









Hyperspectral unmixing阅读笔记---整理中
最近更改了课题,主要在进行Hyperspectral unmixing的研究。 本文会在发布的同时不断更新完善,希望各位看到的朋友帮助我指出错误。文中有很多地方的用词是英文,其原因是笔者是根据英文文献学习,担心不能使用准确的中文名词而导致误解,若有不变还望见谅。
为什么搞Hyperspectral unmixing?
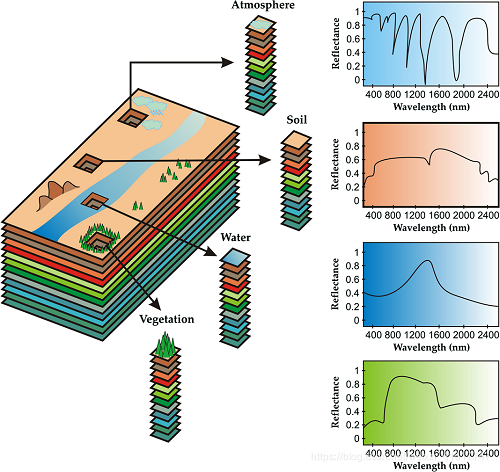
对于Hyperspectral unmixing (HU)的研究,归根结底是源自于Hyperspectral imagery(高光谱, HSI) 的发展。Hyperspectral image 被广泛应用于各个领域,如遥感,农业,矿业等。
图片来自
在上图中,最左侧的长方体代表着观测到的HSI。HSI 可以同时提供频谱和空间信息,从上图中可以看到HSI 分为许多层,每一个层面都代表着不同光谱下的空间信息。上图中箭头所指即为,从HSI 中选取出不同材质的的光谱特征向量(这一操作成立的前提是后文中描述的pure pixel存在)。但由于HSI 的空间解析度有限, 通常,单个像素可以达到现实中的4m × \times × 4m到20m × \times × 20m。因此每一个像素中通常包含多种材料的光谱辐射。为了更好的的实现HSI 分析, Hyperspectral unmixing必不可少。
线性混合模型 Mixture model
前面提到HSI 存在于多种材料信息混合的情况, 为了解决这个问题, 需要建立一个HSI的混合模型以便于进行分解。混合模型可以分为线性混合和非线性混合两种。在实际情况中,非线性更加贴近真实情况,然而线性混合模型(linear mixture model,LMM)虽然简单,但非常具有代表性,许多情况中都可以作为可接受的模型使用。本文所提到的大多数算法都是基于LMM而提出的。 线性模型可以表示为:
y
[
n
]
=
∑
i
=
1
N
a
i
s
i
[
n
]
+
v
[
n
]
=
A
s
[
n
]
+
v
[
n
]
{\bf{y}}[n] = \sum_{i = 1}^{N}{\bf{a}}_{i}s_{i}[n] + {\bf{v}}[n] = {\bf{A}}{\bf{s}}[n] + {\bf{v}}[n]
y[n]=i=1∑Naisi[n]+v[n]=As[n]+v[n]
其中的A矩阵可以称为端元矩阵(endmember matrix),
y
[
n
]
y[n]
y[n]是位于像素n处的高光谱观测值。
a
i
{\bf {a}_{i}}
ai被称为端元特征向量(endmember signature vector),
s
i
[
n
]
s_{i}[n]
si[n] 表示材料i在像素n处的contribution(贡献值)或proportion(占比),
s
[
n
]
s[n]
s[n] 被称为丰度向量。 对于丰度向量有着一定的约束,即非负以及和为1:
s
i
[
n
]
≥
0
,
i
=
1
,
.
.
.
