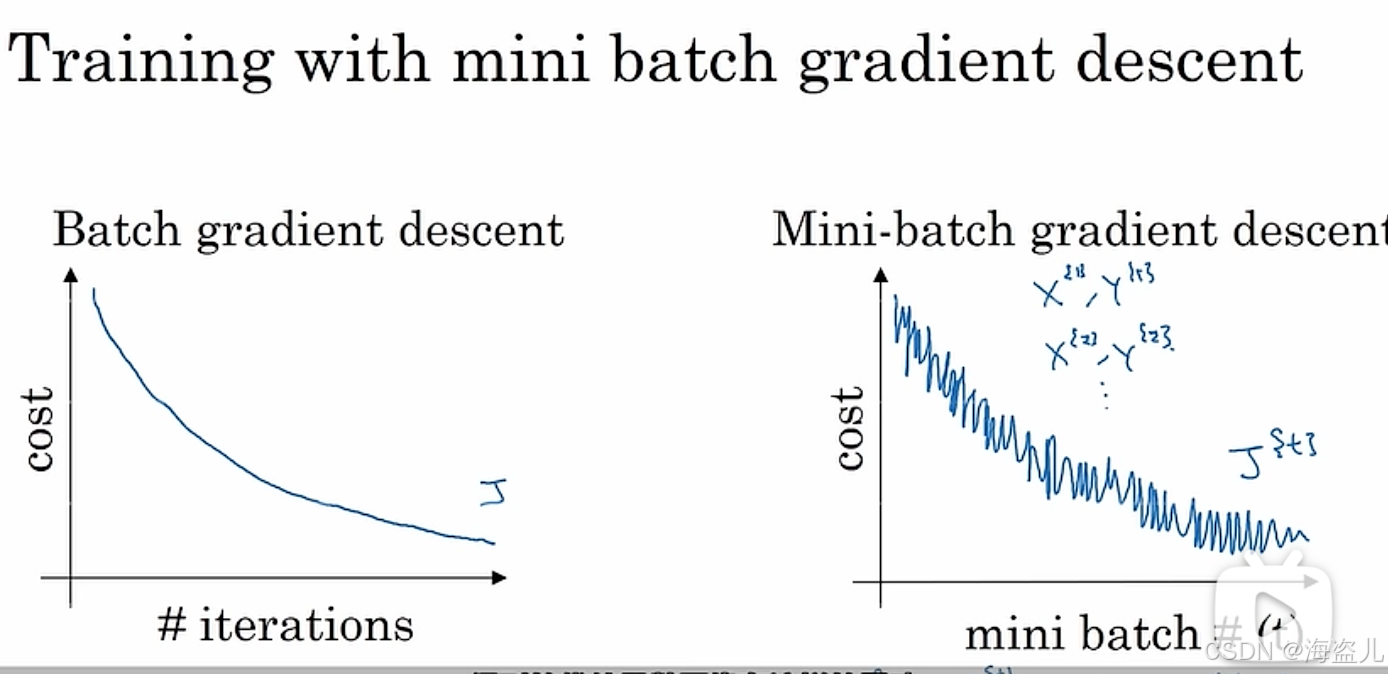
如上图所示,如果是使用整批梯度下降,则损失函数会一直下降。但是,使用分批梯度下降后,损失函数可能会时升时降,但总体趋势保持下降。
这种现象主要是因为之前我们计算的是整个训练集的损失函数,而现在计算的是每个mini-batch的损失函数。每个mini-batch的损失函数时高时低,可以理解为:某批数据比较简单,损失函数较低;另一批数据难度较大,损失函数较大。
2.13选择批次大小
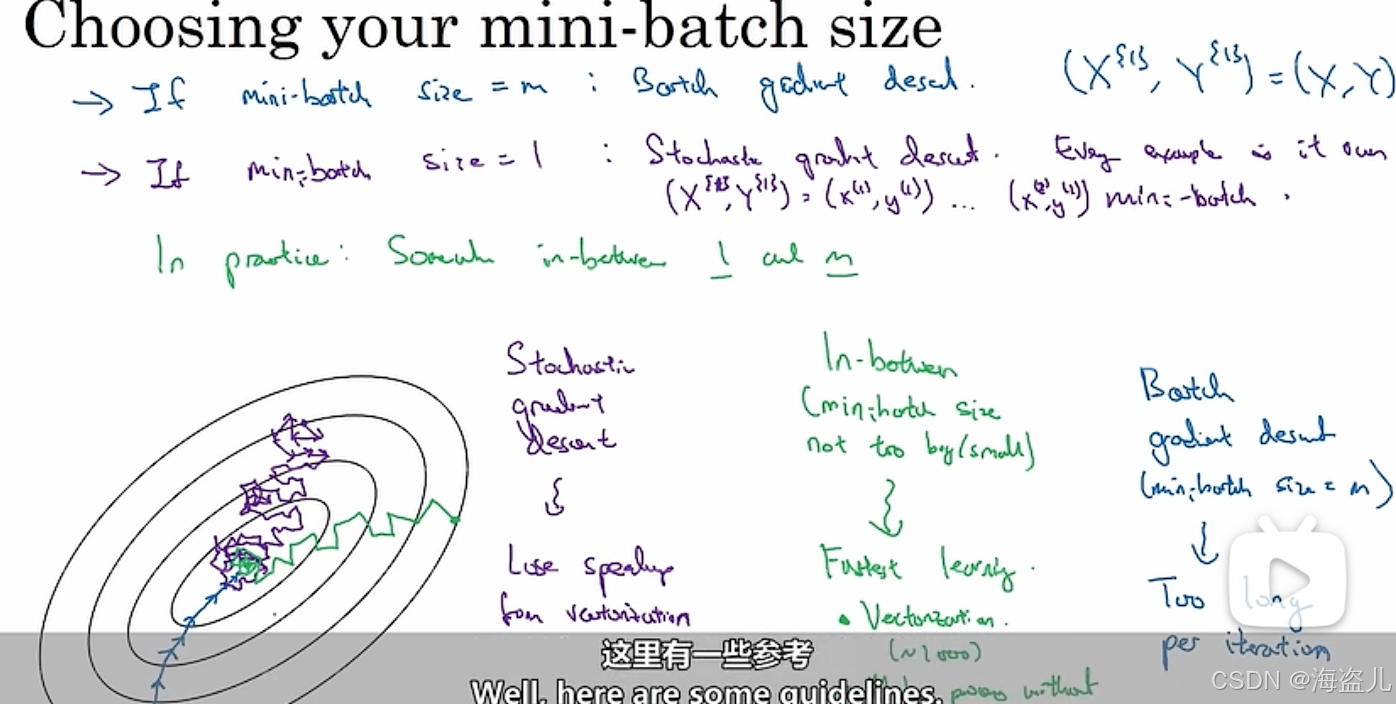
批次大小(batch size)对训练速度有很大的影响。
如果批次过大,甚至极端情况下batch_size=m,那么这等价于整批梯度下降。我们刚刚也学过了,如果数据集过大,整批梯度下降是很慢的。
如果批次过小,甚至小到batch_size=1(这种梯度下降法有一个特别的名字:随机梯度下降(Stochastic Gradient Descent)),那么这种计算方法又会失去向量化计算带来的加速效果。
回想一下第二周的内容:向量化计算指的是一次对多个数据做加法、乘法等运算。这种计算方式比用循环对每个数据做计算要快。
出于折中的考虑,我们一般会选用一个介于1-m之间的数作为批次大小。
如果数据集过小(m<2000),那就没必要使用分批梯度下降,直接拿整个数据集做整批梯度下降即可。
如果数据集再大一点,就可以考虑使用64, 128, 256, 512这些数作为batch_size。这几个数都是2的次幂。由于计算机的硬件容量经常和2的次幂相关,把batch_size恰好设成2的次幂往往能提速。
当然,刚刚也讲了,使用较大batch_size的一个目的是充分利用向量化计算。而向量化计算要求参与运算的数据全部在CPU/GPU内存上。如果设备的内存不够,则设过大的batch_size也没有意义。
2.2 指数加权移动平均
假设我们绘制了某年每日气温的散点图:
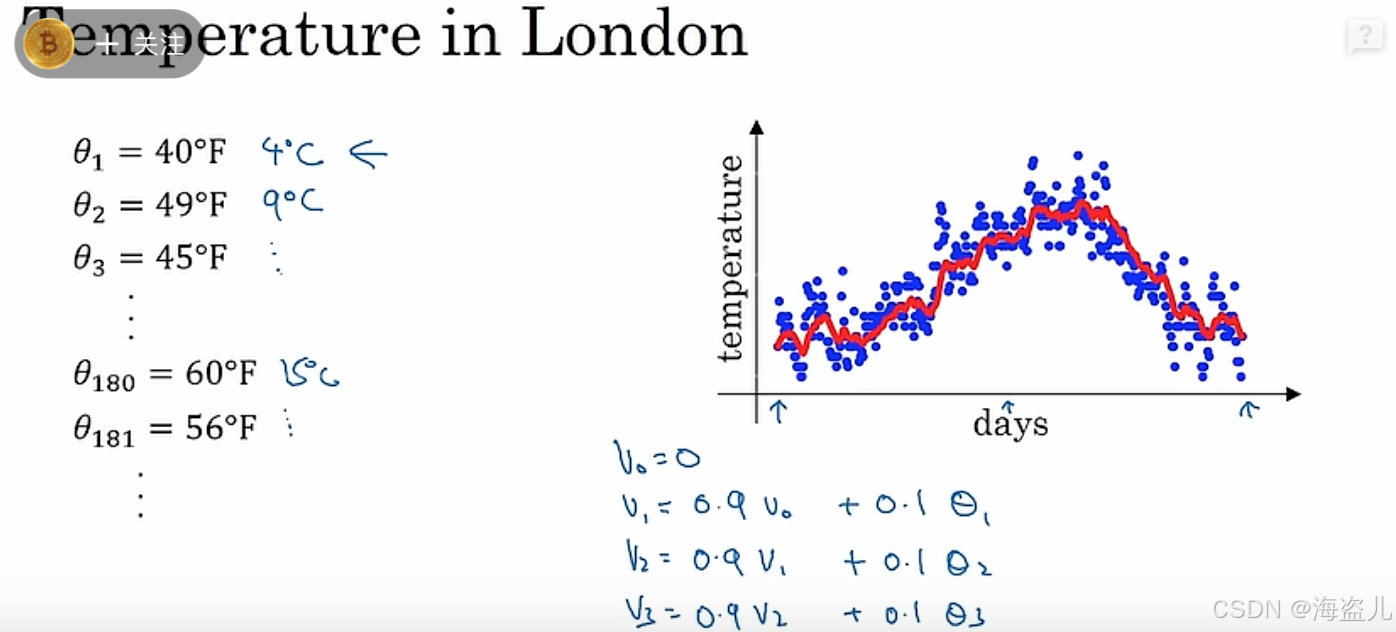
假如让你来描述全年气温的趋势,你会怎么描述呢?
