







 本文介绍了如何调试FastMRI项目中的unet网络。内容包括安装依赖包,解决torch版本问题,调整代码结构,以及训练和验证模型的步骤。在调试过程中,需要将common和data文件夹移至正确位置,并修改import语句以避免模块找不到的错误。训练和验证模型的输出路径以及查看日志的方法也进行了说明。
本文介绍了如何调试FastMRI项目中的unet网络。内容包括安装依赖包,解决torch版本问题,调整代码结构,以及训练和验证模型的步骤。在调试过程中,需要将common和data文件夹移至正确位置,并修改import语句以避免模块找不到的错误。训练和验证模型的输出路径以及查看日志的方法也进行了说明。
fastmri是FaceBook和纽约大学医学院放射科合作的一个项目,旨在用深度学习的方法加速MRI重建。
数据:https://fastmri.med.nyu.edu/
调试:
1、首先按照教程装依赖包,我用下面的 pip install -r requirments.txt有报错的地方。所以我是直接打开requirments.txt,一个一个手动装包。
torch0.4.1 它提供的版本报错。所以我按照下面这个网址的方法装,https://blog.csdn.net/zywvvd/article/details/86685871

2、装好依赖包后,修改程序。
1)把/home/txx/code/fastMRI-master/文件夹下的common和data文件夹放到/home/txx/code/fastMRI-master0/models/unet下,否则会提示找不到common和data模块。
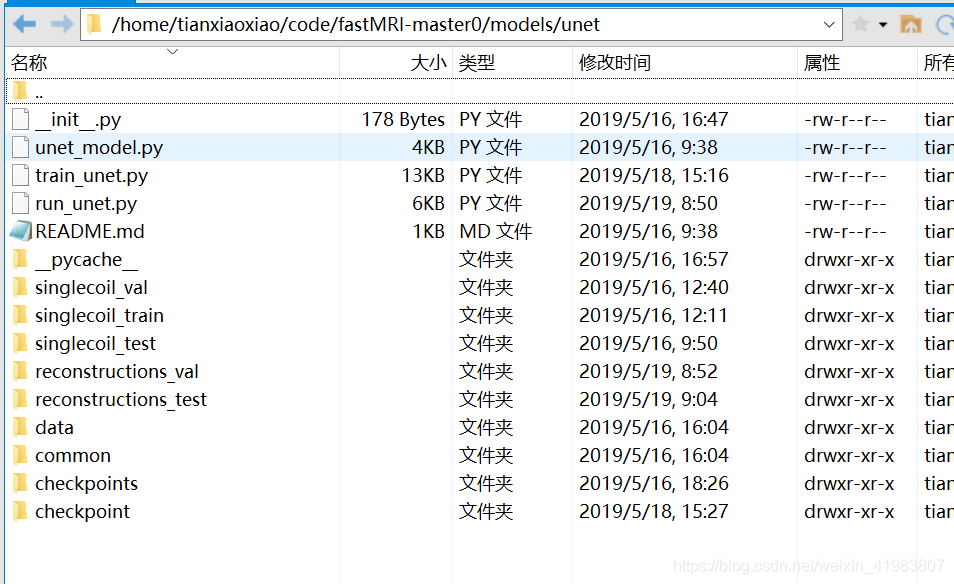
2)再修改/home/txx/code/fastMRI
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 440
440

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