,
N
,
a
n
d
∑
i
=
1
N
s
i
[
n
]
=
1
s_{i}[n] \geq 0, ~ i =1,...,N,~and ~ \sum_{i=1}^{N}s_{i}[n] = 1
si[n]≥0, i=1,...,N, and i=1∑Nsi[n]=1
已知观测值
y
[
n
]
y[n]
y[n], 假设对于端元矩阵
A
A
A我们有充足的信息,并且假设矩阵A为列满秩, 则实现unmixing就可以通过求解LS 问题:
s
^
[
n
]
=
a
r
g
min
s
[
n
]
∈
S
∥
y
[
n
]
−
A
s
[
n
]
∥
2
2
z
\hat{s}[n] = arg~\min_{s[n]\in \mathcal{S}}\|y[n] - As[n]\|_{2}^{2}z
s^[n]=arg s[n]∈Smin∥y[n]−As[n]∥22z
where n = 1,2,…,L
基于LMM的经典解混思路
pure pixel 模型
一种较为特殊的情况是 pure pixel模型。这种情况指某一pixel中的成分只包含一种材料。即:
s
[
l
i
]
=
e
i
s[\mathcal{l}_{i}] = e_{i}
s[li]=ei
这里的
e
i
e_{i}
ei是一个单位向量仅在第
i
i
i处的元素为非零。上式表示,材料
i
i
i在此处所占的比例为1,即该像素处仅包含单一的材料(endmember)。也可以写为:
y
[
l
i
]
=
a
i
\bf{y}[\mathcal{l}_{i}] = \bf{a}_{i}
y[li]=ai
在Wing-kin Ma的文章中,只要每一个endmember都存在一个pure pixel,就认为该模型是成立的。下文中提出用一个简单的方法实现为所有endmembers寻找他们的pure pixel。
Hyperspectral unmixing algorithm
高光谱的解混算法有很多种,在本节中会分情况讨论不同的算法。
Algorithm for pure pixel
如上文中所提到,不考虑噪声项,并考虑pure pixel假设成立。由于pure pixel 对应的位置并不事先知道,因此一个经典的思路是使用successive projections algrithm(SPA)。有前面的线性混合模型可以得到:
∥
y
[
n
]
∥
2
=
∥
∑
i
=
1
N
s
i
[
n
]
a
i
∥
2
\|{\bf{y}}[n]\|_{2} = \|\sum_{i=1}^{N}s_{i}[n]{\bf{a}}_{i}\|_{2}
∥y[n]∥2=∥i=1∑Nsi[n]ai∥2
根据三角不等式定理:
∥
∑
i
=
1
N
s
i
[
n
]
a
i
∥
2
≤
∑
i
=
1
N
∥
s
i
[
n
]
a
i
∥
2
=
∑
i
=
1
N
s
i
[
n
]
∥
a
i
∥
2
\|\sum_{i=1}^{N}s_{i}[n]{\bf{a}}_{i}\|_{2}~\leq~ \sum_{i=1}^{N}\|s_{i}[n]{\bf{a}}_{i}\|_{2}~ = ~\sum_{i=1}^{N}s_{i}[n]\|{\bf{a}}_{i}\|_{2}
∥i=1∑Nsi[n]ai∥2 ≤ i=1∑N∥si[n]ai∥2 = i=1∑Nsi[n]∥ai∥2
由于对于s存在和为一的约束,因此:
∑
i
=
1
N
s
i
[
n
]
∥
a
i
∥
2
≤
max
i
=
1
,
2
,
.
.
.
∥
a
i
∥
2
\sum_{i=1}^{N}s_{i}[n]\|{\bf{a}}_{i}\|_{2}~\leq~\max_{i = 1,2,...}\|{\bf{a}_{i}}\|_{2}
i=1∑Nsi[n]∥ai∥2 ≤ i=1,2,...max∥ai∥2
上述不等式中的等于情况在
s
[
n
]
=
e
j
s[n] =e_{j}
s[n]=ej时成立,其中
j
=
a
r
g
max
i
=
1
,
.
.
.
,
N
∥
a
i
∥
2
j = arg~\max_{i = 1,...,N}\|{\bf{a}}_{i}\|_{2}
j=arg maxi=1,...,N∥ai∥2,
n
=
l
j
n = \mathcal{l}_{j}
n=lj。即
y
[
n
]
y[n]
y[n]是端元j(the j-th endmember)的pure pixel。
因此可以获得第一个端元特征:
a
^
1
=
y
[
l
^
i
]
,
l
^
i
=
a
r
g
max
n
=
1
,
.
.
.