作为人类,我们肯定会说:“这一年里,冬天的气温较低。随后气温逐渐升高,在夏天来到最高值。夏天过后,气温又逐渐下降,直至冬天的最低值。”
但是,要让计算机看懂天气的变化趋势,应该怎么办呢?直接拿相邻的天气的差作为趋势可不行。冬天也会出现第二天气温突然升高的情况,夏天也会出现第二天气温突然降低的情况。我们需要一个能够概括一段时间内气温情况的指标。
2.21 移动平均数
一段时间里的值,其实就是几天内多个值的总体情况。多个值的总体情况,可以用平均数表示。严谨地来说,假如这一年有365天,我们用t表示这一年每天的天气,那么:
我们可以定义一种叫做移动平均数(Moving Averages) 的指标,表示某天及其前几天温度的平均值。比如对于5天移动平均数ma,其定义如下:
假如要让计算机依次输出每天的移动平均数,该怎么编写算法呢?我们来看几个移动平均数的例子:
通过观察,我们可以发现,
也就是说,在算n天里的m天移动平均数(我们刚刚计算的是5天移动平均数)时,我们不用在n次的外层循环里再写一个m次的循环,只需要根据前一天的移动平均数,减一个值加一个值即可。这种依次输出移动平均数的算法如下:
input temperature[0:n]
input m
def get_temperature(i):
return temperature[i] if i >= 0 and i < n else 0
ma = 0
for i in range(n):
ma += (get_temperature(i) - get_temperature(i - m)) / m
ma_i = ma
output ma_i这种求移动平均数的方法确实很高效。但是,我们上面这个算法是基于所有温度值一次性给出的情况。假如我们正在算今年每天温度的移动平均数,每天的温度是一天一天给出的,而不是一次性给出的,上面的算法应该怎么修改呢?让我们来看修改后的算法:
input m
temp_i_day_ago = zeros((m))
def update_temperature(t):
for i in range(m - 1):
temp_i_day_ago[i+1] = temp_i_day_ago[i]
temp_i_day_ago[0] = t
ma = 0
for i in range(n):
input t_i
update_temperature(t_i)
ma += (temp_i_day_ago[0] - temp_i_day_ago[m]) / m
ma_i = ma
output ma_i由于我们不能提前知道每天的天气,我们需要一个大小为m的数组temp_i_day_ago记录前几天的天气,以计算m天移动平均数。
上述代码的时间复杂度还是有优化空间的。可以用更好的写法去掉update_temperature里的循环,把计算每天移动平均数的时间复杂度变为。但是,这份代码的空间复杂度是无法优化的。为了算m天移动平均数,我们必须要维护一个长度为m的数组,空间复杂度一定是
。
对于一个变量的m移动平均数,的空间复杂度还算不大。但假如我们要同时维护l个变量的m移动平均数,整个算法的空间复杂度就是
。在l很大的情况下,m对空间的影响是很大的。哪怕m取5这种很小的数,也意味着要多花4倍的空间去存储额外的数据。空间复杂度里这多出来的这个m是不能接受的。
2.22 指数加权移动平均
作为移动平均数的替代,人们提出了指数加权移动平均数(Exponential Weighted Moving Average) 这种表示一段时期内数据平均值的指标。其计算公式为:
这个公式直观上的意义为:一段时间内的平均温度,等于上一段时间的平均温度与当日温度的加权和。
相比普通的移动平均数,指数平均数最大的好处就是减小了空间复杂度。在迭代更新这个新的移动平均数时,我们只需要维护一个当前平均数,一个当前的温度
即可,空间复杂度为
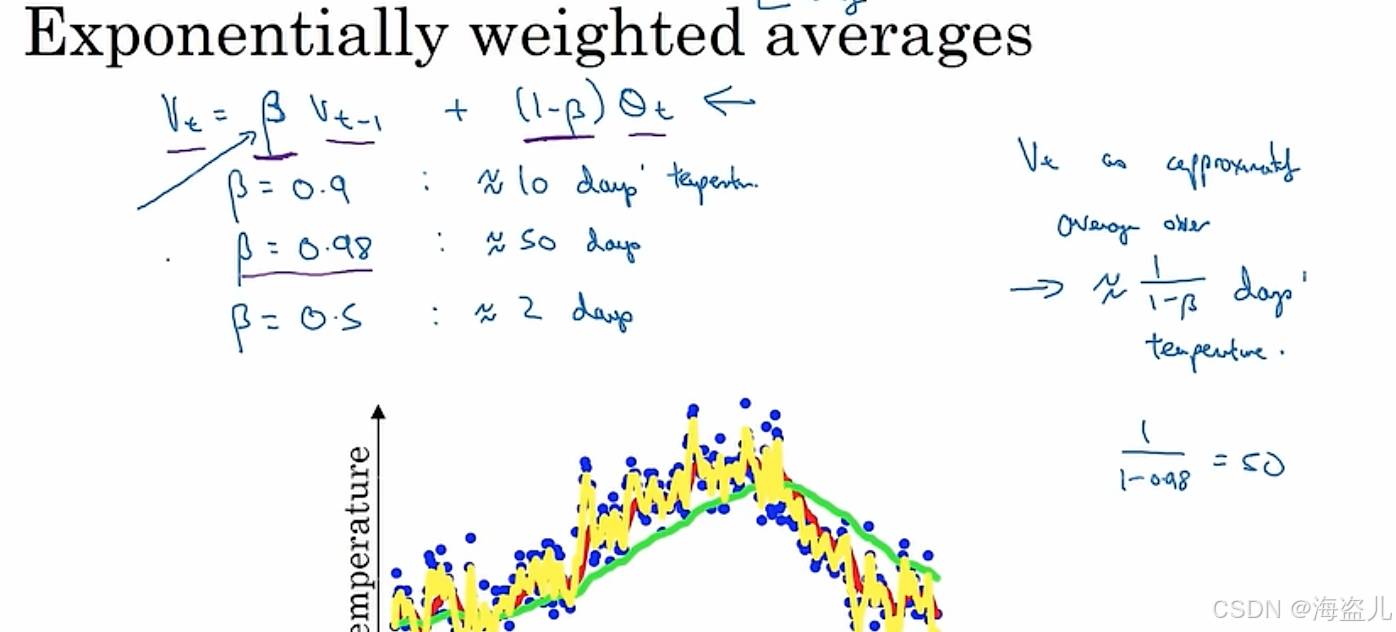
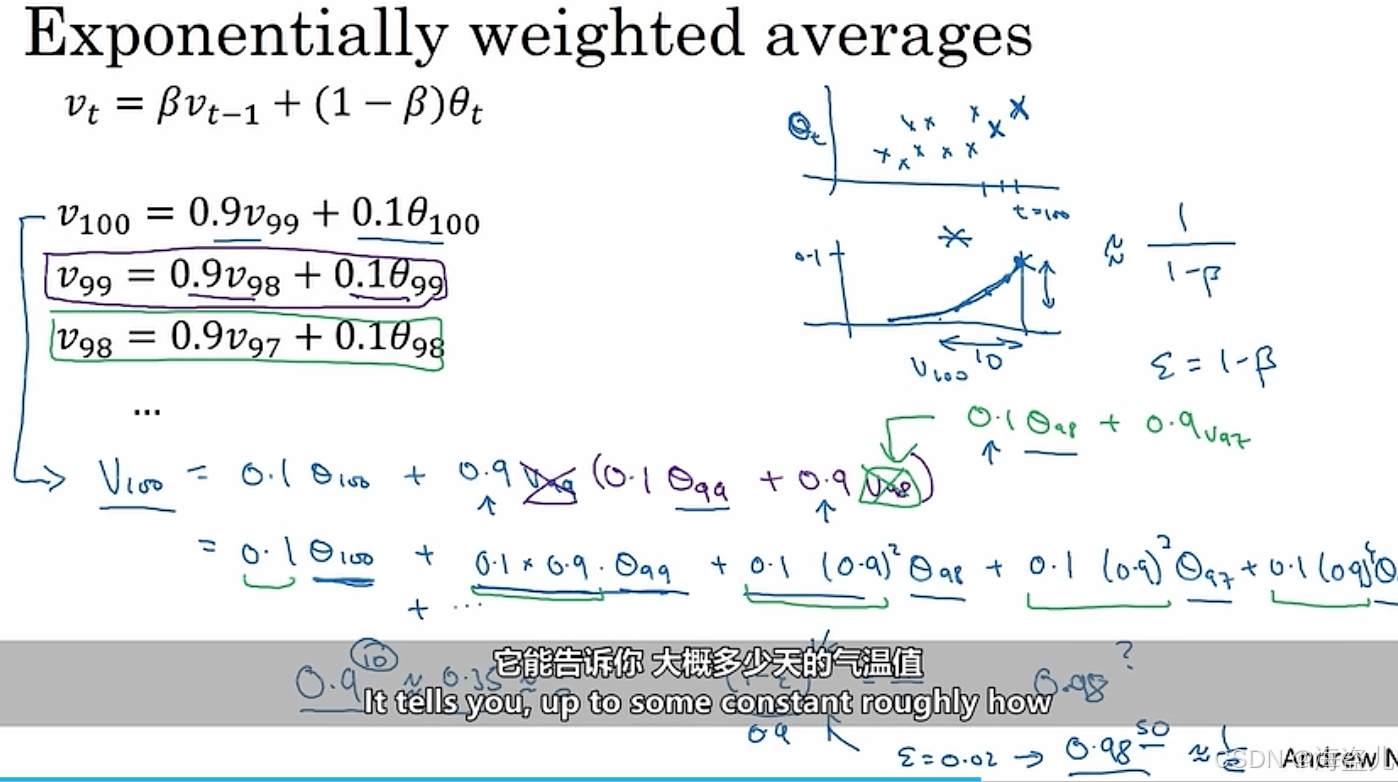
让我们进一步理解公式中的参数。把公式展开可得:
从这个式子可以看出,之前数据的权重都在以的速度指数衰减。根据
,并且我们可以认为一个数到了
就小到可以忽视了,那么指数平均数表示的就是天内数据的平均情况。比如
表示的是10天内的平均数据,
表示的是100天内的平均数据。
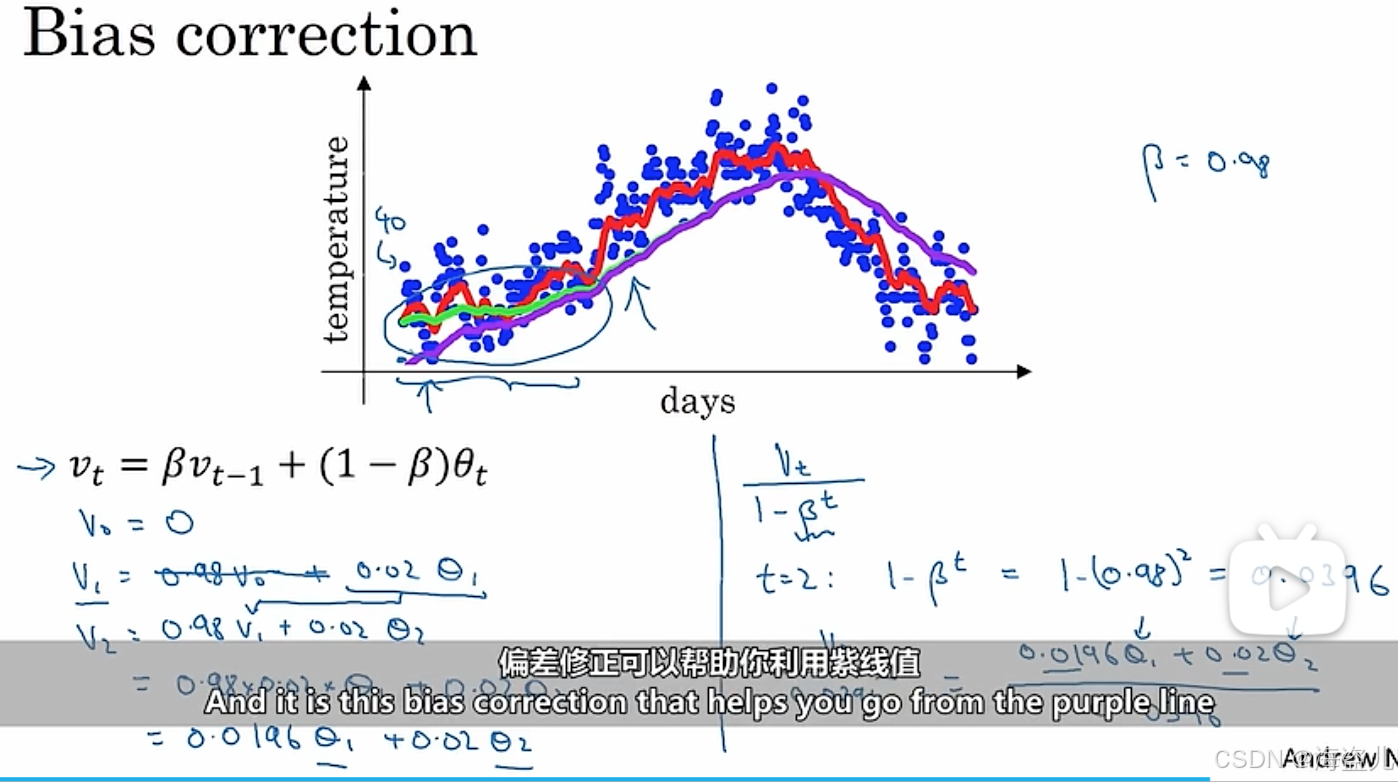
2.23 偏差矫正
指数平均数存在一个问题。在刚刚初始化时,指数平均数的值可能不太正确,请看:
让我们把每一项前面的权重加起来。对于,前面的权重和是
;对于,前面的权重和是
。显然,这两个权重和都不为1。而计算平均数时,我们希望所有数据的权重和为1,这样才能反映出数据的真实大小情况。这里出现了权重上的“偏差”.
