







1 准备工作
1.1 time模块
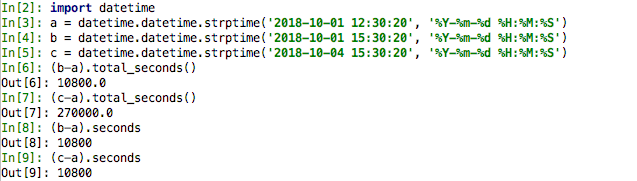
python datetime 模块中 常用 seconds 和 total_seconds() 来获取时间差
seconds 忽略天 只看时分秒
total_seconds() 真正的时间差 包含天
import datetime
import time
from time import sleep
# 1输出当前的时间
time = datetime.datetime.now()
print("当前时间为%s" % time)
print("%s/%s/%s" % (time.day, time.month, time.year))
print("当前年份%s" % time.year)
print(time.month)
print(time.day)
print(time.hour)
print(time.minute)
print(time.second) # 省略小数点
# 2计算时间差
# 2.1法1
start = time.time()
for _ in range(100000000):
pass
end = time.time()
print("循环运行时间:%.2f秒" % (end-start))
# 2.2法2
start = datetime.datetime.now()
for i in range(2000000000):
pass
end = datetime.datetime.now()
print((end - start))
print("程序运行时间:"+str((end-start).seconds)+"秒") # 将时间差转换为秒
# #3sleep函数可以让程序休眠(推迟调用线程的运行)。
start = datetime.datetime.now()
for i in range(3):
sleep(3)
end = datetime.datetime.now()
print((end-start).seconds) # 输出为9
1.2 ord
ord()函数就是用来返回单个字符的ascii值(0-255)或者unicode数值()
>>> ord('d')
100
>>> ord('5')
53
chr()函数是输入一个整数【0,255】返回其对应的ascii符号
>>> chr(100)
'd'
>>> chr(53)
'5'
1.3 矩阵乘法
import numpy as np
a = np.array([[1, 2], [4, 5]])
print(a.transpose()) # [[1 4][2 5]]
print(np.linalg.inv(a)) # 必须是方阵 # [[-1.66666667 0.66666667][ 1.33333333 -0.33333333]]
print(np.dot(a, np.linalg.inv(a))) # [[1.00000000e+00 0.00000000e+00][2.22044605e-16 1.00000000e+00]]
print(np.multiply(a, a)) # [[ 1 4][16 25]]
2 代码实现
import argparse
import time
import cv2
import numpy as np
# 配置参数
ap = argparse.ArgumentParser() # -v videos/nascar.mp4 不要少了文件夹名字
ap.add_argument("-v", "--video", type=str,
help="path to input video file")
ap.add_argument("-t", "--tracker", type=str, default="csrt", # 这个感觉比kcf好
help="OpenCV object tracker type")
args = vars(ap.parse_args())
# opencv已经实现了的追踪算法,传统算法
# 深度学习??准确高,实时低,电子设备中难,因为网络大
OPENCV_OBJECT_TRACKERS = {
"csrt": cv2.TrackerCSRT_create,
"kcf": cv2.TrackerKCF_create, # 流行,cf相关滤波,14年
# cf找到待追踪的圆(第一帧所在的位置),再对边缘进行padding,训练一个分类器(或者滤波矩阵),
# 生成正样本和负样本训练,训练的目标是找到滤波矩阵,计算下一步哪个位置得到响应大。
# 具体内容,看论文。
# kcf,改进了计算,提高计算速度。1正负样本选择上改进;2核函数,低维变成高维。
"boosting": cv2.TrackerBoosting_create, # 十几年前
"mil": cv2.TrackerMIL_create,
"tld": cv2.TrackerTLD_create,
"medianflow": cv2.TrackerMedianFlow_create,
"mosse": cv2.TrackerMOSSE_create # 10年
}
# 速度(实时)和准确性
# 实例化OpenCV's multi-object tracker
trackers = cv2.MultiTracker_create() # 实例化多目标追踪。
# tracker = cv2.TrackerCSRT_create() # 追踪器不要在这里创建,这里创建就只产生一个追踪器
vs = cv2.VideoCapture(args["video"]) # 这个不要在while里面创建
# 视频流
while True:
# 取当前帧
frame = vs.read()
# (true, data)
frame = frame[1]
# ret, frame = capture.read() # 这个就不用cv2.imread(frame),frame已经是参数了
# 到头了就结束
if frame is None:
break
# resize每一帧
(h, w) = frame.shape[:2] # 原始图片大,计算性能低
width = 600
r = width / float(w)
dim = (width, int(h * r))
frame = cv2.resize(frame, dim, interpolation=cv2.INTER_AREA)
# 追踪结果
(success, boxes) = trackers.update(frame) # 没有添加追踪器,是一个空架子。
print(success, boxes) # success返回值一直都是True,
# boxes返回值为:[[333. 172. 45. 76.]],# 在未画下框的时候,读取为空。
# [[278. 166. 36. 62.]
# [501. 242. 41. 67.]]
print("trackers:", trackers)
# 绘制区域
for box in boxes: # 确保适合多追踪器
(x, y, w, h) = [int(v) for v in box]
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
# 显示
cv2.imshow("Frame", frame)
print(cv2.waitKey(100)) # 返回值为-1,-1&0xFF的结果为255
key = cv2.waitKey(100) & 0xFF
# 0xFF是十六进制常数,二进制值为11111111。通过使用位和(和)这个常数,
# 它只留下原始的最后8位(在这种情况下,无论CV2.WaITKEY(0)是),此处是防止BUG。
if key == ord("s"): # ord
# 选择一个区域,按s
box = cv2.selectROI("Frame", frame, fromCenter=False,
showCrosshair=False) # fromCenter选中的为中心点拉。showCrosshair展示中心十字架。
# 对应显示窗口名称和窗口显示的内容,cv2.imshow("Frame", frame)
# 创建一个新的追踪器
tracker = OPENCV_OBJECT_TRACKERS[args["tracker"]]() # 指定追踪器
trackers.add(tracker, frame, box) # 添加追踪器,frame哪幅图像,哪个区域box
# 退出
elif key == 27:
break
vs.release()
cv2.destroyAllWindows()
注意:
import cv2
capture = cv2.VideoCapture("1.mp4") # 这个不要在while里面创建
# tracker = cv2.TrackerCSRT_create() # 追踪器不要在这里创建,这里创建就只产生一个追踪器
trackers = cv2.MultiTracker_create()
while True:
ret, frame = capture.read() # 这个就不用cv2.imread(frame),frame已经是参数了
for box in boxes:
print(box)
(x, y, w, h) = [int(v) for v in box] # 这样写好
cv2.rectangle(frame, (x, y), (x+w, y+h), (0, 255, 0), 2)
















 3327
3327











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