,
L
∥
y
[
n
]
∥
2
2
\hat{a}_{1} = y[\hat{\mathcal{l}}_{i}],~ \hat{\mathcal{l}}_{i} = arg\max_{n = 1,...,L}\|y[n]\|_{2}^{2}
a^1=y[l^i], l^i=argn=1,...,Lmax∥y[n]∥22
这里的估计值在之前的设定情形下是一个极其完美的
a
1
a_{1}
a1估计值。
那么如何获得余下的端元的pure pixel?首先假设我们已经获得了
k
−
1
k-1
k−1个端元的特征,分别表示为
a
^
1
,
a
^
2
,
.
.
.
,
a
^
k
−
1
\hat{a}_{1},\hat{a}_{2},...,\hat{a}_{k-1}
a^1,a^2,...,a^k−1。使用nulling的方法实现寻找下一个端元。
根据已获得的endmember vector可以获得一个endmember matrix
A
^
1
:
k
−
1
=
[
a
^
1
,
a
^
2
,
.
.
.
,
a
^
k
−
1
]
\hat{A}_{1:k-1} = [\hat{a}_{1},\hat{a}_{2},...,\hat{a}_{k-1}]
A^1:k−1=[a^1,a^2,...,a^k−1]。构建一个其对应的orthogonal complement projector
P
A
^
1
:
k
−
1
⊥
P_{\hat{A}_{1:k-1}}^{\perp}
PA^1:k−1⊥, 在
i
<
k
i<k
i<k时,实现
P
A
^
1
:
k
−
1
⊥
a
i
=
0
P_{\hat{A}_{1:k-1}}^{\perp}a_{i} = 0
PA^1:k−1⊥ai=0。因此我们可以写出:
∥
P
A
^
1
:
k
−
1
⊥
y
[
n
]
∥
2
=
∥
∑
i
=
k
N
s
i
[
n
]
P
A
^
1
:
k
−
1
⊥
a
i
∥
2
\|P_{\hat{A}_{1:k-1}}^{\perp}{\bf{y}}[n]\|_{2} = \|\sum_{i=k}^{N}s_{i}[n]P_{\hat{A}_{1:k-1}}^{\perp}a_{i}\|_{2}
∥PA^1:k−1⊥y[n]∥2=∥i=k∑Nsi[n]PA^1:k−1⊥ai∥2
Convex Geometry(CG)
上述算法基于一种简单的假设,即假设pure pixel成立。实际上pure pixel的理论也是源自于对convex geometry(CG)的学习,可以说是CG 的一种特殊情况。
首先先展示一些较为基础的凸优化表述。
一组向量
{
a
1
,
.
.
.
,
a
N
}
⊂
R
M
\{a_1,...,a_N\}\subset \mathbb{R}^M
{a1,...,aN}⊂RM的 affine hull可以定义为:
a
f
f
{
a
1
,
a
2
,
.
.
.
,
a
N
}
=
{
y
=
∑
i
=
1
N
θ
i
a
i
∣
θ
∈
R
…
…
N
,
∑
i
=
1
N
θ
i
=
1
}
aff\{a_{1},a_{2},...,a_{N}\} = \{y = \sum_{i=1}^{N}\theta_{i}a_{i} |~{\bf{\theta}}\in\mathbb{R}…… {N},\sum_{i=1}^{N}\theta_{i} = 1\}
aff{a1,a2,...,aN}={y=i=1∑Nθiai∣ θ∈R……N,i=1∑Nθi=1}
也可以写做:
a
f
f
{
a
1
,
a
2
,
.
.
.
,
a
N
}
=
{
y
=
C
x
+
d
∣
x
∈
R
P
}
aff\{a_{1},a_{2},...,a_{N}\} = \{y=Cx+d|x\in \mathbb{R}^{P}\}
aff{a1,a2,...,aN}={y=Cx+d∣x∈RP}
一组向量
{
a
1
,
a
2
,
.
.
.
,
a
N
}
⊂
R
M
\{a_{1},a_{2},...,a_{N}\}\subset \mathbb{R}^{M}
{a1,a2,...,aN}⊂RM的convex hull可以定义为:
c
o
n
v
{
a
1
,
a
2
,
.
.
.