为了矫正这个偏差,我们应该想办法把权重和矫正为1。观察刚才的算式可以发现,第项的权重和如下:
根据等比数列求和公式,上式化简为:
为了令权重和为1,我们可以令每一项指数平均数都除以这个和,即用下面的式子计算矫正后的指数平均数:
但是,在实践中,由于这个和收敛得很快,我们不会特地写代码做这个矫正。
2.3 Momentum
Gradient Descent with Momentum (使用动量的梯度下降) 是一种利用梯度的指数加权移动平均数更新参数的策略。在每次更新学习率时,我们不用本轮梯度的方向作为梯度下降的方向,而是用梯度的指数加权移动平均数作为梯度下降的方向。即对于每个参数,我们用下式做梯度下降:
也就是说,对于每个参数,我们用它的指数平均值代替进行参数的更新。
使用梯度的平均值来更新有什么好处呢?如下图所示
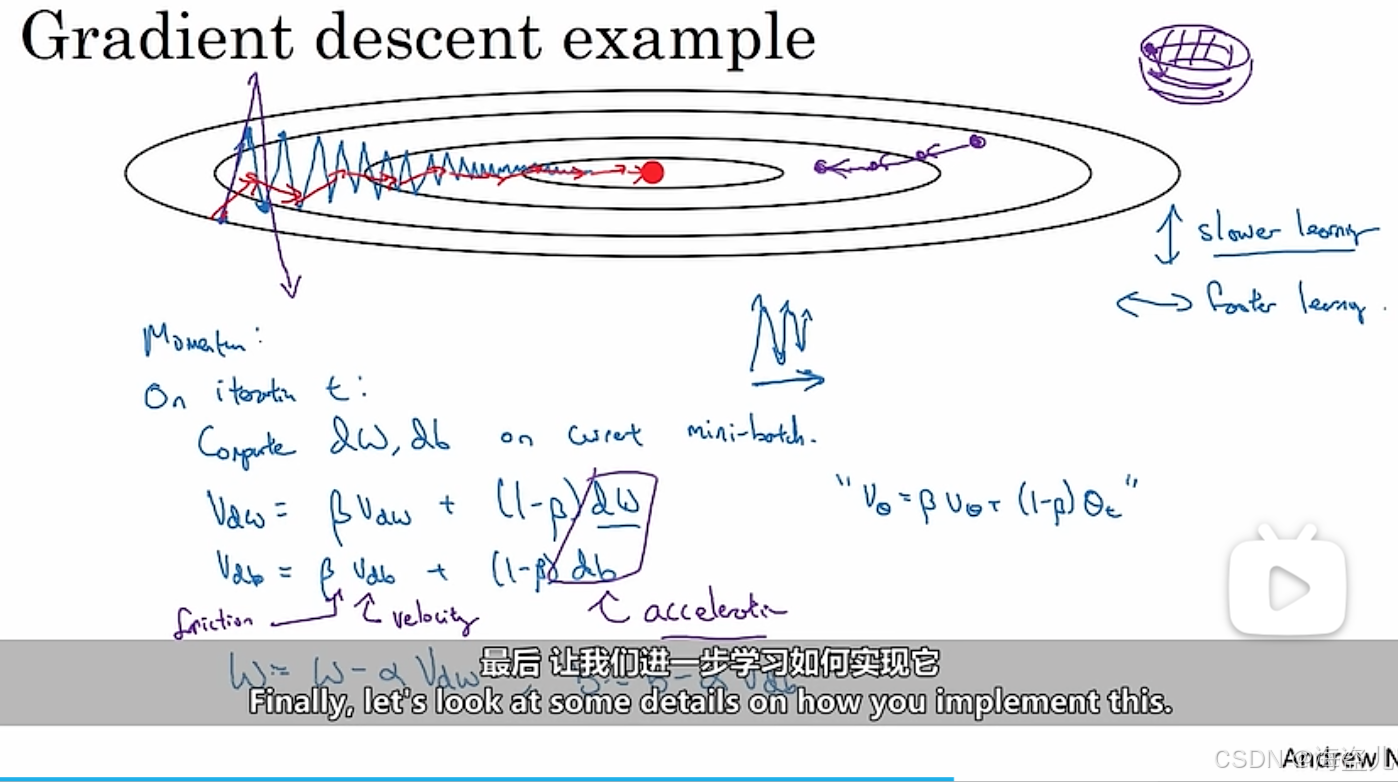
不使用 Momentum 的话,每次参数更新的方向可能变化幅度较大,如上图中的蓝线所示。而使用 Momentum 后,每次参数的更新方向都会在之前的方向上稍作修改,每次的更新方向会更加平缓一点,如上图的红线所示。这样,梯度下降算法可以更快地找到最低点。
在实现时,我们不用去使用偏差矫正。取0.9在大多数情况下都适用,有余力的话这个参数也可以调一下。
2.4 RMSProp 和 Adam
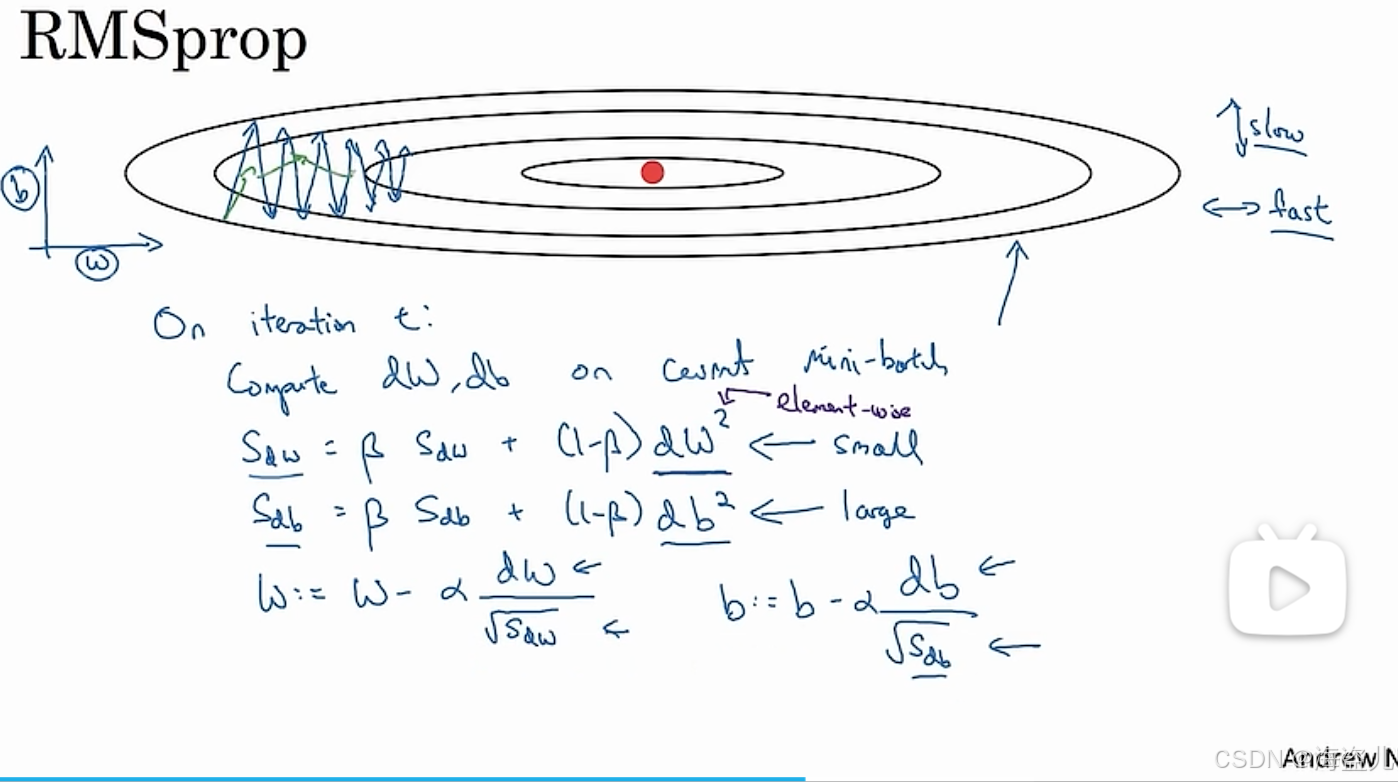
与 Momentum 类似,RMSProp(Root Mean Squared Propagation) 使用了某种移动平均值来平滑梯度的更新。其梯度下降公式如下:

在编程实现时,我们应该给分母加一个极小值,防止分母出现0。
Adam (Adaptive Moment Estimation) 是 Momentum 与 RMSProp 的结合版。为了使用Adam,我们要先计算 Momentum 和 RMSProp 的中间变量:

之后,根据前面的偏差矫正,获得这几个变量的矫正值:
如前文所述,在实现时添加偏差矫正意义不大。估计这里加上偏差矫正是因为原论文加了。


和之前一样,这里的是一个极小值。在编程时添加,一般都是为了防止分母中出现0。
Adam是目前非常流行的优化算法,它的表现通常都很优秀。为了用好这个优化算法,我们要知道它的超参数该怎么调。在原论文中,这个算法的超参数取值如下:
绝大多数情况下,我们不用手动调这三个超参数。
2.5 学习率衰减
训练时的学习率不应该是一成不变的。在优化刚开始时,参数离最优值还差很远,选较大的学习率能加快学习速度。但是,经过了一段时间的学习后,参数离最优值已经比较近了。这时,较大的学习率可能会让参数错过最优值。因此,在训练一段时间后,减小学习率往往能够加快网络的收敛速度。这种训练一段时间后减小学习率的方法叫做学习率衰减。
其实学习率衰减只是一种比较宏观的训练策略,并没有绝对正确的学习率衰减方法。我们可以设置初始学习率,之后按下面的公式进行学习率衰减:
这个公式非常简单,初始学习率会随着一个衰减率(DecayRate)和训练次数(EpochNum)衰减。
同样,我们还可以使用指数衰减:
或者其他一些奇奇怪怪的衰减方法(k是超参数):
甚至我们可以手动调学习率,每训练一段时间就把学习率调整成一个更小的常数。
总之,学习率衰减是一条启发性的规则。我们可以有意识地在训练中后期调小学习率。
2.6 局部最优值
