






已知世界坐标系的坐标xoy,以及世界坐标系下点P的坐标P(x,y),求旋转α角度后点P在坐标系x1o1y1中的坐标。
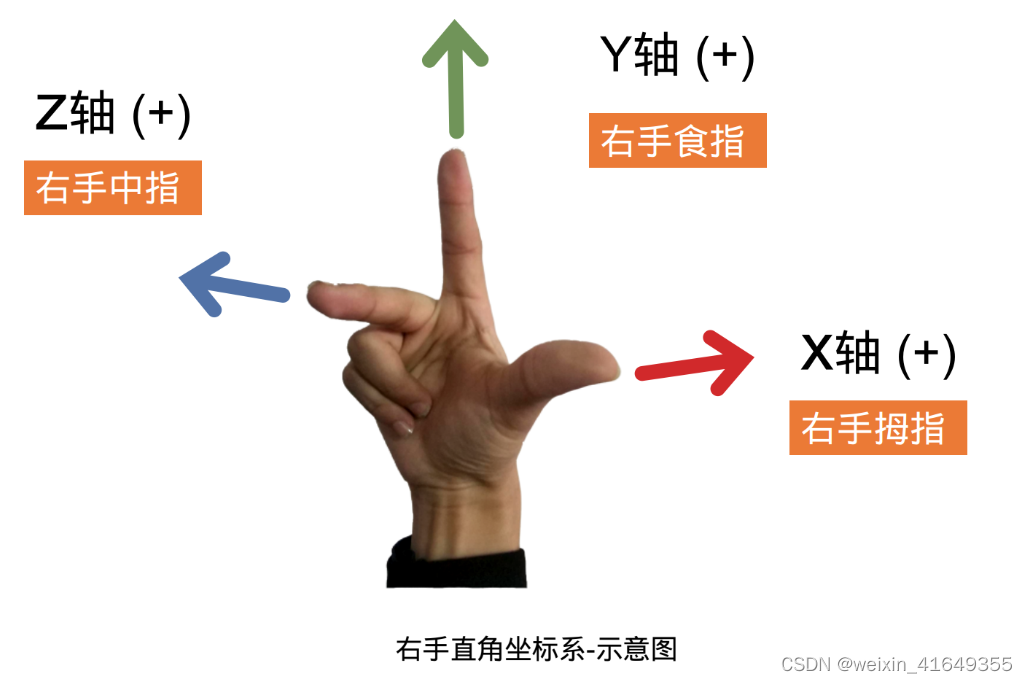
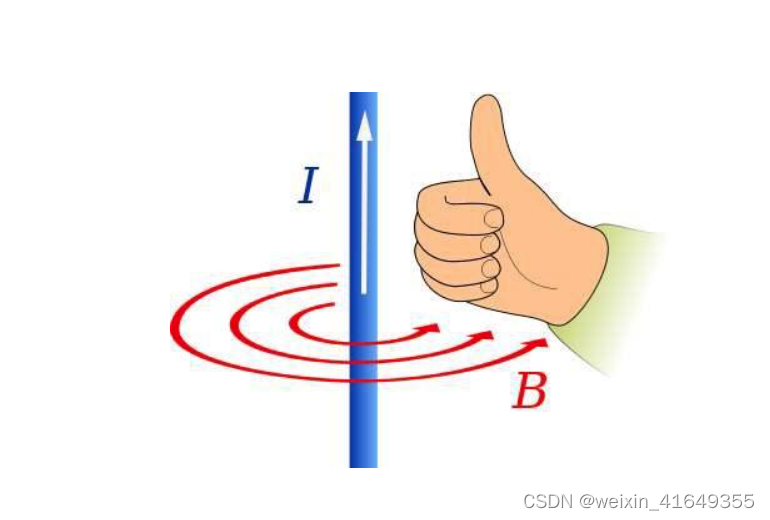
如下图,根据右手坐标系可得xyz坐标系如下所示,由右手螺旋法可知,四指沿着坐标系旋转方向,大拇指所指的方向和z轴一致,则选转角度为正,若大拇指所指方向与大拇指方向相反,则旋转角度为负;
右手坐标系下,逆时针旋转角度为正,顺时针旋转角度为负;
逆时针旋转矩阵为:
则xoy坐标系旋转α角度后的P点在x1o1y1系中的坐标为:
注意,求出的x1和y1是原坐标系不变,点逆时针旋转a角度后相对于原坐标系下的坐标值;
若要求坐标系逆时针旋转后的点坐标,坐标系逆时针旋转a角度,等价于点顺指针旋转a角度,将a的值取-a即可得到坐标系旋转后点P的坐标值;
化简后得:
一般采用先平移后旋转的方法进行变换,参考先移动后旋转与先旋转后移动的区别-百度经验 (baidu.com) https://jingyan.baidu.com/article/414eccf617a9c66b421f0a5e.html
https://jingyan.baidu.com/article/414eccf617a9c66b421f0a5e.html


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