,
a
N
}
=
{
y
=
∑
i
=
1
N
θ
i
a
i
∣
θ
≥
0
,
∑
i
=
1
N
θ
i
=
1
}
conv\{a_{1},a_{2},...,a_{N}\} = \{y = \sum_{i=1}^{N}\theta_{i}a_{i} |~{\bf{\theta}}\geq0,\sum_{i=1}^{N}\theta_{i} = 1\}
conv{a1,a2,...,aN}={y=i=1∑Nθiai∣ θ≥0,i=1∑Nθi=1}
其中
c
o
n
v
{
a
1
,
a
2
,
.
.
.
,
a
N
}
conv\{a_{1},a_{2},...,a_{N}\}
conv{a1,a2,...,aN} 在
{
a
1
,
a
2
,
.
.
.
,
a
N
}
\{a_{1},a_{2},...,a_{N}\}
{a1,a2,...,aN}映射独立时,可以被称作一个
(
N
−
1
)
−
s
i
m
p
l
e
x
(N-1)-simplex
(N−1)−simplex。一个simplex的顶点为
a
1
,
a
2
,
.
.
.
,
a
N
a_{1},a_{2},...,a_{N}
a1,a2,...,aN。 一个满维度的simplex的体积可以描述为:
v
o
l
(
a
1
,
a
2
,
.
.
.
,
a
N
)
=
c
∣
d
e
t
(
[
a
1
.
.
.
a
N
1
.
.
.
1
]
)
∣
=
c
∣
d
e
t
(
[
a
1
−
a
N
,
.
.
.
,
a
N
−
1
−
a
N
]
)
∣
vol(a_{1},a_{2},...,a_{N}) = c \left|det\left(\left[ \begin{matrix} a_{1} & ... &a_{N} \\ 1 & ... & 1 \end{matrix}\right]\right)\right| =c|det([a_{1}-a_{N},...,a_{N-1}-a_{N}])|
vol(a1,a2,...,aN)=c∣∣∣∣det([a11......aN1])∣∣∣∣=c∣det([a1−aN,...,aN−1−aN])∣
其中
c
=
1
/
(
N
−
1
)
!
c = 1/(N-1)!
c=1/(N−1)!.
根据前文提到的线性混合模型, 在不考虑噪音项时,
y
[
n
]
∈
c
o
n
v
{
a
1
,
a
2
,
.
.
.
,
a
N
}
,
n
=
1
,
.
.
.
,
L
y[n]\in conv\{a_{1},a_{2},...,a_{N}\}, n = 1,...,L
y[n]∈conv{a1,a2,...,aN},n=1,...,L
即每一个像素处的观测值
y
[
n
]
y[n]
y[n]都可以表述为i端元特征
a
1
,
a
2
,
.
.
.
,
a
N
a_{1},a_{2},...,a_{N}
a1,a2,...,aN的凸组合。当N = 3时,
c
o
n
v
{
a
1
,
a
2
,
.
.
.
,
a
N
}
conv\{a_{1},a_{2},...,a_{N}\}
conv{a1,a2,...,aN}是一个三角形,每一个
y
[
n
]
y[n]
y[n]都被包含于三角形之中,三角形的顶点是端元特征
a
1
,
a
2
,
.
.
.
,
a
N
a_{1},a_{2},...,a_{N}
a1,a2,...,aN。因此,如果我们可以找到
c
o
n
v
{
a
1
,
a
2
,
.
.
.
,
a
N
}
conv\{a_{1},a_{2},...,a_{N}\}
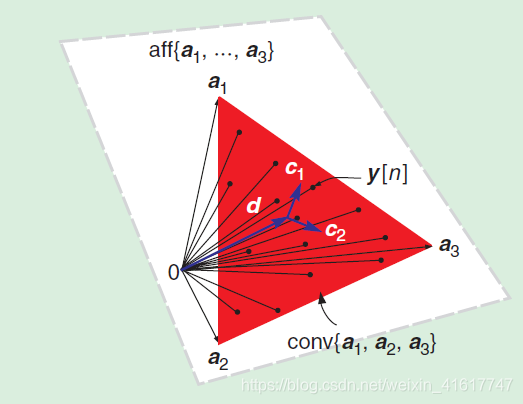
conv{a1,a2,...,aN}的每一个顶点,解混就完成了。
上述情况可在下面途中表述出来:
红色三角形区域代表了
c
o
n
v
{
a
1
,
a
2
,
.