在执行梯度下降算法时,局部最优值可能会影响算法的表现:在局部最优值处,各个参数的导数都是0。梯度是0(所有导数为0),意味着梯度下降法将不再更新了。
在待优化参数较少时,陷入局部最优值是一种比较常见的情况。而对于参数量巨大的深度学习项目来说,整个模型陷入局部最优值是一个几乎不可能发生的事情。某参数在梯度为0时,既有可能是局部最优值,也可能是局部最差值。不妨设两种情况的概率都是0.5。如果整个模型都陷入了局部最优值,那么所有参数都得处于局部最优值上。假设我们的深度学习模型有10000个参数,则一个梯度为0的点是局部最优值的概率是,这是一个几乎不可能发生的事件。
所以,在深度学习中,更常见的梯度为0的点是鞍点(某处梯度为0,但不是局部最值)。在鞍点处,有很多参数都处于局部最差值上,只要稍微对这些参数做一些扰动,参数就会往更小的方向移动。因此,鞍点不会对学习算法产生影响。
在深度学习中,一种会影响学习速度的情况叫做“高原”(plateau)。在高原处,梯度的值一直都很小。只有跨过了这段区域,学习的速度才会快起来。这种情况的可视化结果如下
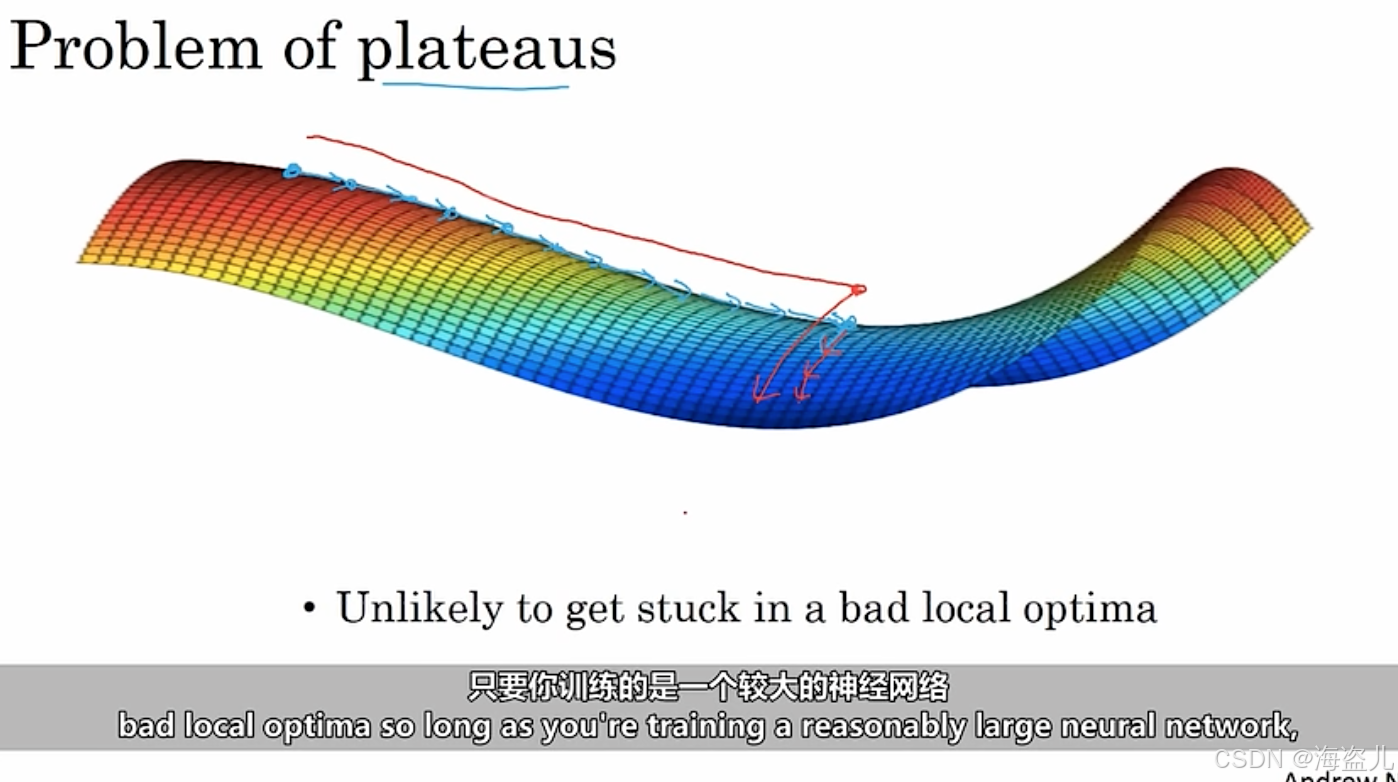
总而言之,深度学习问题和简单的优化问题不太一样,不用过多担心局部最优值的问题。而高原现象确实会影响学习的速度。
总结
这周,我们围绕深度学习的优化算法,学习了许多提升梯度下降法性能的技术。让我们来捋一捋。
首先,我们可以在处理完一小批数据后就执行梯度下降,而不必等处理完整个数据集后再执行。这种算法叫分批梯度下降(mini-batch gradient descent)。这是一种对梯度下降法的通用改进方法,即默认情况下,这种算法都可以和其他改进方法同时使用。
之后,我们学习了移动平均的概念,知道移动平均值可以更平滑地反映数据在一段时间内的趋势。基于移动平均值,有 gradient descent with momentum 和 RMSProp 这两种梯度下降的改进方法。而现在非常常用的 Adam 优化算法是Momentum 和 RMSProp 的结合版。
最后,我们学习了学习率衰减的一些常见方法。
学完本课的内容后,我认为我们应该对相关知识达到下面的掌握程度:
- 分批梯度下降
- 了解原理
- 掌握如何选取合适的 batch size
- 高级优化算法
- 了解移动平均数的思想
- 了解 Adam 的公式
- 记住 Adam 超参数的常见取值
- 未来学习了编程框架后,会调用 Momentum,Adam 优化器
- 学习率衰减
- 掌握“学习率衰减能加速收敛”这一概念
- 在训练自己的模型时,能够有意识地去调小学习率
- 局部最优值
- 不用管这个问题
三. 调参、批归一化、多分类任务、编程框架
这周的知识点也十分分散,主要包含四项内容:调参、批归一化、多分类任务、编程框架。
通过在之前的编程项目里调整学习率,我们能够体会到超参数对模型效果的重要影响。实际上,选择超参数不是一个撞运气的过程。我们应该有一套系统的方法来快速找到合适的超参数。
两周前,我们学习了输入归一化。类似地,如果对网络的每一层都使用归一化,也能提升网络的整体表现。这样一种常用的归一化方法叫做批归一化。
之前,我们一直都在讨论二分类问题。而只要稍微修改一下网络结构和激活函数,我们就能把二分类问题的算法拓展到多分类问题上。
为了提升编程的效率,从这周开始,我们要学习深度学习编程框架。编程框架往往能够帮助我们完成求导的功能,我们可以把精力集中在编写模型的正向传播上。
3.1 调参
调参的英文动词叫做tune,这个单词作动词时大部分情况下是指调音。这样一看,把调参叫做“调整参数”或“调试参数”都显得很“粗鲁”。理想情况下,调参应该是一个系统性的过程,就像你去给乐器调音一样。乱调可是行不通的。
3.11 超参数优先级
回顾一下,我们接触过的超参数有:
- 学习率
- momentum
- adam
- 隐藏层神经元数
- 层数
- 学习率递减率
- mini-batch size
其中,优先级最高的是学习率。吴恩达老师建议大家调完学习率后,再去调、隐藏层神经元数、mini-batch size。如果使用adam,则它的三个参数基本不用调。
3.12 超参数采样策略
在尝试各种超参数时,不要按“网格”选参数(如下图左半所示),最好随机选参数(如下图右半所示):
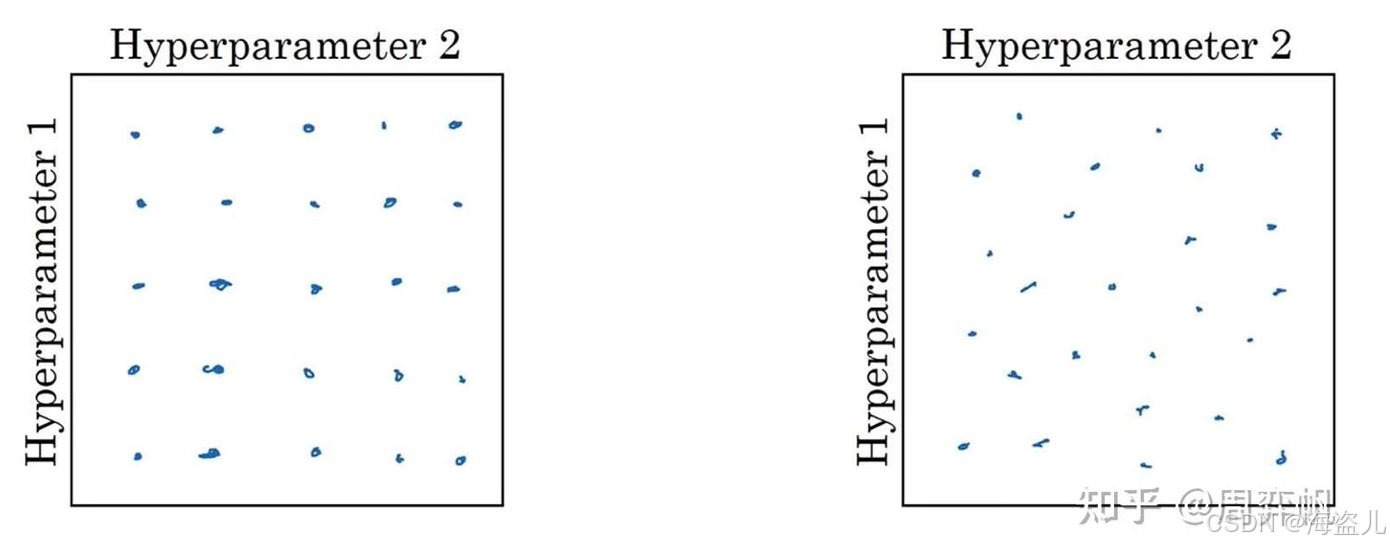
如果用网格采样法的话,你可能试了25组参数,每个参数只试了5个不同的值。而实际上,你试的两个参数中只有一个参数对结果的影响较大,另一个参数几乎不影响结果。最终,你尝试的25次中只有5次是有效的。
而采用随机采样法试参数的话,你能保证每个参数在每次尝试时都取不同值。这样试参数的效率会更高一点。
另外,调参时还有一个“由粗至精”的过程。如下图所示:
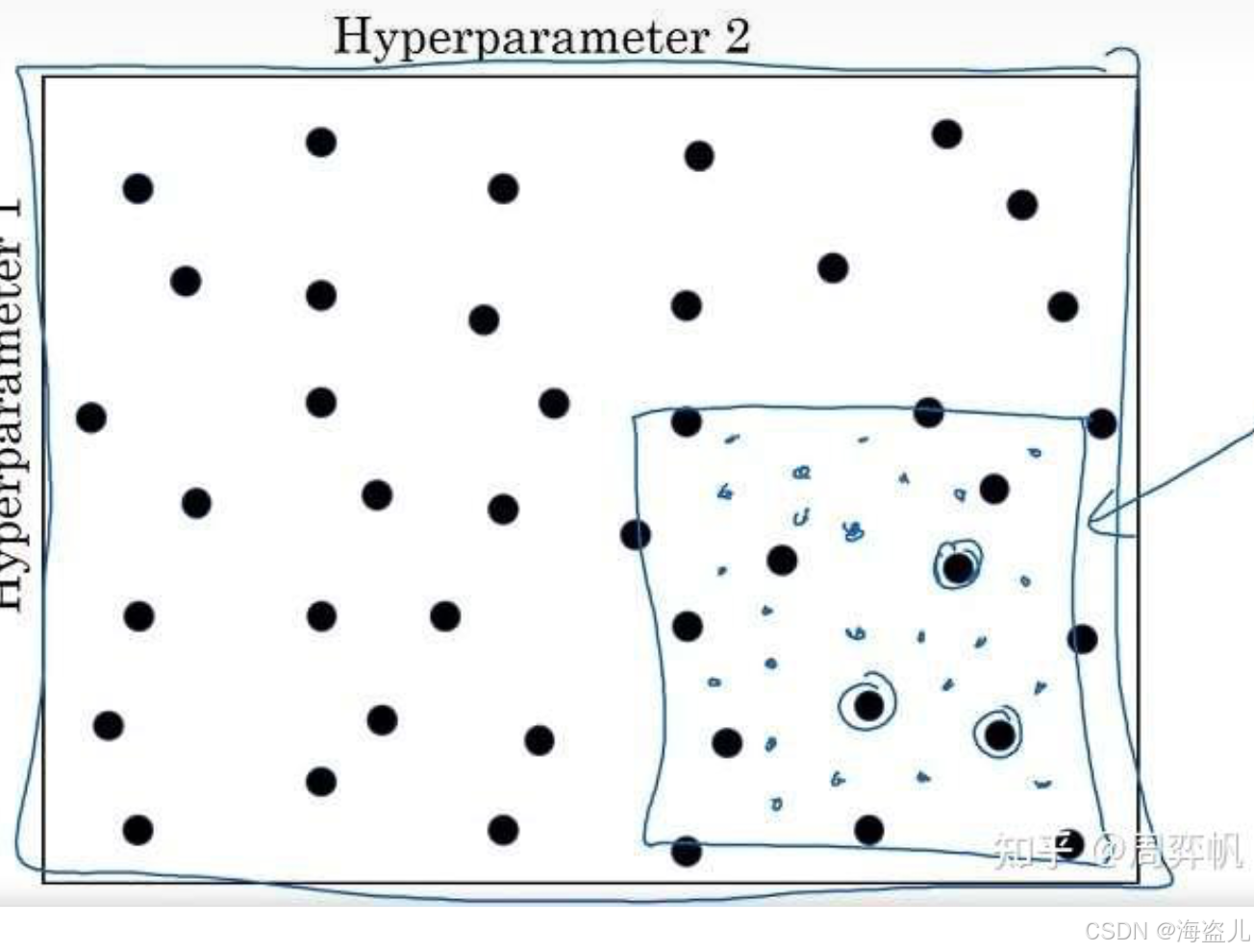
当我们发现某几个参数的结果比较优秀时,我们可以缩小搜索范围,仅在这几个参数附近进行搜索。
3.13超参数搜索尺度
搜索参数时,要注意搜索的尺度。如果搜索的尺度不够恰当,我们大部分的调参尝试可能都是无用功。
比如当搜索学习率时,我们应该按0.0001, 0.001, 0.01, 0.1, 1这样指数增长的方式去搜索,而不应该按0.2, 0.4, 0.6, 0.8, 1这种均匀采样的方式搜索。这是因为学习率是以乘法形式参与计算,取0.4, 0.6, 0.8得到的结果可能差不多,按这种方式采样的话,大部分的尝试都是浪费的。而以0.001, 0.01, 0.1这种方式取学习率的话,每次的运行结果就会差距较大,每次尝试都是有意义的。
除了搜索学习率时用到的指数采样,还有其他的采样方式。让我们看调整momentum项的情况。回忆一下,取0.9,表示近10项的平均数;
取0.99,表示近100项的平均数。也就是说,
表示
项的平均数。我们可以对
进行指数均匀采样。
当然,有些参数是可以均匀采样的。比如隐藏层的个数,我们可以从[2, 3, 4]里面挑一个;比如每个隐藏层的神经元数,我们也可以直接均匀采样。
总结一下,我们在搜索超参数的时候,应该从超参数所产生的影响出发,考虑应该在哪个指标上均匀采样,再反推超参数的采样公式,而不一定要对超参数本身均匀采样。
当然了,如果我们不确定应该从哪个尺度对超参数采样,可以先默认使用均匀采样。因为我们会遵循由粗至精的搜索原则,尝试几轮后我们就能够观察出超参数的取值规律,从而在正确的尺度上对超参数进行搜索。
3.2 批归一化(Batch Normalization)
在第五篇笔记中,我们曾学习了输入归一化。其计算公式如下:
通过归一化,神经网络第一层的输入更加规整,模型的训练速度能得到有效提升。
我们知道,神经网络的输入可以看成是第零层(输入层)的激活输出。一个很自然的想法是:我们能不能把神经网络每一个隐藏层的激活输出也进行归一化,让神经网络更深的隐藏层也能享受到归一化的加速?