.
.
,
a
N
}
conv\{a_{1},a_{2},...,a_{N}\}
conv{a1,a2,...,aN},三角形中的每一个点都代表着
y
[
n
]
y[n]
y[n]。前面提到,simplex中的每一个点都可以表示为endmember的凸组合。在这种情况下,根据观测值
y
[
n
]
y[n]
y[n]寻找到包围simplex的顶尖,即为解混。
CG based blind HU 直观的来说就是寻找一组向量
{
a
^
1
,
a
^
2
,
.
.
.
,
a
^
N
}
\{\hat{a}_{1},\hat{a}_{2},...,\hat{a}_{N}\}
{a^1,a^2,...,a^N}, 其对应的simplex
c
o
n
v
{
a
^
1
,
a
^
2
,
.
.
.
,
a
^
N
}
conv\{\hat{a}_{1},\hat{a}_{2},...,\hat{a}_{N}\}
conv{a^1,a^2,...,a^N}可以最好的拟合真正的端元simplex
c
o
n
v
{
a
1
,
a
2
,
.
.
.
,
a
N
}
conv\{a_{1},a_{2},...,a_{N}\}
conv{a1,a2,...,aN}
当
y
[
n
]
∈
c
o
n
v
{
a
^
1
,
a
^
2
,
.
.
.
,
a
^
N
}
y[n]\in conv\{\hat{a}_{1},\hat{a}_{2},...,\hat{a}_{N}\}
y[n]∈conv{a^1,a^2,...,a^N} 时,同样有
y
[
n
]
∈
a
f
f
{
a
^
1
,
a
^
2
,
.
.
.
,
a
^
N
}
y[n]\in aff\{\hat{a}_{1},\hat{a}_{2},...,\hat{a}_{N}\}
y[n]∈aff{a^1,a^2,...,a^N} 成立。因此,
y
[
n
]
y[n]
y[n]同样可以表示为:
y
[
n
]
=
C
x
[
n
]
+
d
y[n] = Cx[n]+d
y[n]=Cx[n]+d
这里
C
∈
R
M
×
(
N
−
1
)
C\in \mathbb{R}^{M\times (N-1)}
C∈RM×(N−1),
r
a
n
k
(
C
)
=
N
−
1
rank(C) = N-1
rank(C)=N−1,
d
∈
R
M
d\in \mathbb{R}^{M}
d∈RM,
x
[
n
]
∈
R
N
−
1
x[n]\in \mathbb{R}^{N-1}
x[n]∈RN−1,
n
=
1
,
.
.
.
,
L
n = 1,...,L
n=1,...,L。 若
(
C
,
d
)
(C,d)
(C,d)已知,上式可以变形为:
x
[
n
]
=
C
†
(
y
[
n
]
−
d
)
x[n] = C^{\dagger}(y[n]-d)
x[n]=C†(y[n]−d)
根据前文的线性混合模型,可以得到:
x
[
n
]
=
∑
i
=
1
N
b
i
s
i
[
n
]
=
B
s
[
n
]
x[n] = \sum_{i=1}^{N}b_{i}s_{i}[n] = {\bf{B}}{\bf{s}}[n]
x[n]=i=1∑Nbisi[n]=Bs[n]
这里
b
i
=
C
†
(
a
i
−
d
)
∈
R
N
−
1
,
i
=
1
,
.
.
.
,
N
b_i= C^{\dagger}(a_i-d)\in \mathbb{R}^{N-1},~ i =1,...,N
bi=C†(ai−d)∈RN−1, i=1,...,N,
B
=
[
b
1
,
.
.
.
,
b
N
]
∈
R
N
−
1
×
N
B = [b_1,...,b_{N}]\in \mathbb{R}^{N-1\times N}
B=[b1,...,bN]∈RN−1×N。由维度可见,此处的维度小于原维度
M
M
M,换而言之上述过程实际上实现了降维的功能。
经典的CG思路中有多种方法去解决,例如VOLMAX,N-FINDER,VOLMIN。他们全部建立在对于simplex的估计,并期望达到最佳拟合。希望可以估计出一组合适的
{
a
^
1
.
.
.
a
^
N
}
\{\hat{a}_1... \hat{a}_N\}
{a^1...a^N} 可以最大程度的拟合endmember matrix。VOLMAX 和N-FINDER 都是希望在观测值中寻找出可以最大化体积的点,当pure pixel成立时,所得到的simplex即为真正的endmember matrix。然而,Pure pixel的假设往往难以在实际情况中成立,因此SPA、VOLMAX、NFINDR等算法在处理高光谱解混往往难以表现良好。
在诸多文章中,VOLMIN已经被证明可以更好的估算出endmember的位置。其思路是在观测值组外,寻找到可以包含观测值组并有最小体积的simplex。图中对比了在不同观测条件下,三种不同思路的准确度。可以看到当pure pixel成立时,三种算法都可以准确找到真正的endmember(前两种算法正是基于pure pixel假设成立而提出)。而当pure pixel不再成立时,VOLMIN仍能准确定位endmember。但当观测值的分布过于集中时,如图中第三种情况。VOLMIN虽然可以更为接近真正的endmember位置但却不足以准确定位他们的位置。因此上述的算法都存在有一定的局限性。
Nonnegative matrix factorization(NMF)
NMF是一个强有力的工具。NMF的目的是基于观测数据
S
∈
R
N
×
L
S\in \mathbb{R}^{N\times L}
S∈RN×L 寻找到
A
∈
R
M
×
N
A\in \mathbb{R}^{M\times N}
A∈RM×N 和
S
∈
R
N
×
L
S\in \mathbb{R}^{N\times L}
S∈RN×L ,其维度满足
N
<
min
{
M
,
L
}
N<\min\{M,L\}
N<min{M,L}, 估计两个矩阵的问题可以写为:
min
A
≥
0
,
S
≥
0
∥
Y
−
A
S
∥
F
2
\min_{A\geq0,S\geq0}\|Y-AS\|_{F}^{2}
A≥0,S≥0min∥Y−AS∥F2
在无源解混的过程中, 矩阵 A A A 和 S S S 通常被分别认为是对端元和丰度的估计。然而在使用NMF去实现解混的过程中存在两个问题:
- 过高的计算复杂度,通常被认为是一个NP hard问题
- 简单NMF很难保证其解的唯一性,在HU中也正是一个致命的问题,即其解可能并非真正的端元和丰度
为了解决上述的问题,在使用NMF 解决HU问题时,往往需要对本小节的第一个公式进行补充调整,使其可以更好的符合问题的需求。