批归一化(Batch Normalization)就是这样一种归一化神经网络每一个隐藏层输出的算法。准确来说,我们归一化的对象不是每一层的激活输出,而是激活前的计算结果
。让我们看看对于某一层的激活前输出
,我们该怎么进行批归一化。
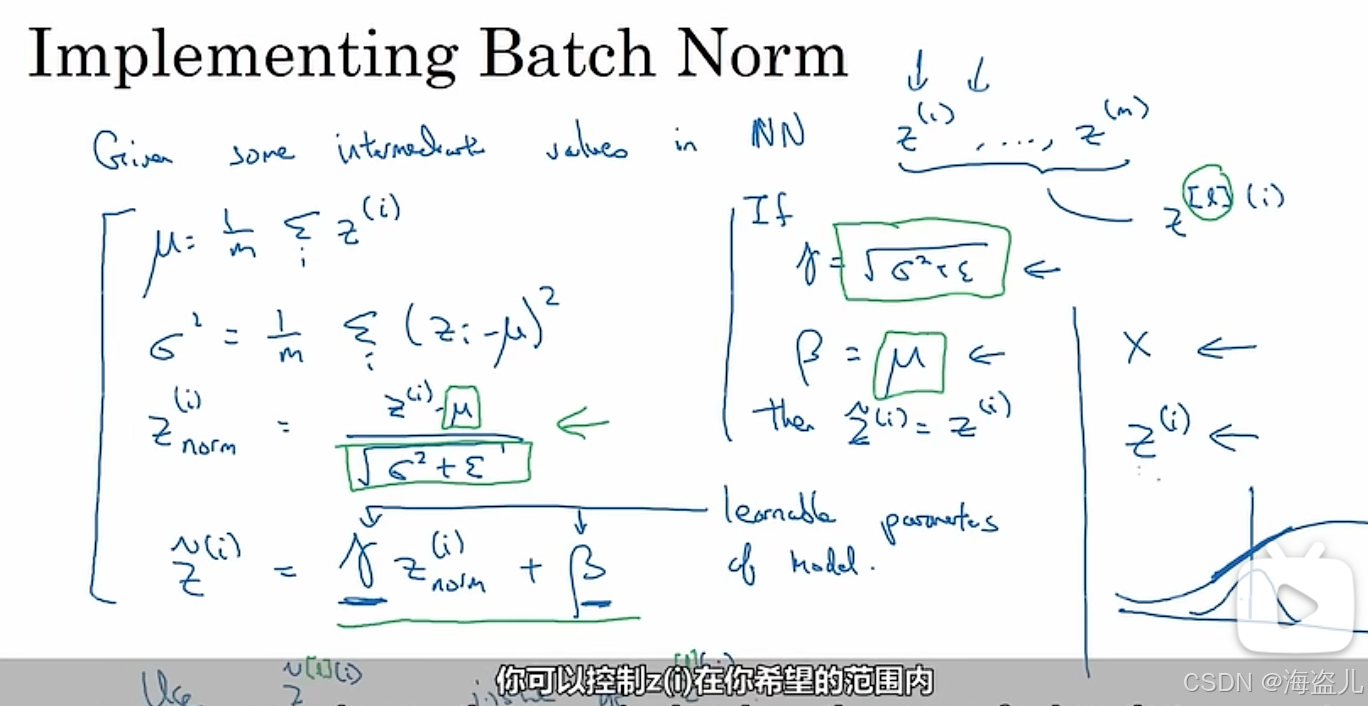
首先,还是先获取符合标准正态分布的归一化结果:
我们不希望每一层的输出都固定为标准正态分布,而是希望网络能够自己选择最恰当的分布。因此,我们可以用下式计算最终的批归一化结果:
其中是最终的批归一化结果,
都是可学习参数,分别影响新分布的方差与均值。
为什么我们不希望数据的分布总是标准正态分布呢?可以考察一个即将送入sigmoid的。sigmoid在[-1, 1]这段区间内近乎是一个线性函数,为了利用该激活函数的非线性区域,我们应该让z的取值范围更大一点,即让z的方差大于1。
这里的和梯度下降算法里的
不是同一回事,只是这几个算法的原论文里都使用了这个符号。
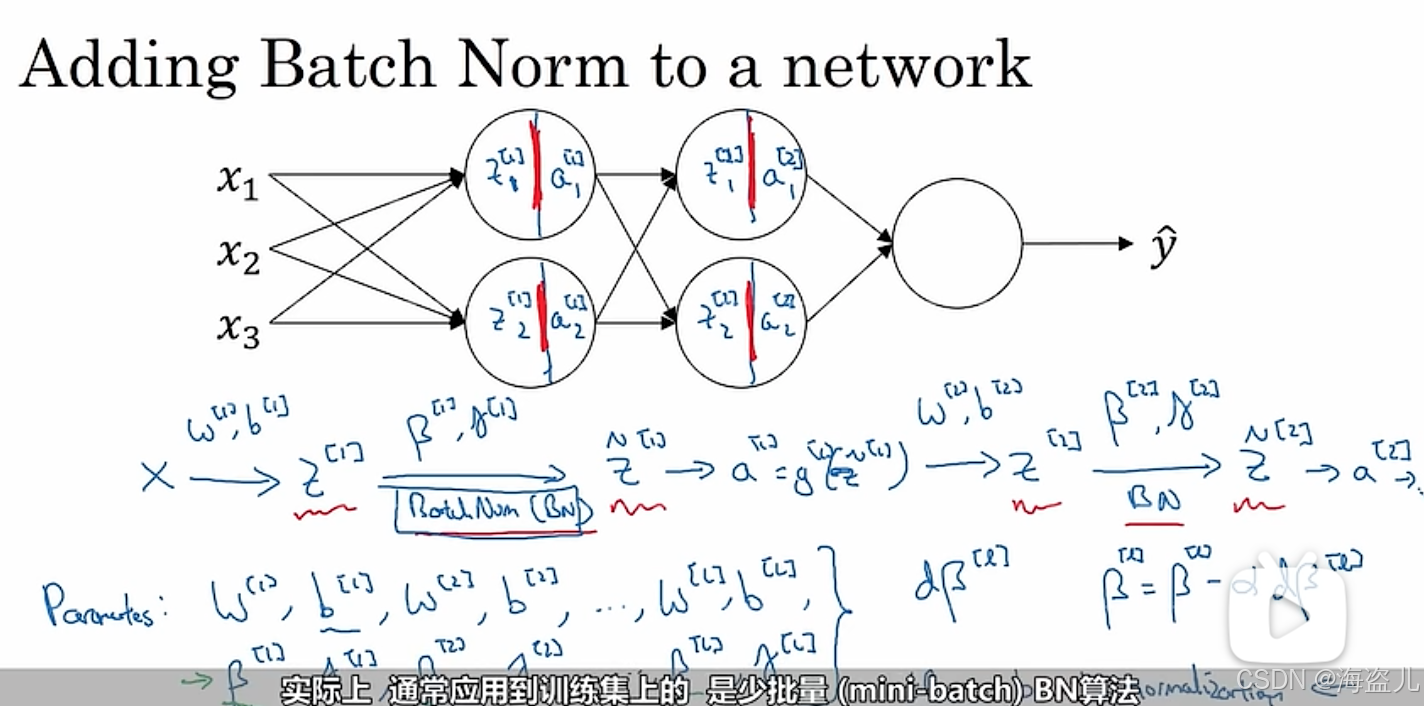
使用批归一化后,原来的神经网络计算公式需要做出一些调整。之前,的计算公式如下:
现在,我们会把的均值归一化到0。因此,+b成为了一个冗余的操作。使用了批归一化后,应该按下面的方法计算:
总结一下,加入批归一化后,神经网络的计算过程如下所示:
注意,使用向量化计算后,
其中 和
的形状都是
求导公式:
使用批归一化后,常见优化算法(mini-batch, momentum, adam, ...)仍能照常使用。
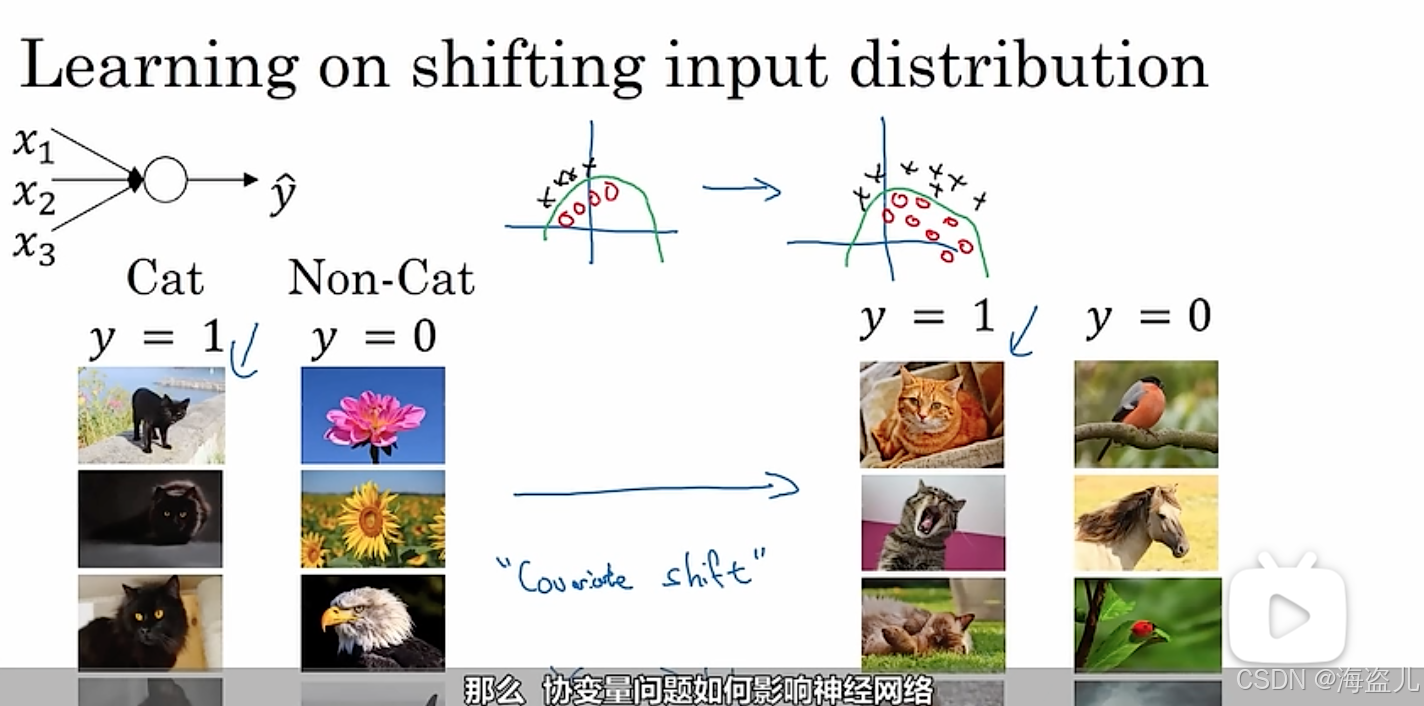
3.22直观理解批归一化的作用
对于神经网络中较深的层,它们只能“看到”来自上一层的激活输出,而不知道较浅的层的存在。如下图所示,对于第3层,它只知道第2层的激活输出。
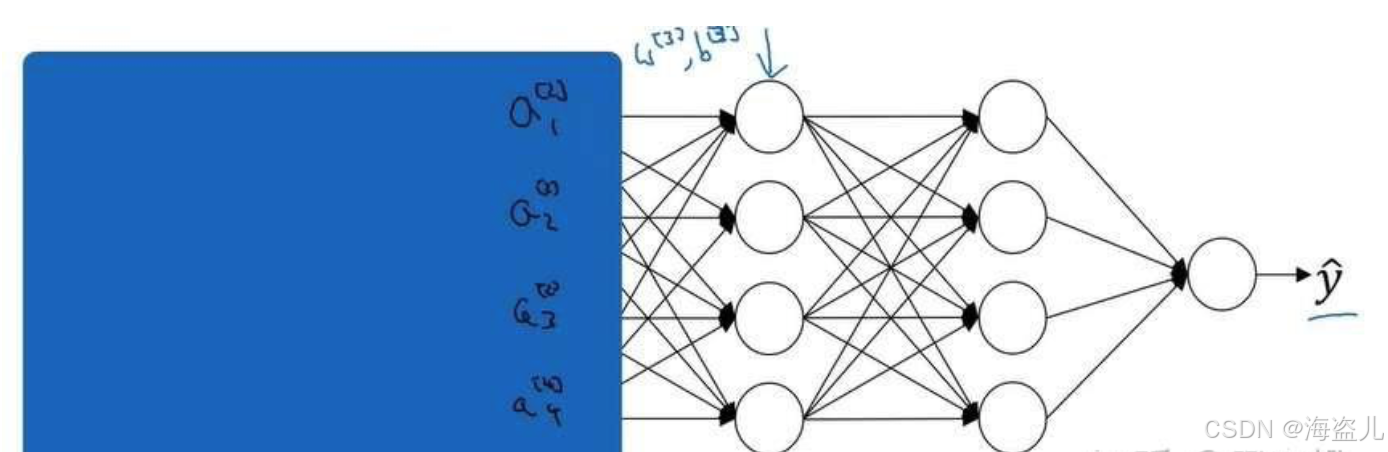
这样,经过一段时间的训练后,网络的第3层和第4层知道了如何较好地把映射成
。
可是,并不是神经网络的真实输入。神经网络真正的结构如下:
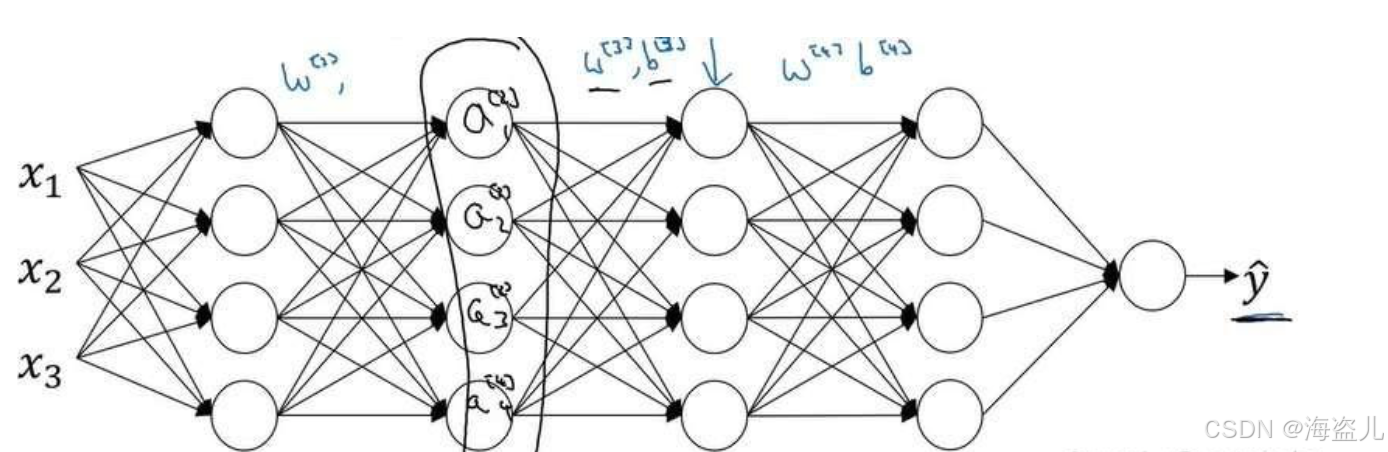
其实还受到神经网络前2层参数的影响。一旦前2层的参数更新,
的分布也会随之改变,第3层和第4层可能要从头学习
到
的映射关系。
与之相比,使用了批归一化后,神经网络每一层的输出都会落在一个类似的分布里。这样,浅层和深层之间就没有那么强的依赖关系,较深的层能够更快完成学习。
顺带一提,当我们用批归一化的同时,如果还使用了mini-batch,则批归一化还能稍微起到一点正则化的作用。这是因为在mini-batch上每层批归一化用到的方差和均值是不准确的,这种“带噪音”的批归一化能够起到和dropout类似的作用,防止神经网络以较大的权重依赖于少数神经元。
3.23测试时的批归一化
我们刚刚学习的批归一化操作,其实都是针对训练而言的。在训练时,我们有大批的数据,可以轻松算出每一层中间结果的均值和方差。但是,在测试时,我们可能只会对一项输入进行计算。对一项输入计算均值和方差是没有意义的。因此,我们要想办法决定测试时
用到的均值和方差。
我们可以用每一个mini-batch的均值和方差的指数加权移动平均数作为测试时的均值和方差。
3.3 Softmax 与多分类问题
之前我们一直都在讨论二分类问题。比如,辨别一张图片是不是小猫。当我们把二分类问题拓展到多分类问题时,问题的数学模型会发生哪些变化呢?
首先,我们来看一下多分类问题的定义。在多分类问题中,我们要要判断一个输入是属于C种类型中的哪一种。比如我们希望判断一张图片里的生物是属于小猫、小狗、小鸡、其他这C=4类中的哪一种。
在二分类问题中,我们用1表示“是某一类”,0表示“不是某一类”。我们只需要计算这一个概率。而多分类问题中,我们用一个数字表示一种类别,比如0表示“其他”,1表示“小猫”,2表示“小狗”,3表示“小鸡”。这样,我们就应该计算多个概率,比如这四个概率。
,
,
,
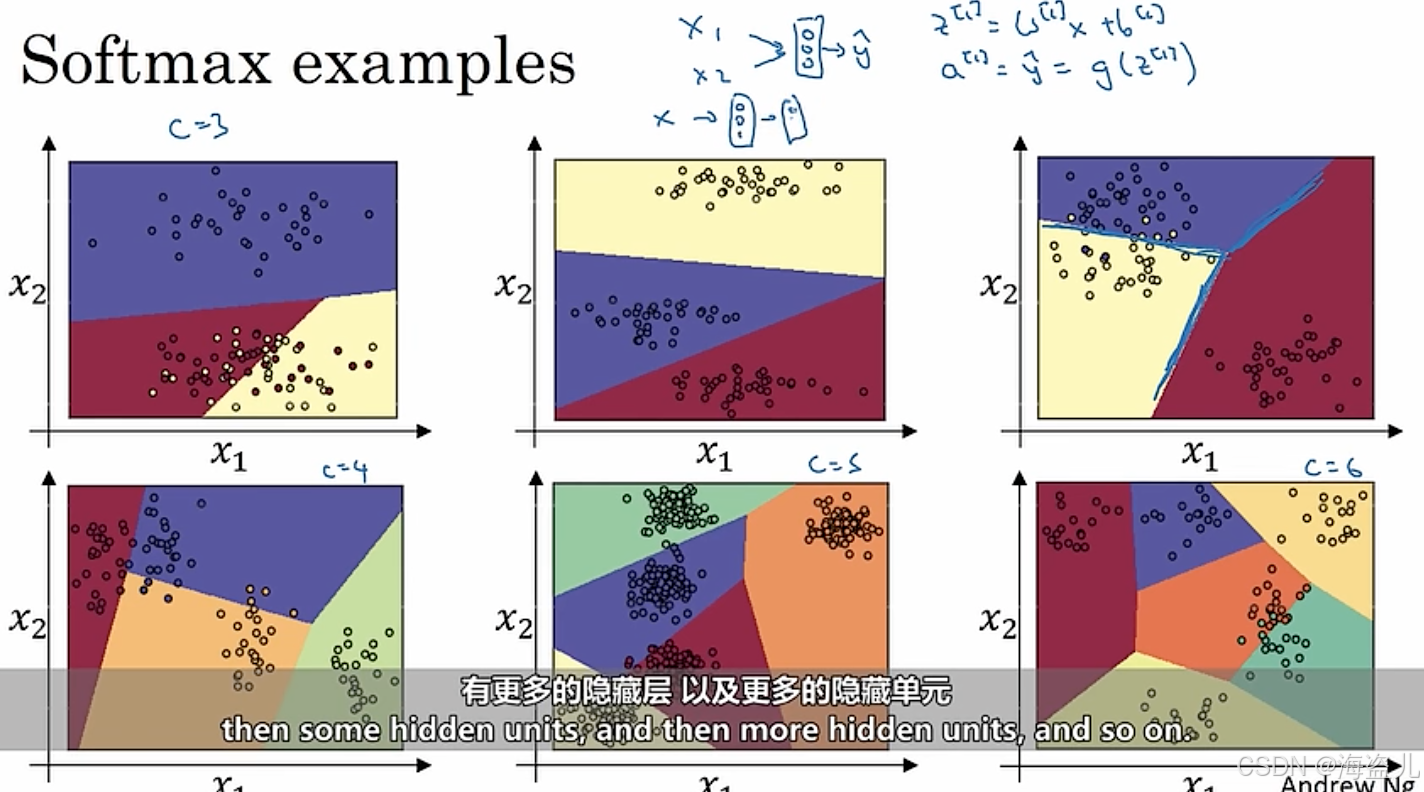
多分类问题的示意图和一个可能的多分类神经网络如下图所示(注意,该网络有4个输出):
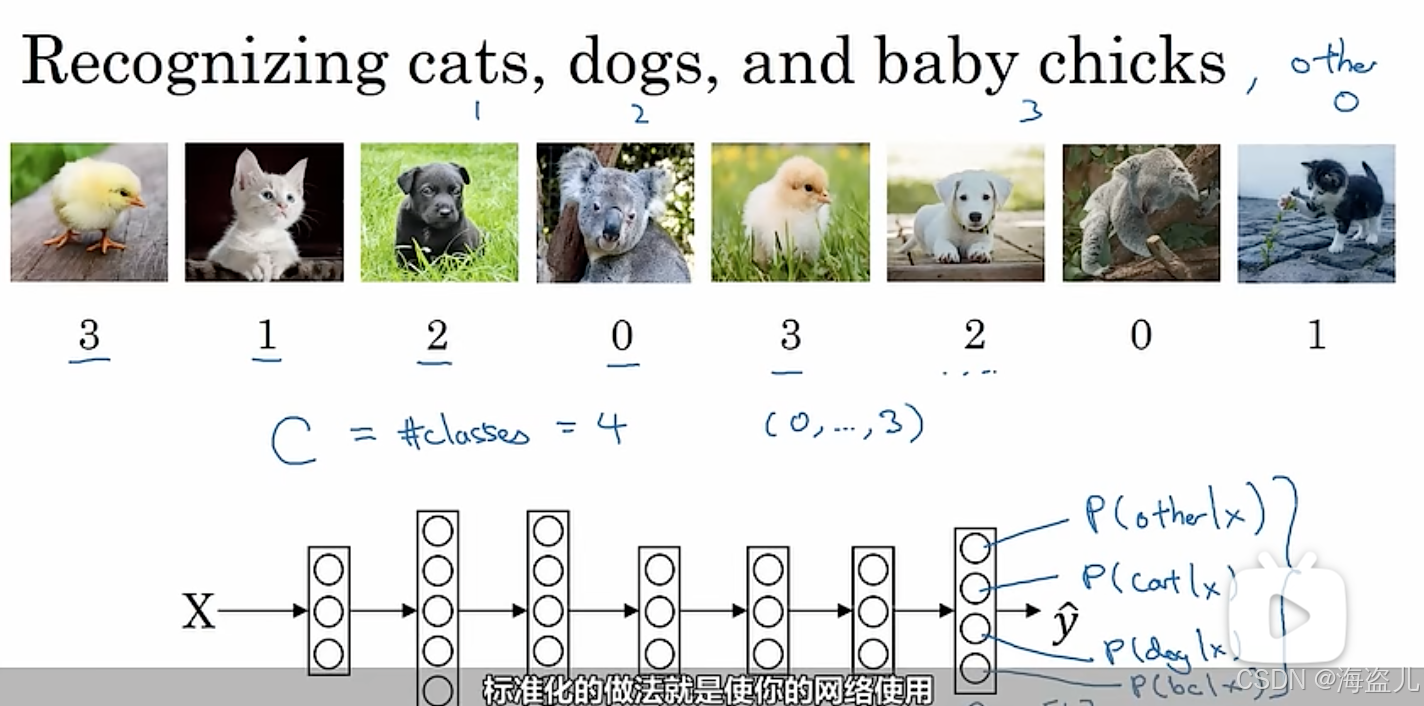
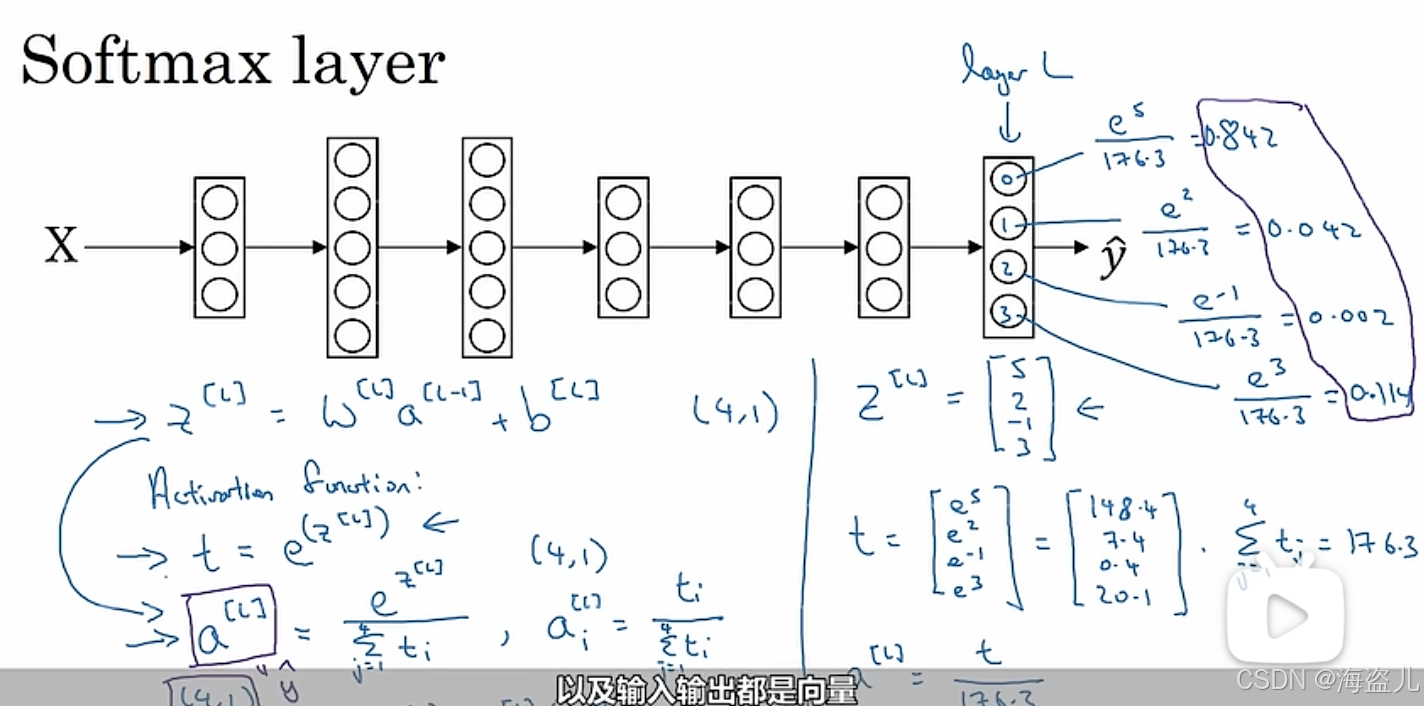
接着,我们来看看多分类问题带来了哪些新的困难。在二分类问题中,我们得到了最后一层的计算结果,我们要用sigmoid把它映射到表示概率的[0, 1]上。而多分类问题中,同理,我们要把神经网络最后一层的计算结果
映射成一些有实际意义的概率值。具体而言,我们应让所有分类概率之和为1,即
。为了达到这个目的,我们要引入一个激活函数——softmax。
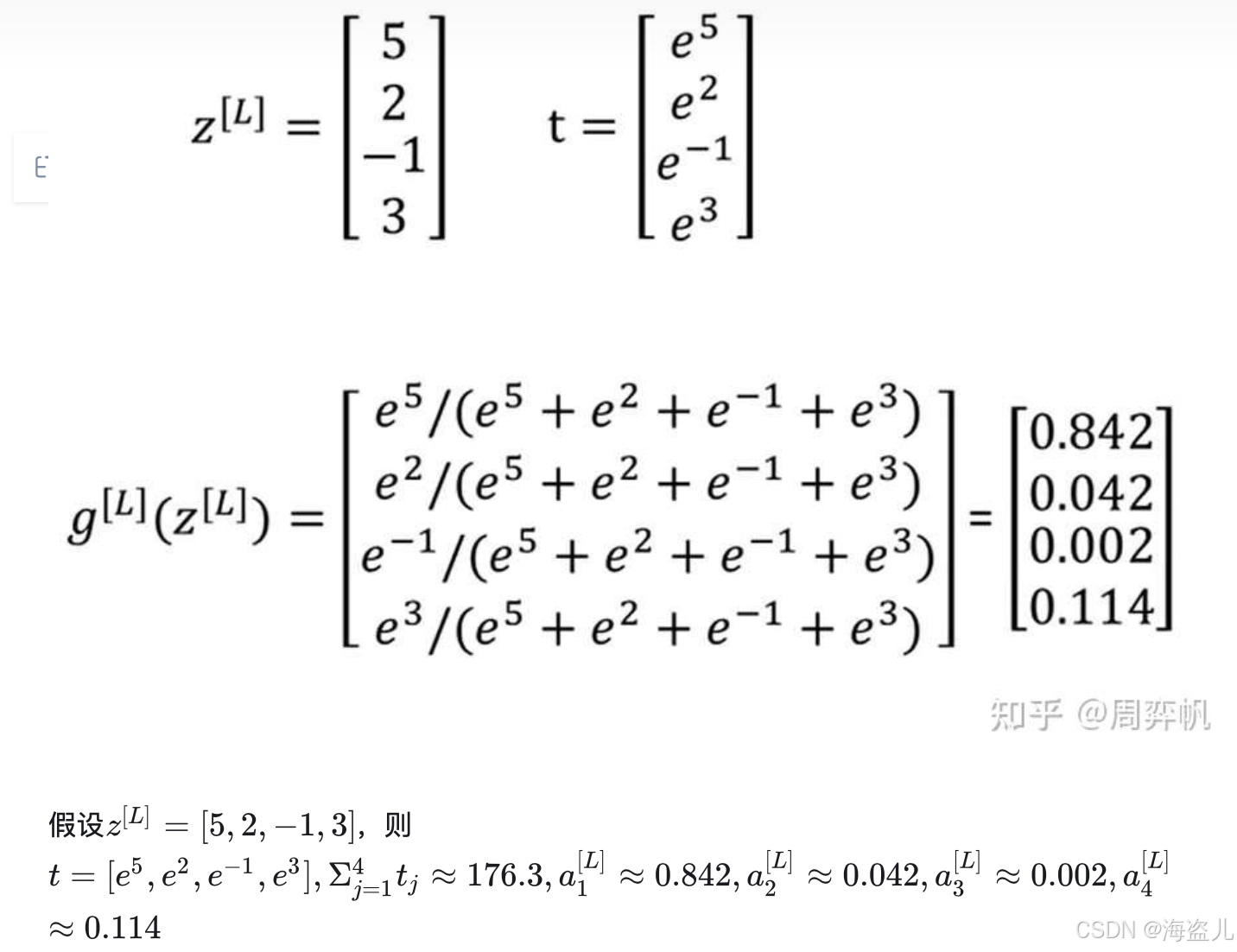
和其他定义在一个实数上的激活函数不同,softmax定义在一个向量上,其计算方式为:
注意,上式中所有运算都是逐元素运算。比如在上面提到的有四个类别的分类问题中,是一个形状为
的张量,经过逐元素运算后,
都是形状为
的张量.