min
A
≥
0
,
S
≥
0
∥
Y
−
A
S
∥
F
2
+
α
⋅
g
(
A
)
+
β
⋅
f
(
S
)
\min_{A\geq0,S\geq0}\|Y-AS\|_{F}^{2} + \alpha \cdot g(A) + \beta \cdot f(S)
A≥0,S≥0min∥Y−AS∥F2+α⋅g(A)+β⋅f(S)
其中
S
L
=
{
S
∣
s
[
n
]
≥
0
,
1
T
s
[
n
]
=
1
,
1
≤
n
≤
L
S^{L} = \{S|s[n]\geq0,1^{T}s[n] = 1,1\leq n\leq L
SL={S∣s[n]≥0,1Ts[n]=1,1≤n≤L,
g
g
g 和
h
h
h看作 regularizers,
α
,
β
>
0
\alpha,\beta>0
α,β>0是常数。 regularizers的选择往往根据实际应用算法的不同而更改。
以MVCNMF方法为例,regularizers的选择是simplex的体积。
为了在HU问题中使用NMF并使其拥有唯一解,很多限定条件需要附加到计算中,一方面增加了问题的复杂度,另一方面也使得问题的描述不直观。而HSI往往是以一个三维度tensor提供的,因此使用tensor来描述和解决问题似乎是一种更为直观的方法。
Nonnegative tensor factorization
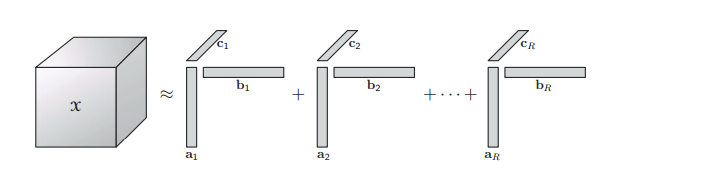
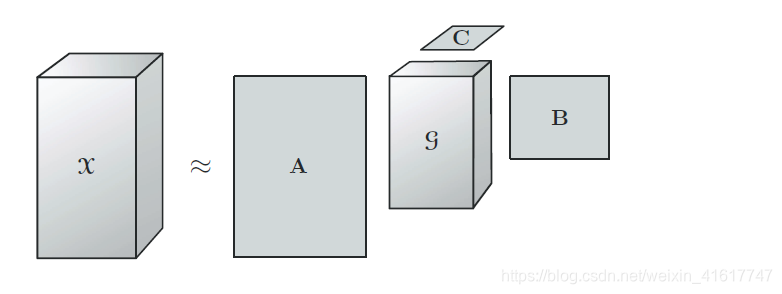
本小节中会简单介绍四种不同的张量分解思路,此处借用了熊伏枥的博客http://www.xiongfuli.com/中的部分图片:
-
CPD
-
-
Tucker decomposition
-
BTD
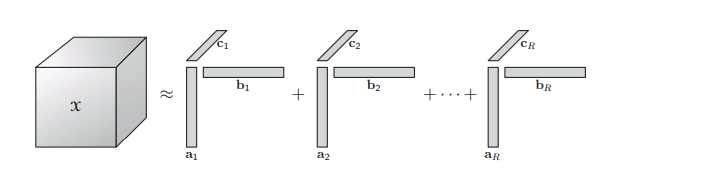
- Matrix-vector tensor decomposition(LL1 BTD)
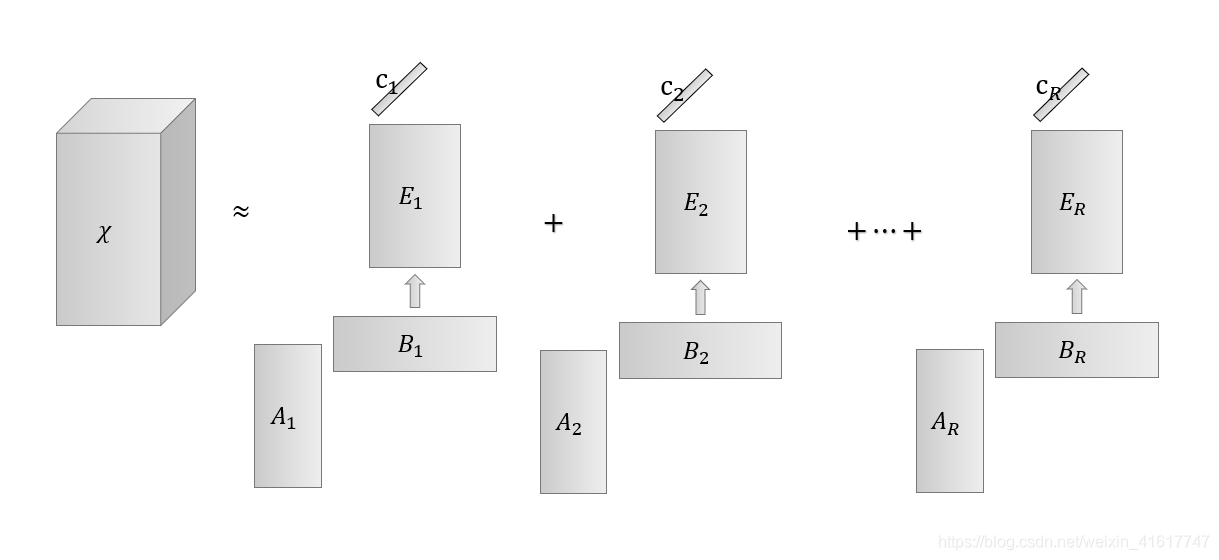
上面四张图片展示了四种不同的tensor展开形式。
相对于NMF,NTF有更为优势的条件去实现 Hyperspectral Unmixing。---------------未完

















 777
777

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