为什么要使用向量每个分量的自然指数作为归一化的变量,而不直接对原向量做标准归一化呢?可以考虑[1, 2], [10, 20]这两个向量。如果直接对这两个量进行进行归一化,算出来的概率都是[0.33, 0.67]。而实际上,第一个向量可能对应一幅比较模糊的输入,第二个向量可能对应一幅比较清楚的输入。显然,在更清晰的输入上,我们更有把握说我们的分类结果是正确的。通过使用softmax,我们可以放大数值的影响,[10, 20]相比[1, 2],我们更有把握说输入是属于第二个类别的。
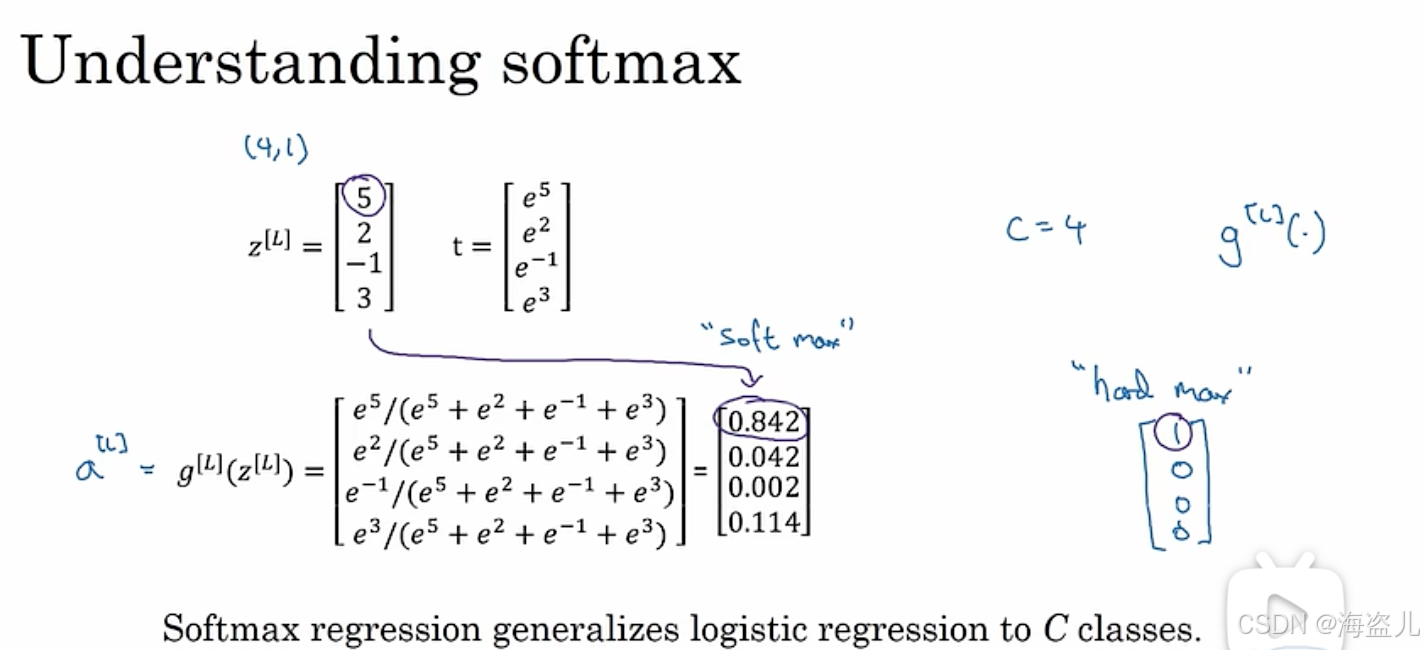
在C=2时,softmax会退化成sigmoid。也就是说,softmax是sigmoid在多分类任务上的推广。
softmax这个名字,其实衍生自hardmax这个词。使用hardmax时,输入会被映射成[1, 0, 0, 0]这样一个one-hot向量。这种最大值太严格(hard)了,所以有相对来说比较宽松(soft)的最大值计算方法softmax。
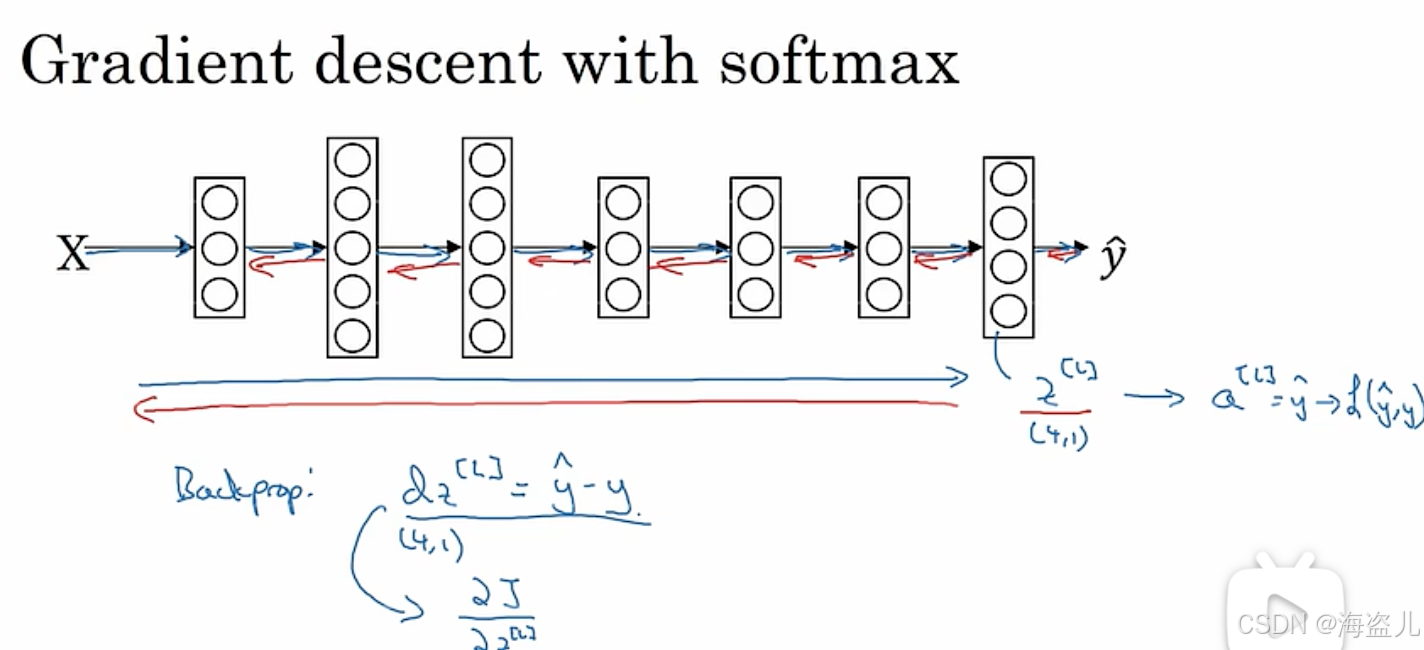
使用了softmax后,还需要调整的是网络的loss。推广到多分类后,我们要使用的loss是
其中 不是一个表示类别的整数,而是一个one-hot编码的向量。比如在一共有4类时,标签2的one-hot编码是:
假设整个标签数据集为 ,则参与网络运算时用到的Y 应该是:
在编程时,数据集一般只会提供用整数表示的标签。为了正确使用loss,我们需要多加一步转换到one-hot编码的步骤。
和逻辑回归类似,计算梯度时,这个等式依然成立,我们可以用它跳一个算梯度的步骤。
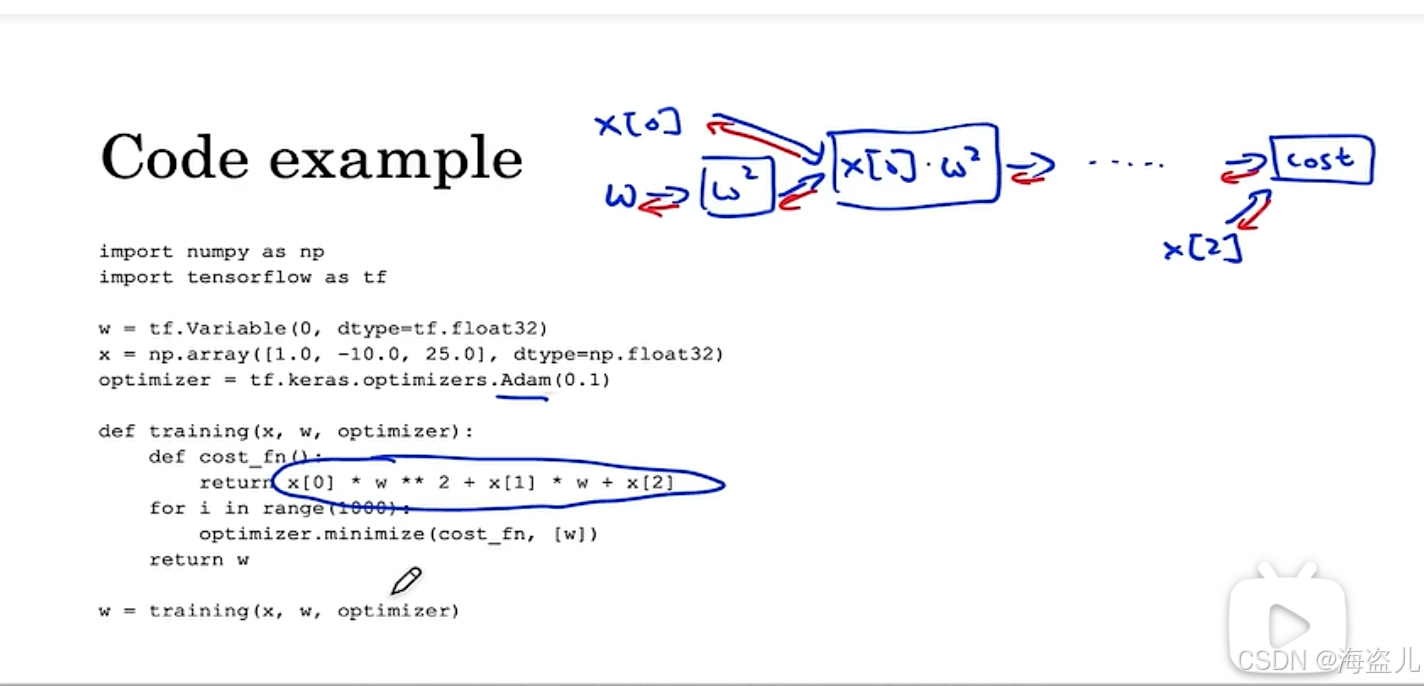
四.编程框架
这些编程框架不仅封装了常见的深度学习数学函数,如sigmoid、softmax、卷积,还支持自动求导的功能——这是深度学习编程框架最吸引人的一点。在使用编程框架时,我们只需要编写前向传播的过程,框架就会自动执行梯度计算,以辅助我们完成反向传播。
在选择编程框架时,我们要考虑以下几点:
- 易用性(能否快速开发与部署)
- 运行性能
- 是否真正开源
前两点注意事项毋庸置疑。框架之于编程语言,就像高级语言之于汇编语言一样。我们选择编程框架而不去从零编程,最主要的原因就是开发效率。使用框架能够节约大量的开发时间,有助于项目的迭代。而使用统一的框架,往往会损失一些效率,这些损失的效率不能太多。
第三点要着重强调一下。很多框架打着开源的名号,实际上却是某个公司在维护。如果这个公司哪天不想维护了,放弃继续开源,那么你的开发就会受到很大的影响。
总结
这堂课的知识点有:
- 调参
- 优先级
- 采样策略
- 搜索尺度
- 批归一化
- 在网络中的位置
- 作用(归一化、新分布)
- 超参数与公式
- 测试时的处理方式
- 多分类问题
- softmax
- loss

















 1736
1736

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









